Hamiltonian neural networks for solving equations of motion
Abstract
There has been a wave of interest in applying machine learning to study dynamical systems. We present a Hamiltonian neural network that solves the differential equations that govern dynamical systems. This is an equation-driven machine learning method where the optimization process of the network depends solely on the predicted functions without using any ground truth data. The model learns solutions that satisfy, up to an arbitrarily small error, Hamilton’s equations and, therefore, conserve the Hamiltonian invariants. The choice of an appropriate activation function drastically improves the predictability of the network. Moreover, an error analysis is derived and states that the numerical errors depend on the overall network performance. The Hamiltonian network is then employed to solve the equations for the nonlinear oscillator and the chaotic Hénon-Heiles dynamical system. In both systems, a symplectic Euler integrator requires two orders more evaluation points than the Hamiltonian network in order to achieve the same order of the numerical error in the predicted phase space trajectories.
I Introduction
Studying the evolution of dynamical systems has become a significant trend in scientific research. The information age has generated an exponential increase in the amount of digital data being stored, and a non-trivial fraction of these data-sets describe the evolution of dynamical systems. These include a wide range of systems, from large-scale astrophysics to nano-scale quantum physics. Recently, machine learning models, and particularly neural networks (NNs), have been used to explore such datasets and forecast the future behavior of complex dynamical systems [1, 2, 3], spatiotemporal chaotic behavior [4, 5], classify time series [6, 7], improve turbulence models [8, 9, 10, 11], discover differential equations (DEs) [12, 13, 14, 15], and find approximate solutions for those equations [16, 17]. In addition to the data-driven studies, equation-driven and data-free unsupervised NNs have been used to solve ordinary and partial DEs relevant to a variety of physical systems [18, 19, 20, 21, 22]. Equation-driven networks construct analytical functions that satisfy a particular differential structure; subsequently, in the training process of such models, we do not need any ground truth data. Essentially, the loss function solely depends on the solutions obtained by the NN while the training process is fully data-free. This formulation results in an unsupervised learning method. We emphasize that the proposed method does not use any data generated by traditional numerical solvers. Furthermore, the universal approximation theorem of NNs [23] states that a NN can approximate any smooth function with arbitrary accuracy. This makes NNs as a suitable approach to solving complicated problems governed by differential equations.
Physics-inspired and physics-informed neural networks have been widely used for solving differential equations providing some potential advantages over using traditional integrators [24]. The effectiveness of these machine learning solvers have been demonstrated by tackling challenging problems, where traditional numerical methods become inefficient, like solving high-dimensional PDEs [19, 20], systems with moving boundary [25], and inverse problems [17, 26, 27]. Solving DEs with NNs is a rapidly-growing field and new techniques are regularly proposed to advance and improve these machine learning solvers including Monte Carlo sampling [22], Fourier neural operators [28], curriculum regularization and sequential learning [29]. This work contributes to this effort by introducing a Hamiltonian structure in the NN framework that improves the solving capability of nonlinear Hamiltonian systems. The computations of a NN can be efficiently implemented on parallel architectures leading to significant speed-up [18]. Indeed, recent hardware innovations, and in particular the wide adoption of and access to GPUs, can drastically accelerate the computation process with minimal parallelization effort. This is a great advantage over traditional integrators where time-parallel algorithms are challenging to develop and implement. An overview of advantages and challenges in parallel in time integration methods are summarized by [30], while Ref. [31] shows that modern methods have been invented to parallelize the time integration and can be used in deep networks for a ‘layer-parallel training’ accelerating the network optimization.
Data-driven Hamiltonian NNs have been proposed to impose physically informed inductive biases in the learning process. These networks are trained faster and generalize better than regular fully connected NNs, while they learn and respect exact conservative quantities such as the energy [32, 33, 34, 35]. More specifically, Greydanus et al. [32] introduced Hamiltonian networks with embedded the Hamiltonian formalism showing that a NN can be used to learn a Hamiltonian that describes some given temporal trajectories. The time derivatives and time dependence are eliminated by using Hamilton’s equations and automatic differentiation resulting a time invariant energy. Once the Hamiltonian has been learnt, predicting the motion of different initial conditions within and outside the training regime is possible by numerically solving Hamilton’s equations. Recently, this approach has been successfully applied to learn Hamiltonians, forecast chaotic behavior, and predict transition to chaos [34, 36]. The framework of the Hamiltonian NNs is quite general and can be implemented in different machine learning architectures like reservoir computing [37] and graph networks as well as, numerical integrators can be embedded in the network architecture to provide further improvement in the long-term forecasting [38, 35]. Moreover, generative Hamiltonian networks have been proposed to generate trajectories that respect certain underlying laws like energy and momentum conservation and subsequently, the generated data respect fundamental physical principles [39]. Other extensions of standard Hamiltonian networks consider learning the dynamics of systems in the presence of external driven forces and dissipation. Adopting more general formulations like port-Hamiltonian, NNs are capable of predicting trajectories for damped and driven time-varying dynamical systems as well as, they can efficiently uncover underlying physical quantities hidden in data, like a stationary Hamiltonian, dissipation parameters, and external time-dependent forces [40]. These recent studies evidence that the learning capability of NNs can be drastically improved by embedding Hamiltonian formulation in the framework, nevertheless, the advantages of imposing Hamiltonian’s equations in NNs to solve DEs have not been studied yet. In this work we introduce and investigate a Hamiltonian NN used to solve the equations of motion of nonlinear dynamical systems. This is an equation-driven approach instead of data-driven model, because the form of the Hamiltonian and the initial state of a system are assumed to be known, while ground truth trajectories (data) are not required in the training process. In other words, standard Hamiltonian networks are learning the Hamiltonian function from given data, whereas, our proposed model discovers trajectories that approximately satisfy Hamilton’s equations. Subsequently, the two approaches are conceptually different, despite the fact that Hamiltonian formulation is embedded in both networks.
The current work presents a data-free Hamiltonian neural network architecture that is used for solving DE systems. Despite the success of physics-inspired NNs in solving DEs, Hamiltonian NN solvers have not been explored yet. Subsequently, the proposed Hamiltonian NN is an evolution of previously used data-free NNs for approximating solutions to DEs that identically satisfy boundary and initial conditions. We improve upon other NN DE solvers by speeding up the convergence of the network to the solution while reaping the benefits of the underlying physical properties. We propose a NN architecture inspired by and geared towards Hamiltonian systems with time-independent Hamiltonians. Once optimized, the NN satisfies Hamilton’s equations over the entire temporal domain, directly implying the conservation of every invariant under the respective Hamiltonian flow. As it has been discussed in [20], calculating second derivatives using automatic differentiation is much more expensive than the calculation of first derivatives. Here, we avoid this bottleneck by solving systems of first order DEs, Hamilton’s equations, instead of second order equations. NN solvers are conceptually different than traditional numerical solvers. Symplectic integrators are designed to conserve the energy over long time ranges. Being iterative solvers, these traditional methods accumulate errors in time and also require values of the calculations at previous time points in order to construct an approximate solution. Traditional integrators conserve a Hamiltonian (energy) that is slightly different than the true Hamiltonian. On the other hand, the suggested Hamiltonian NN evaluates each time point independently and simultaneously satisfies all the differential equations of a system. As a result, the Hamiltonian network conserves the original Hamiltonian and leads to a significant reduction in any accumulated numerical errors. Another distinct machine learning direction is the development of neural network integrators [19, 16]. These hybrid models combine traditional integrators with NNs improving the performance in solving DEs. Our NN solver does not belong to this class of machine learning methods since it does not require a structured mesh or embed any iteration algorithm. On the other, the proposed model suggests an alternative way to solve ODEs with neural networks without embeding conventional integrators. The proposed Hamiltonian NNs consist of a more numerically precise and robust method to solve dynamical equations than standard semi-implicit schemes such as a symplectic Euler integrator. By sharing the network weights, choosing a trigonometric activation function, penalizing violations in energy conservation law, and using an efficient parametric form of solutions, we show a speed-up in the convergence behavior during the optimizing process and, subsequently, an improvement in the predictability of the network. Also, we show that after training the proposed NN architecture can be considered a true and globally symplectic unit and thereby a time-invariant unit.
In the rest of this study, we describe the Hamiltonian NN architecture that is used to approximate Hamiltonian trajectories. An error analysis is performed and shows that the accuracy of the predicted solutions can be predefined before optimizing the network. Then, the proposed symplectic NN is applied to solve the equations that describe the motion of a nonlinear oscillator and a two-dimensional chaotic system. We point out situations where the Hamiltonian NN solver out-performs the semi-implicit Euler numerical method, a first order sympletic integrator. However, a comparison with higher order symplectic integrators is not presented in this work. The network performance is demonstrated by exploring different architectures through different parametric solutions and activation functions. Accurate long-time solutions are obtained by using a regularization term to encourage the discovery of solutions that conserve the total energy. The experiments presented in this manuscript have been performed by using PyTorch [41] and the codes are published on github 111https://github.com/mariosmat/hamiltonianNNetODEs. We conclude this study with a summary of the key ideas introduced in this work, the advantages of using a Hamiltonian NN to solving DEs, and with a discussion of future plans.
II Hamiltonian Neural Network
II.1 Network architecture
A cornerstone idea in classical mechanics is that a system’s evolution can be investigated through the study of its underlying symmetries and constraints. By the 20th century, Lagrange, Hamilton, and others had shown that the dynamics of a system is tethered to simple scalar functions, the Lagrangian and Hamiltonian functions, with multiple conservation laws and their underlying symmetries prepackaged with these functions. These scalar functions are then used to derive the DEs that govern the motion of a system. In particular, starting from the Lagrangian (the difference between kinetic and potential energy), invoking Hamilton’s principle (the motion follows trajectories that minimize the action integral), and employing techniques from the calculus of variations, the motion of a system is described by the Euler-Lagrange (E-L) equations. In the Hamiltonian formulation, on the other hand, we start from the Hamiltonian which is a transformation of the Lagrangian and is a conservative quantity, namely it does not change in time. This formulation results in Hamilton’s equations, which are equivalent to the E-L equation and therefore minimize the same action. Hamilton’s equations are a coupled set of first order DEs, whereas Lagrangian formalism provides a single set of second-order DEs. The Hamiltonian formulation possesses inherent advantages over the Lagrangian as a coupled set of first-order DEs is numerically more stable and more comfortable to solve than a single set of second-order DEs. Nevertheless, the resulting DEs are often analytically intractable, so engineers and scientists resort to discretization techniques to obtain solutions. However, the discretization procedure for solving the DEs could lead to violations of the underlying conservation laws. This issue can by cured by using NN solvers that able to provide analytical solutions that respect the underlying principles. Indeed, any sort of semi-implicit method, like symplectic Euler integrator, allows errors to accumulate in time. Chaotic systems in particular, are highly sensitive to such concerns and are, therefore, an ideal ground for testing the performance of the proposed Hamiltonian NN.
We consider a physical system of many bodies that are moving in space. The motion of those objects can be described in a -dimensional configuration space which is defined by the specification of the position as a function of the time of all objects in a system. More precisely, is defined as the product of the number of bodies in a system and the number of spatial dimensions that those objects are allowed to move. In the Lagrangian formulation we are working on the configuration space, whereas, the Hamiltonian formalism is defined in the phase space, which consists of the position and momentum of the objects. Subsequently, each dimension in the configuration space associates with two degrees of freedom in the phase space. In this work, we are interested in Hamiltonian framework, therefore we consider a phase space of dimensions. Many classical systems, from the simple pendulum to solar systems, can be described by the separable Hamiltonian form , where the potential energy term depends solely on the generalized space coordinates , and the kinetic term depends solely on the generalized momenta . Since this Hamiltonian form does not depend directly on time, systems described by it will conserve energy. Other dynamical invariants may also be inbuilt, depending upon the specific choice of the individual phase space variables and their corresponding continuous symmetries [43]. As an example, when the Hamiltonian does not directly depend on a coordinate , the associated momentum is conserved and vice versa. For such Hamiltonian functions, the dynamics are governed by following coupled DEs, called Hamilton’s or canonical equations:
| (1) |
where dots denote time derivatives. An elegant way of expressing Hamilton’s equations is the symplectic notation. Let , and J be the matrix
| (2) |
where and represent the zero and unity matrix, respectively. Then, Hamilton’s equations can be written in the compact vector form
| (3) |
where Numerical methods that evaluate Eq. (3) are called symplectic methods and have been widely used to calculate the long-term evolution of chaotic systems [44]. In this work we present an alternative method based on NNs to solve Eq. (3). As we will discuss below, symplectic integrators conserve a Hamiltonian which is slightly perturbed from the original, whereas, symplectic NNs conserve the original Hamiltonian. This is a great advantage that the proposed NN has over the symplectic integrators.
An alternative approach to the numerically solving DEs is offered by feed-forward NNs [18, 20, 24]. One key advantage of such NNs over traditional numerical methods is that they seek to learn actual functions that satisfy the DEs, rather than creating an approximation to the real solution. Moreover, the NN’s solutions are in a closed, differentiable, and analytic form [18], and the calculations can be efficiently implemented on parallel architectures leading to significant speed-ups [18]. The advantage in using our proposed NN architecture is that it provides solutions that satisfies Hamilton’s equations simultaneously. Thus, the dynamical invariants of a particular Hamiltonian are being respected to the required precision, compared to the accumulation of errors that is inevitable in iterative solvers. To compare, we present the semi-implicit Euler method, which is the simplest, yet most widely used, symplectic integrator for solving Hamilton’s equation. Symplectic Euler method conserves energy up to a fluctuating error because it conserves a slightly different Hamiltonian than the original. For the separable Hamiltonian form , the symplectic Euler scheme for solving the system (1) reads
| (4) | ||||
| (5) |
Here, is the time step between two sequential time points, denotes the time point that is evaluated, , and . Due to the iterating nature of symplectic Euler method, we read in Eqs. (4), (5) that the solutions at two sequential time points are needed to evaluate Hamilton’s equations at any point, leading to numerical error in the calculation of energy, that is proportional to . Similarly, higher-order iterative symplectic integrators accumulate numerical error, however, this work presents a comparison only between the solutions obtained by the proposed NN solver and the first order symplectic Euler integrator.
The objective of this study is to solve Hamilton’s equations (3) in a certain time interval by using NNs. Let us consider the general form of parametric solutions
| (6) |
where is the solution vector discovered by the NN, is the initial state vector, and is a vector of outputs of a feed-forward fully connected NN. The parametric function enforces the initial conditions in the parametric solutions, i.e. when . The network takes as a single input the time point , where denotes the -th sequential point; without losing the generality, we consider the initial time . We train the NN by minimizing, with respect to the learning parameters of the network, the mean-squared error (MSE) defined by Hamilton’s equations (3) as:
| (7) |
where and is the total number of the input time points used for the network optimization. The term can be any regularization term where is the regularization parameter. We have found that for long time predictions it is efficient to use a regularization term that penalizes violations of the energy conservation law. Given the initial state and corresponding energy, , of a system, a convenient regularization term is
| (8) |
For long-time prediction, the use of the regularization loss (8) stabilizes the predicted trajectory at the correct energy level and can result in faster network convergence. In the present work, results are presented for unless otherwise specified.
The time derivatives are obtained by using automatic differentiation that computationally costs one back-propagation through the entire network [41]. We first generate equally-spaced time points in the training time interval . Then, we randomly perturb these points in each epoch as: where is a random term obtained by a normal distribution [20]. This trick improves the network predictability as it is effectively trained over a continuous time interval. In addition, perturbing the training points in every epoch employs the stochastic gradient descent (SGD) method, and thus it assists the optimizer to escape from local minima in the loss function. Perturbing the points in every epoch means that we perturb the loss function and, subsequently, the local minima are dynamically moving. In the context of SGD, each epoch is considered as a mini-batch while all the epochs consist the whole batch for the training set. Minimizing the loss function in Eq. (7) yields solutions that identically respect the symplectic structure of Eq. (3) and accordingly, every dynamical invariant of the Hamiltonian flow is respected too. We point out that the NN solutions are of high accuracy when the NN is evaluated in the training interval but the error rapidly increases outside of the training interval. The proposed Hamiltonian NN architecture is graphically demonstrated in Fig. 1. It is worth noting that the proposed network of Fig. 1 has a different architecture than one used in standard Hamiltonian NNs [32]. Our network takes as input and returns , whereas, the input in the standard Hamiltonian networks is and the output is .
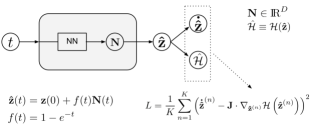
A crucial role in the performance of the NN is played by . A standard choice to enforce initial conditions is , which satisfies [18]. However, this is an unbounded function that adds further difficulty when becomes large. Specifically, for the NN outputs after enough epochs, Eq. (6) states that . As increases the tends to zero, which affects negatively the network predictability in large time scales. To remedy this inefficiency we propose the parametric function
| (9) |
which is a smooth, bounded function, with . Later, we show that the specific choice of parametric function drastically improves the predictability of the NN solver. Interestingly enough, the fact that rapidly tends to implies that the proposed architecture consists a symplectic NN. In particular, for and at the limit Eq. (7) yields , and as , we have . Considering the aforementioned two limits and performing the linear transformation we obtain:
| (10) |
which indicates that the proposed architecture comprises a symplectic NN that states that the function is time invariant.
A substantial advance that our method suggests is the energy regularization of Eq. (8). Because the absence of a iteration learning, the NN solver does not build the solutions using predictions from previous steps. As a result, it tends to forget the initial state of the system and thus, in long time solutions, energy leaking might be observed resulting to error accumulation. This issue becomes crucial in long-time solutions reducing the ability of solving nonlinear and especially chaotic systems of ODEs. The regularization loss of Eq. (8) stabilizes the predicted trajectories at the correct energy yielding a robust solver. Another important innovation of this work is the choice of the activation function. It has been shown that NN with trigonometric activation functions can learn periodic behavior from data outperforming networks that use common activations like Relu and Sigmoid [45]. We adopt this approach and choose the trigonometric as the activation function. Empirical results presented later through numerical experiments indicate that activation outperforms sigmoid in solving ODEs for Hamiltonian systems.
II.2 Error Analysis
We seek to provide a rough bound on the error in the solution based on the maximum value of the loss function. To begin, note that Eq. (7) can be written as
| (11) |
where
| (12) | ||||
| (13) |
and are vectors containing the respective loss components at some arbitrary time point . Since is the loss function for the NN, averaged over time, can be considered the instantaneous loss at the time point when . Let be the error between the true solution and the NN solution. Expanding the Hamiltonian in a Taylor series about and keeping up to quadratic terms yields:
| (14) |
where is the Hessian matrix. Taking the gradient of Eq. (14) with respect to and rearranging terms gives,
| (15) |
We note that for Hamiltonians with quadratic dependence on , the quadratic expansion (14) is exact because higher order terms vanish. In addition, the second order in is the smallest order still large enough to not be canceled when we move to substitute Eq. (15) into Eq. (12). Nevertheless, the derivation can be extended to include higher order terms in a straightforward manner. In what follows, we drop the superscript for clarity of presentation. Substituting the Taylor series expansion (15) into (12) and invoking (3) results in,
| (16) |
Inspecting the vector DE (16) we observe that its components comprise a closed differential system for the error in each predicted trajectory . Solving this differential system with initial condition , as it is dictated by the parameterization (6), we can compute how the errors propagate in time. However, this requires knowledge of the loss components of and thus, such an analysis can be performed only after we have trained the network.
On the other hand, we can derive a bound on the size of without having exact knowledge of by constructing a worst case scenario. We want to establish a relationship between and , such that it determines when to stop the network training in order to get solutions with better than a certain accuracy. Let represent the largest instantaneous loss that the neural network will have after being trained. In the following analysis, we denote the norm by . We have,
| (17) |
where is the minimum singular value of . The last line in the above expression (17) can be obtained by considering the quantity and using the singular value decomposition on to show that . Rearranging terms leads to,
| (18) |
Solving the quadratic inequality (18) for yields,
| (19) |
Now consider a single component of the error, . The largest value can take occurs when and for . That is, for a fixed error, all of the error is concentrated in a single component. In this case, . If is maximized at a value , then at . Therefore, . Using this in (19) provides,
| (20) |
We point out that at the boundary , the error and its derivatives are exactly zero since the initial conditions are identically satisfied through the parametrization of Eq. (6). Furthermore, the assumption that all the error is concentrated at a single component implies that and are zero functions for . This strong assumption simplifies Eq. (19) yielding the upper error bound of Eq. (20).
If a NN is trained such that the loss function has a maximum value of , then the maximum error that any component of the solution can take is bounded by (20). In other words, we can choose in advance an accuracy for the solutions and use the relationship (20) to calculate the , which, therefore, will determine when we have to stop training the network ensuring the desirable accuracy. The can be calculated due to the training process since, in the most general case, it is a function of the solutions. Moreover, the expressions (16) and (20) state that depends on the general network performance and not only on the number of the time points used in the training process, which is the case of numerical integrators. That happens because the number of training points is not the only parameter that determines the value of the loss function. For example, fixing the number of the training points while increasing the number of hidden layers or neurons yields better performance that corresponds to a smaller . In summary, once the Hamiltonian NN is optimized, Eq. (16) can be used to calculate the error propagation. On the other hand, we can decide the accuracy of the solutions before the optimization by using Eq. (20) to define the that determines when to stop training the network.
III Experiments
III.1 Nonlinear Oscillator
As a concrete example, we consider the one dimensional nonlinear (an-harmonic) oscillator with Hamiltonian
| (21) |
where the natural frequency and the mass of the oscillator are considered to be unity. The Hamiltonian (21) corresponds to the total energy of the system, and the associated equations of motion read (Eq. 1):
| (22) |
In what follows, we use the symplectic NN architecture to solve the above nonlinear Hamiltonian system and compare the NN solutions with those obtained by symplectic Euler integrator. It results that the symplectic Euler method requires two orders more evaluation time points than the NN to reach the same numerical error. We also explore the efficiency of the network for different activation and parametric functions.
The phase space of the oscillator consists of two degrees of freedom with . Accordingly, we utilize a feed-forward NN with two outputs used to parametrize the approximate solutions according to Eq. (6). The loss function is defined by Eqs. (22) and according to Eq. (7) as:
| (23) |
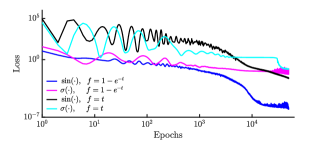
We initialize a grid with time points equally spaced in the time interval . At the beginning of each epoch, we perturb all the time points by using a random term obtained by a normal distribution with zero mean and a standard deviation of . The initial state is chosen to be , corresponding to the total initial energy ; in this energy, the motion deviates from the behavior of the simple harmonic oscillator. The NN consists of two hidden layers with neurons per hidden layer, and is being trained for epochs by using Adam optimizer [46] with a learning rate of . We perform four independent numerical experiments that correspond to different NN designs, namely for the combinations of sigmoid and trigonometric activation functions, and for the parametric functions and . Figure 2 demonstrates in logarithmic scale the loss function (23) during the training; each color represents one of the the four distinguished cases of architectures according to the legend. We highlight that the loss function of our proposed design (blue line) converges faster than the other models.
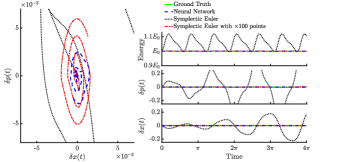
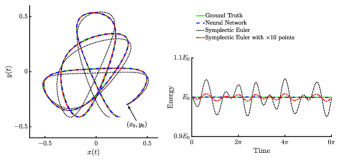
The performance of the Hamiltonian NN after its training is represented in Fig. (3) by the blue curve. In addition, we use the DEs solver odeint of the scipy python package [47] to solve the system (22) and consider the obtained numerical solutions as the ground truth. We note that the solvers provided by scipy have exemplary error control and adaptivity leading to excellent solution trajectories. For comparison purposes, we also utilize the symplectic Euler method described in Eqs. (4),(5) to solve the DEs (22), and compare the solutions with those obtained by our proposed symplectic NN. We point out that the ground truth data and the solutions obtained by symplectic Euler method are exclusively used to assess the performance of the NN predictions and never used for the NN optimization. Essentially, the Hamiltonian NN does not use any data generated by traditional numerical solvers. In Fig. 3 we present results obtained by the solver (green lines), by the NN (blue line), and by the symplectic Euler integrator (black and red). After the network optimization we get . The smallest singular value of the Hessian of Hamiltonian (21) is . Subsequently, Eq. (20) yields for both and the upper bound error . Interestingly enough, the symplectic Euler method needs time points to approach this maximum error. In the case of Euler’s method, we present in Fig. 3 two numerical solutions: one with the same time points used in the NN training (black), and a second with 100 times more points (red). The left graph in Fig. 3 demonstrates the phase space for the numerical errors where we observe that the errors in the NN’s solutions are in the same order with the error obtained by the symplectic Euler when 100 times more time points are used. On the right panel of Fig. 3 we present and and the the total energy as a function of time calculated by using the numerical solutions in the Hamiltonian (21). An important result of this exploration is that, in contrast to the Euler integrator, the NN’s solutions conserve the total energy locally. This is a consequence of the fact that the solutions obtained by the symplectic NN conserve the correct Hamiltonian rather than a perturbed one, which is the case with the symplectic integrators. Therefore, in the context of the energy conservation task, the Hamiltonian NN outperforms the symplectic Euler integrator.
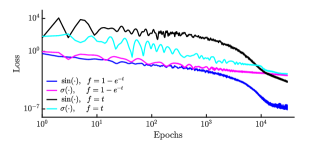
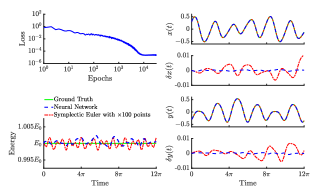
We validate the predictability of the Hamiltonian NN for long-term prediction by solving DEs in a longer time period. In particular, the system of Eqs. (22) is solved for the extended time interval using the same initial conditions from the previous simulations, namely . Although the previously used architecture provides solutions of high accuracy, we found that by using 80 neurons per hidden layer yields faster convergence in the NN optimization. Moreover, since the time interval is expanded the number of training points is increased accordingly to time points. For the long-time prediction in this case, we use the regularization loss (7) with , which penalizes violations in the energy conservation. The NN predictions are compared to solutions obtained by the symplectic Euler method using points. This represents 100 times more points than those used for the network optimization. The results of the long time solutions are presented in Fig. 4. The loss function during the training is shown by the left upper image in Fig. 4. The lower panel represents the ground truth energy (green solid line), the energy obtained by the Hamiltonian NN (dashed blue), and the energy that the symplectic Euler method (red dashed-dotted) computes. We observe that the neural network conserves the energy slightly better than the numerical integrator. The right panel of Fig. 4 is the phase-space error, similar to Fig. 3, where we observe that the error obtained by the symplectic Euler (red dashed-dotted) constantly increases in time much faster than the error that we obtain from the NN solutions. Interestingly enough, we observe that although the energy is conserved comparably well by the two approaches, the Hamiltonian NN out-performs the symplectic Euler method in terms of the accuracy of the predicted solutions. That happens because a NN solver simultaneously satisfies all the equations of DE system and conserves the original Hamiltonian, whereas, integrators conserve a perturbed Hamiltonian accumulating errors in time.

III.2 Chaotic system
We demonstrate further the efficiency of the proposed symplectic NN by solving the equations for a chaotic two-dimensional dynamical system. In particular, we solve the canonical equations for the Hénon-Heiles (HH) system [48] that describes the non-linear motion of a star around a galactic center with the motion restricted to a plane. The HH system has four degrees of freedom in the phase space where . The Hamiltonian and the total energy of this system is
| (24) |
The Hamilton’s equations results in the nonlinear DEs system:
| (25) | ||||||
| (26) |
For the HH system we are seeking approximate solutions . Accordingly, we employ a fully connected feed-forward NN with four outputs used to parametrize according to the general formula (6). The initial conditions for the numerical experiment are , corresponding to the energy . The maximal Lyapunov exponent for this set of initial conditions is , and since is positive, the motion is chaotic [49]. The network consists of two hidden layers with 50 neurons per hidden layer. An equally spaced grid of is initialized in the time interval that corresponds to 1.3 Lyapunov times. These points are used as the training set and are perturbed in the beginning of every epoch by using a random term obtained by a normal distribution with zero mean and with a standard deviation . The loss function is defined by Eqs. (25), (26), and according to Eq. (7), as
| (27) |
We examine four different network architectures similar to the nonlinear oscillator system, namely for different activation and parametric functions. The networks are trained for epochs by using Adam optimizer with learning rate . After training for long enough to ensure convergence in the loss function we find this number of epochs is sufficient to optimize the network. In Fig. 5, we show the loss function (III.2) in the training where each color corresponds to a different architectures according to the legend in the figure. Again, the choice of activation and yields the best network performance. In Fig. 6, we compare the approximated trajectories and the energy obtained by the symplectic NN (blue lines), and by a symplectic Euler integrator which is evaluated in and in time points (shown by black and red lines, respectively). Solutions obtained by a solver are considered as the ground truth (green curves). The left panel in Fig. 6 shows the orbit in the plane where the Hamiltonian NN solution is indistinguishable from the ground truth. The right panel represents the total energy in time where the NN solutions conserve the energy better than the solutions obtained by the symplectic Euler method. The symplectic Euler must use an order of magnitude higher resolution than NN to capture the correct orbit portrait, however, the energy is still not conserved locally.
We extend the integration time for the HH system to , which corresponds to Lyapunov times. For the long-time prediction we employ the regularization term of Eq. (7) with The network architecture consists of two hidden layers with 80 neurons per layer. The network optimization uses 500 time points. For the training of this model, we found that using sequential learning [29] is more efficient. First, we train the model for a short integration time range of and save the network parameters; the network is trained for epochs with a learning rate of . Then, we load the previously saved parameters and train the model in a larger domain of ] for epochs and with learning rate of . This transfer learning application enhances the learning and, therefore, the network converges faster to the solutions than starting the training from random initialized parameters. The results are demonstrated by Fig. 7 where the left upper graph indicates the loss function during the training of the Hamiltonian network. For comparison, we present the NN results in blue along with the solutions obtained by a symplectic Euler evaluated with more points than the training points. The lower plot in left panel shows the energy where we observe that both the NN (blue) and the symplectic Euler (red) conserve the correct (green) energy with a error of about the same order. The right panel of Fig. 7 represents the predictions of the position state and along with the associated numerical error denoted by and , respectively. As we observed in the nonlinear oscillator system, the solutions obtained by the NN presents lower numerical error than the symplectic integrator, although both methods conserve the energy comparably well.
IV Conclusion
In recent years, machine learning has made in-roads in traditional science and engineering fields. NNs have attracted scientists’ interest due to their outstanding capabilities in regression, classification, and prediction tasks. Since these methods are relatively new to physics, there are many physical concepts that have not been embedded yet in the structure of NNs. In this work, we proposed a physics-inspired unsupervised NN for solving DEs that describe the temporal motion of dynamical systems. The Hamiltonian formulation is embedded in the NN through the loss function and therefore, the predicted solutions conserve energy. The loss function is solely constructed by the network predictions and does not use any ground truth data. The proposed method does not use any data generated by traditional numerical solvers. Hence, the proposed Hamiltonian network provides a data-free unsupervised learning method. Although the Hamiltonian network presented in the current work is an unsupervised model, the generalizations to the proposed network could incorporate data in a semi-supervised fashion. Nevertheless, in this study we focused on the exploration of the baseline unsupervised model and leave the semi-supervised case for future work.
A smooth and bounded parametric form of solutions was introduced in this study that makes the proposed architecture a symplectic network, and subsequently, a time-invariant unit. By appropriately choosing the activation function a better domain knowledge is provided that drastically improves the network performance. Moreover, the proposed Hamiltonian architecture allows the network outputs to share their weights. Sharing the learning parameters helps the NN to discover underlying co-dependencies and subsequently, improves the network predictability in learning solutions that satisfy nonlinear systems of DEs. The Hamiltonian structure of the proposed NN allows the use of a regularization term that penalizes violation in the energy conservation law. This penalty drastically improves the network performance especially for long time solutions. The experiments presented in this work indicate that in order to get accurate solutions for larger integration times, more hidden neurons and time points are required increasing the network complexity and the computational cost. This cost can be potentially reduced by parallelizing the calculations since each time point is treated independently, however, such an implementation is not presented in this study. In the limit of very long integration times, we expect to need very large network complexity and batches of time points, thus, a parallel implementation will be crucial. An error analysis was developed in this work which can be used to analyze how the errors in the predicted solutions propagate in time. In addition, this error analysis provides a threshold in the loss function, where we can early-stop training the network when a certain accuracy occurs, namely a lower error in the predicted solutions is ensured.
There are several advantages in using NN solvers instead of traditional symplectic numerical integrators for solving DEs. The solutions obtained by a NN are continuous, smooth, and in an analytical form. Due to many outputs with shareable weights, the Hamiltonian NN discovers solutions that satisfy the Hamilton equations simultaneously and consistently. Subsequently, the NN solver conserves the correct Hamiltonian in contrary to symplectic integrators that conserve a slightly perturbed Hamiltonian. We outlined that the solutions obtained by the NN conserve the energy locally along with all the time points, and out-performs the symplectic Euler integrator that predicts an energy with a fluctuating error term. In addition to the first order Euler method, there are higher order symplectic integrators that accumulate less error than semi-implicit Euler but with a larger computational cost. Such a comparison between the proposed NN solver and higher order integrators is not presented in this study. In problems where energy conservation is crucial, the Hamiltonian NN will show better performance than symplectic integrators. Moreover, NN solvers can potentially possess advantages over state of the art integrators such as the odeint from the scipy Python package. As pointed out by [18], the calculations for a NN can be efficiently implemented on parallel architectures leading to significant speed-up. This is possible because NN solvers evaluate the time points independently. In the years since that original work of [18] appeared, hardware innovations such as GPUs have made the parallelization of NN even more accessible. On the contrary, time-parallel algorithms for traditional numerical integrators are challenging to develop and implement since the computation at a time point requires solutions at prior time points. Additionally, as the number of the differential equations in a system increases the problem of the ‘curse of dimensionality’ is observed making the numerical integrators inefficient due to the rapidly increase of the computational cost. On the other hand, it has been shown by [19, 20] that the problem of the ‘curse of dimensionality’ does not occur in neural network differential equations solvers. Subsequently, in high-dimensional problems such as many body problems, we expect the Hamiltonian NNs to out-perform regular symplectic integrators. Considering that Hamiltonian formulation provides a solid framework for theoretical extension in many areas of physics such perturbation approaches and theory of chaos, as well as statistical and quantum mechanics, the proposed Hamiltonian NN provides fertile ground on which modern research problems can potentially be handled.
Acknowledgements.
This research did not receive any specific grant from funding agencies in the public, commercial, or not-for-profit sectors. The authors would like to thank fruitful discussions with Prof. E. Lagaris, Prof. G. P. Tsironis, and Prof. E. Kaxiras.References
- [1] Bethany Lusch, J. Nathan Kutz, and Steven L. Brunton. Deep learning for universal linear embeddings of nonlinear dynamics. Nature Communications, 9, 2018.
- [2] Pantelis R. Vlachas, Wonmin Byeon, Zhong Y. Wan, Themistoklis P. Sapsis, and Petros Koumoutsakos. Data-driven forecasting of high-dimensional chaotic systems with long short-term memory networks. Proceeding of the Royal Sociaty A- Mathematical Physical and Engineering Sciences, 474(2213), 2018.
- [3] George Neofotistos, Marios Mattheakis, Georgios D. Barmparis, Johanne Hizanidis, Giorgos P. Tsironis, and Efthimios Kaxiras. Machine Learning With Observers Predicts Complex Spatiotemporal Behavior. Frontiers in Physics, 7, 2019.
- [4] Zhixin Lu, Jaideep Pathak, Brian Hunt, Michelle Girvan, Roger Brockett, and Edward Ott. Reservoir observers: Model-free inference of unmeasured variables in chaotic systems. Chaos, 27(4), 2017.
- [5] Jaideep Pathak, Brian Hunt, Michelle Girvan, Zhixin Lu, and Edward Ott. Model-free prediction of large spatiotemporally chaotic systems from data: A reservoir computing approach. Phys. Rev. Lett., 120:024102, 2018.
- [6] Gouhei Tanaka, Toshiyuki Yamane, Jean Benoit Héroux, Ryosho Nakane, Naoki Kanazawa, Seiji Takeda, Hidetoshi Numata, Daiju Nakano, and Akira Hirose. Recent advances in physical reservoir computing: A review. Neural Networks, 115:100 – 123, 2019.
- [7] Fazle Karim, Somshubra Majumdar, Houshang Darabi, and Samuel Harford. Multivariate lstm-fcns for time series classification. Neural Networks, 116:237 – 245, 2019.
- [8] Julia Ling, Reese Jones, and Jeremy Templeton. Machine learning strategies for systems with invariance properties. Journal of Computational Physics, 318:22–35, 2016.
- [9] Julia Ling, Andrew Kurzawski, and Jeremy Templeton. Reynolds averaged turbulence modelling using deep neural networks with embedded invariance. Journal of Fluid Mechanics, 807:155–166, 2016.
- [10] Rui Fang, David Sondak, Pavlos Protopapas, and Sauro Succi. Neural network models for the anisotropic reynolds stress tensor in turbulent channel flow. Journal of Turbulence, 0(0):1–19, 2019.
- [11] Karthik Duraisamy, Gianluca Iaccarino, and Heng Xiao. Turbulence Modeling in the Age of Data. Annual Review of Fluid Mechanics, 51:357–377, 2019.
- [12] Maziar Raissi, Paris Perdikaris, and George Em Karniadakis. Inferring solutions of differential equations using noisy multi-fidelity data. Journal of Computational Physics, 335:736–746, 2017.
- [13] Maziar Raissi, Paris Perdikaris, and George Em Karniadakis. Machine learning of linear differential equations using Gaussian processes. Journal of Computational Physics, 348:683–693, 2017.
- [14] Samuel H. Rudy, Steven L. Brunton, Joshua L. Proctor, and J. Nathan Kutz. Data-driven discovery of partial differential equations. Science Advances, 3(4), 2017.
- [15] J. Nathan Kutz, Samuel H. Rudy, Alessandro Alla, and Steven L. Brunton. Data-driven discovery of governing physical laws and their parametric dependencies in engineering, physics and biology. 2017 IEEE 7th International Workshop on Computational Advances in Multi-Sensor Adaptive Processing (CAMSAP), pages 1–5, 2017.
- [16] Yohai Bar-Sinai, Stephan Hoyer, Jason Hickey, and Michael P. Brenner. Learning data-driven discretizations for partial differential equations. Proceedings of the National Academy of Sciences of the United States of America, 116(31):15344–15349, 2019.
- [17] M. Raissi, P. Perdikaris, and G. E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations. Journal of Computational Physics, 378:686–707, 2019.
- [18] Isaac E. Lagaris, Aristidis Likas, and Dimitrios I. Fotiadis. Artificial neural networks for solving ordinary and partial differential equations. IEEE transactions on neural networks, 9:987–1000, 1998.
- [19] Jiequn Han, Arnulf Jentzen, and E Weinan. Solving high-dimensional partial differential equations using deep learning. Proceedings of the National Academy of Sciences of the United States of America, 115 34:8505–8510, 2017.
- [20] Justin A. Sirignano and Konstantinos Spiliopoulos. Dgm: A deep learning algorithm for solving partial differential equations. Journal of Computational Physics, 375:1339–1364, 2018.
- [21] Martin Magill, Faisal Qureshi, and Hendrick W. de Haan. Neural networks trained to solve differential equations learn general representations. In NeurIPS, 2018.
- [22] Hong Li, Qilong Zhai, and Jeff Z. Y. Chen. Neural-network-based multistate solver for a static schrödinger equation. Phys. Rev. A, 103:032405, Mar 2021.
- [23] Kurt Hornik. Approximation capabilities of multilayer feedforward networks. Neural Networks, 4:251–257, 1991.
- [24] George Em Karniadakis, Ioannis G. Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang. Physics-informed machine learning. Nature Review Physics, 2021.
- [25] Sifan Wang and Paris Perdikaris. Deep learning of free boundary and stefan problems. Journal of Computational Physics, 428:109914, 2021.
- [26] Ehsan Kharazmi, Min Cai, Xiaoning Zheng, Zhen Zhang, Guang Lin, and George Em Karniadakis. Identifiability and predictability of integer- and fractional-order epidemiological models using physics-informed neural networks. Nature Computational Science, 1:744, 2018.
- [27] Modeling the effect of the vaccination campaign on the covid-19 pandemic. Chaos, Solitons Fractals, 154:111621, 2022.
- [28] Zongyi Li, Nikola Kovachki, Kamyar Azizzadenesheli, Burigede Liu, Kaushik Bhattacharya, Andrew Stuart, and Anima Anandkumar. Fourier neural operator for parametric partial differential equations. In ICLR, 2021.
- [29] Aditi S. Krishnapriyan, Amir Gholami, Shandian Zhe, Robert M. Kirby, and Michael W. Mahoney. Characterizing possible failure modes in physics-informed neural networks. In NeurIPS, 2021.
- [30] Martin J. Gander. 50 years of time parallel time integration. In in Multiple Shooting and Time Domain Decomposition, pages 69–114. Springer, 2015.
- [31] Stefanie Gunther, Lars Ruthotto, Jacob B. Schroder, Eric C. Cyr, and Nicolas R. Gauger. Layer-parallel training of deep residual neural networks. SIAM Journal on Mathematics of Data Science, 2:1–23, 2020.
- [32] Sam Greydanus, Misko Dzamba, and Jason Yosinski. Hamiltonian neural networks. In Advances in Neural Information Processing Systems 32, pages 15379–15389. Curran Associates, Inc., 2019.
- [33] Tom Bertalan, Felix Dietrich, Igor Mezic, and Ioannis G. Kevrekidis. On learning hamiltonian systems from data. Chaos: An Interdisciplinary Journal of Nonlinear Science, 29(12):121107, 2019.
- [34] Anshul Choudhary, John F. Lindner, Elliott G. Holliday, Scott T. Miller, Sudeshna Sinha, and William L. Ditto. Physics-enhanced neural networks learn order and chaos. Phys. Rev. E, 101:062207, Jun 2020.
- [35] Shaan A. Desai, Marios Mattheakis, and Stephen J. Roberts. Variational integrator graph networks for learning energy-conserving dynamical systems. Phys. Rev. E, 104:035310, 2021.
- [36] Chen-Di Han, Bryan Glaz, Mulugeta Haile, and Ying-Cheng Lai. Adaptable hamiltonian neural networks. Phys. Rev. Research, 3:023156, 2021.
- [37] Han Zhang, Huawei Fan, Liang Wang, and Xingang Wang. Learning hamiltonian dynamics with reservoir computing. Phys. Rev. E, 104:024205, 2021.
- [38] Alvaro Sanchez-Gonzalez, Victor Bapst, Kyle Cranmer, and Peter Battaglia. Hamiltonian Graph Networks with ODE Integrators. arXiv:1909.12790 [physics], 2019. arXiv: 1909.12790.
- [39] Peter Toth, Danilo Jimenez Rezende, Andrew Jaegle, Sebastien Racaniere, Aleksandar Botev, and Irina Higgins. Hamiltonian generative networks. In International Conference on Learning Representations, 2020.
- [40] Shaan A. Desai, Marios Mattheakis, David Sondak, Pavlos Protopapas, and Stephen J. Roberts. Port-hamiltonian neural networks for learning explicit time-dependent dynamical systems. Phys. Rev. E, 104:034312, 2021.
- [41] Adam Paszke, Sam Gross, Soumith Chintala, Gregory Chanan, Edward Yang, Zachary Devito, Zeming Lin, Alban Desmaison, Luca Antiga, and Adam Lerer. Automatic differentiation in pytorch. In NeurIPS, 2017.
- [42] https://github.com/mariosmat/hamiltonianNNetODEs.
- [43] Emmy Noether. Invariante variationsprobleme. Math. Phys. Klasse, 2:235 – 257, 1918.
- [44] Benedict J Leimkuhler and Robert D Skeel. Symplectic numerical integrators in constrained hamiltonian systems. Journal of Computational Physics, 112(1):117–125, 1994.
- [45] Liu Ziyin, Tilman Hartwig, and Masahito Ueda. Neural networks fail to learn periodic functions and how to fix it. ArXiv, 2006.08195, 2020.
- [46] Diederik P. Kingma and Jimmy Ba. Adam: A method for stochastic optimization. CoRR, abs/1412.6980, 2014.
- [47] Travis E. Oliphant. Python for scientific computing. Computing in Science & Engineering, 9, 2007.
- [48] Michel Hénon and Carl Heiles. The applicability of the third integral of motion: Some numerical experiments. The Astronomical Journal, 69:73–79, 1964.
- [49] I. I. Shevchenko and A. V. Mel’Nikov. Lyapunov exponents in the hénon-heiles problem. JETP Letters, 77(12):642–646, 12 2003.