BEVDepth: Acquisition of Reliable Depth for Multi-view 3D Object Detection
Abstract
In this research, we propose a new 3D object detector with a trustworthy depth estimation, dubbed BEVDepth, for camera-based Bird’s-Eye-View (BEV) 3D object detection. Our work is based on a key observation – depth estimation in recent approaches is surprisingly inadequate given the fact that depth is essential to camera 3D detection. Our BEVDepth resolves this by leveraging explicit depth supervision. A camera-awareness depth estimation module is also introduced to facilitate the depth predicting capability. Besides, we design a novel Depth Refinement Module to counter the side effects carried by imprecise feature unprojection. Aided by customized Efficient Voxel Pooling and multi-frame mechanism, BEVDepth achieves the new state-of-the-art 60.9% NDS on the challenging nuScenes test set while maintaining high efficiency. For the first time, the NDS score of a camera model reaches 60%. Code is released at https://github.com/Megvii-BaseDetection/BEVDepth.
1 Introduction
LiDAR and camera are the two main sensors used by the current autonomous systems to detect 3D objects and perceive the environment. While LiDAR-based methods have demonstrated their ability to deliver trustworthy 3D detection results, multi-view camera-based methods have recently attracted increasing attention because of their lower cost.
The feasibility of using multi-view cameras for 3D perception has been well addressed in LSS (Philion and Fidler 2020). They first “lift” multi-view features to 3D frustums using estimated depth, then “splat” frustums onto a reference plane, usually being a plane in Bird’s-Eye-View (BEV). The BEV representation is non-trivial since it not only enables an end-to-end training scheme of a multiple input cameras system but also provides a unified space for various downstream tasks such as BEV segmentation, object detection (Huang et al. 2021; Li et al. 2022b) and motion planning. However, despite the success of LSS-based perception algorithms, the learned depth within this pipeline is barely studied. We ask – does the quality of learned depth within these detectors really meet the requirement for precise 3D object detection?
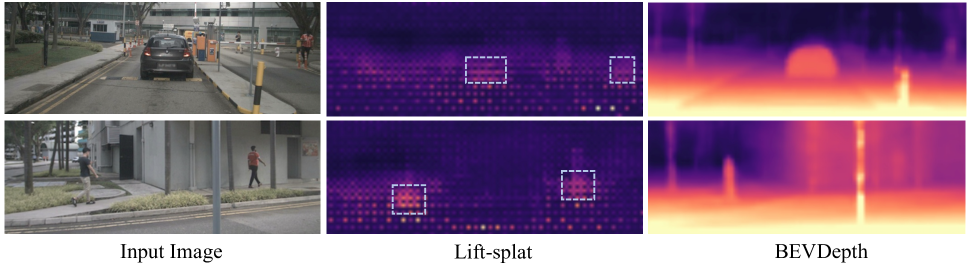
We attempt to answer this question qualitatively first by visualizing the estimated depth (Fig. 1) in a Lift-splat based detector. Even though the detector achieves 30 mAP on nuScenes (Caesar et al. 2020) benchmark, its depth are surprisingly poor. Only a few region of features predict reasonable depth and contribute to subsequent tasks (see dashed boxes in Fig. 1), while most other regions do not. Based on this observation, we point out that the depth learning mechanism in existing Lift-splat brings three deficiencies:
-
•
Inaccurate Depth Since the depth prediction module is indirectly supervised by the final detection loss, the absolute depth quality is far from satisfying;
-
•
Depth Module Over-fitting Most pixels can not predict reasonable depth, meaning that they are not properly trained during the learning stage. It makes us doubt about depth module’s generalizing ability.
-
•
Imprecise BEV Semantics The learned depth in Lift-splat unprojects image features into 3D frustum features, which will be further pooled into BEV features. With a poor depth like in Lift-splat, only part of features are unprojected to correct BEV positions, resulting in imprecise BEV semantics.
We will dive deep into these three deficiencies in Sec. 3.
Moreover, we reveal the great potential of improving depth by replacing the learned depth in Lift-splat with its ground-truth generated from point cloud data. As a result, mAP and NDS are both boosted by nearly 20%. The translation error (mATE) decreases as well, from 0.768 to 0.393. Such a phenomenon clearly reveals that enhancing depth is the key to high-performance camera 3D detection.
Therefore, in this work, we introduce BEVDepth, a new multi-view 3D detector that leverages depth supervision derives from point clouds to guide depth learning. We are the first team that presents a thorough analysis of how the depth quality affects the overall system. Meanwhile, we innovatively propose to encode camera intrinsics and extrinsics into a depth learning module so that the detector is robust to various camera settings. In the end, a Depth Refinement Module is further introduced to refine the learned depth.
To validate the power of BEVDepth, we test it on nuScenes (Caesar et al. 2020) dataset – a well-known benchmark in the field of 3D detection. Aided by our customized Efficient Voxel Pooling and Multi-frame Fusion technique, BEVDepth achieves 60.9% NDS on the nuScenes test set, being the new state-of-the-art on this challenging benchmark while still maintaining high efficiency.
2 Related Work
2.1 Vision-based 3D object detection
The goal of vision-based 3D detection is to predict the 3D bounding boxes of objects. It is an ill-posed problem because estimating the depth of objects from monocular images is inherently ambiguous. Even when multi-view cameras are available, estimating depth in areas without overlapping views remains challenging. Therefore, depth modeling is a critical component of vision-based 3D detection. One branch of research predicts 3D bounding boxes directly from 2D image features. 2D detectors, such as CenterNet (Zhou, Wang, and Krähenbühl 2019), can be used for 3D detection with minor changes to detection heads. M3D-RPN (Brazil and Liu 2019) proposes depth-aware convolutional layers to enhance spatial awareness. D4LCN (Huo et al. 2020) employs depth maps to guide dynamic kernel learning. By converting 3D targets into the image domain, FCOS3D (Wang et al. 2021b) predicts 2D and 3D attributes of objects. Further, PGD (Wang et al. 2022a) presents geometric relation graphs to facilitate depth estimation for 3D object detection. DD3D (Park et al. 2021a) demonstrates that depth pre-training can significantly improve end-to-end 3D detection.
Another line of work predicts objects in 3D space. There are many ways to convert 2D image features into 3D space. One typical approach is transforming image-based depth maps to pseudo-LiDAR to mimic the LiDAR signal (Wang et al. 2019; You et al. 2019; Qian et al. 2020). Image features can also be used to generate 3D voxels (Rukhovich, Vorontsova, and Konushin 2022) or orthographic feature maps (Roddick, Kendall, and Cipolla 2018). LSS (Philion and Fidler 2020) proposes a view transform method that explicitly predicts depth distribution and projects image features onto a bird’s-eye view (BEV), which has been proved practical for 3D object detection (Reading et al. 2021; Huang et al. 2021; Huang and Huang 2022). BEVFormer (Li et al. 2022b) performs 2D-to-3D transformation with local attention and grid-shaped BEV queries. Following DETR (Carion et al. 2020), DETR3D (Wang et al. 2022b) detects 3D objects with transformers and object queries, and PETR (Liu et al. 2022a) improves performance further by introducing 3D position-aware representations.
2.2 LiDAR-based 3D object detection
Due to the accuracy of depth estimation, LiDAR-based 3D detection methods are frequently employed in autonomous driving perception tasks. VoxelNet (Zhou and Tuzel 2018) voxelizes the point cloud, converting it from sparse to dense voxels, and then proposes bounding boxes in dense space to aid the index during convolution. SECOND (Yan, Mao, and Li 2018) increases performance on the KITTI dataset (Geiger, Lenz, and Urtasun 2012) by introducing a more effective structure and gt-sampling technique based on VoxelNet (Zhou and Tuzel 2018). Sparse convolution is also used in SECOND (Yan, Mao, and Li 2018) to boost speed. PointPillars (Lang et al. 2019) encodes point clouds using pillars rather than 3D convolution processes, making it fast but maintaining good performance. CenterPoint (Yin, Zhou, and Krahenbuhl 2021) proposes an anchor-free detector that extends CenterNet (Zhou, Wang, and Krähenbühl 2019) to 3D space and achieves high performance on nuScenes dataset (Caesar et al. 2020) and Waymo open dataset (Sun et al. 2020). PointRCNN (Shi, Wang, and Li 2019), unlike the grid-based approaches discussed above, creates proposals directly from point clouds. It then employs LiDAR segmentation to identify foreground points for proposals and produce bounding boxes in the second stage. (Qi et al. 2019; Yang et al. 2022) use Hough voting to collect point features and then propose bounding boxes from clusters. Because of its dense feature representation, grid-based approaches are faster, but they lose information from raw point clouds, whereas point-based methods can connect raw point clouds but are inefficient when locating neighbors for each point. PV-RCNN (Shi et al. 2020) is proposed to preserve efficiency while allowing adjustable receptive fields for point features.
2.3 Depth Estimation
Depth prediction is critical for monocular image interpretation. Fu et al. (Fu et al. 2018) employ a regression method to predict the depth of an image using dilated convolution and a scene understanding module. Monodepth (Godard, Mac Aodha, and Brostow 2017) predicts depth without supervision using disparity and reconstruction. Monodepth2 (Godard et al. 2019) uses a combination of depth estimation and pose estimation networks to forecast depth in a single frame.
Some approaches predict depth by constructing cost-volume. MVSNet (Yao et al. 2018) first introduces cost-volume to the field of depth estimation. Based on MVSNet, RMVSNet (Yao et al. 2019) uses GRU to reduce memory cost, MVSCRF (Xue et al. 2019) adds CRF module, Cascade MVSNet (Gu et al. 2020) changes MVSNet to cascade structure. Wang et al. (Wang et al. 2021a) generate depth prediction using multi-scale fusion and introduce adaptive modules which improve performance and reduce memory consumption at the same time. Bae et al. (Bae, Budvytis, and Cipolla 2022) fuse single-view images with multi-view images and introduce depth-sampling to reduce the cost of computation.
3 Delving into Depth Prediction in Lift-splat
In Sec. 1, we show that a LSS-based detector with surprisingly poor depth can still obtain reasonable 3D detection results. In this section, we first review the overall structure of our baseline 3D detector built on Lift-splat. Then we conduct a simple experiment on our base detector to reveal why we observe the previous phenomenon. Finally, we discuss three deficiencies carried by this detector and point out a potential solution to it.
| mAP | mATE | NDS | |
|---|---|---|---|
| learned | 0.282 | 0.768 | 0.327 |
| random soft | 0.245 | 0.838 | 0.290 |
| random hard | 0.176 | 0.922 | 0.224 |
| ground truth | 0.470 | 0.393 | 0.515 |
3.1 Model Architecture for Base Detector
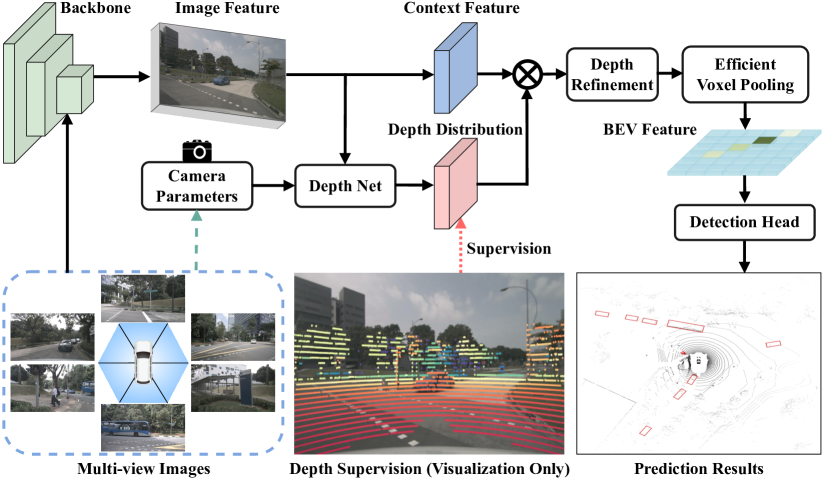
Our vanilla Lift-splat based detector simply replaces the segmentation head in LSS (Philion and Fidler 2020) with CenterPoint (Yin, Zhou, and Krahenbuhl 2021) head for 3D detection. Specifically, it consists of four main components shown in Fig. 4. 1) An Image Encoder (e.g., ResNet (He et al. 2016)) that extracts 2D features from view input images , where , and stand for feature’s height, width and channel number; 2) A DepthNet that estimates images depth from image features , where stands for the number of depth bins; 3) A View Transformer that projects in 3D representations using Eq. 1 then pools them into an integrated BEV representation ; 4) A 3D Detection Head predicting the class, 3D box offset and other attributes.
| (1) |
3.2 Making Lift-splat work is easy
The learned depth is believed essential since it is used to build the BEV representation for subsequent tasks. However, the poor visualization results in Fig. 1 contradict this consensus. In Sec. 1, we attribute the success of Lift-splat to partially reasonable learned depth. Now, we take a step further to study the essence of this pipeline by replacing with a random initialized tensor and freezing it during both the training and testing phases. Results are shown in Table 1. We are surprised to find that mAP only drops 3.7% (from 28.2% to 24.5%) after replacing with randomized soft values. We hypothesize that even if the depth used for unprojecting features is catastrophically broken, the soft nature of depth distribution still helps unproject to the right depth position to some extent, and thus obtains a reasonable mAP, nevertheless it simultaneously unprojects much non-negligible noise. We further replace the soft randomized depth with a hard randomized depth (one-hot activation at each position) and observe a greater drop by 6.9%, verifying our assumption. This demonstrates that as long as the depth at the correct position has activation, the detection head can work. It also explains why the learned depth is poor in most areas in Fig. 1, but the detection mAP is still reasonable.
| Region | DL | SILog | AbsRel | SqRel | RMSE |
|---|---|---|---|---|---|
| All | 54.58 | 3.03 | 85.11 | 19.45 | |
| ✓ | 27.62 | 0.23 | 2.09 | 5.78 | |
| Best | 27.87 | 0.38 | 6.96 | 8.29 | |
| ✓ | 14.12 | 0.10 | 1.04 | 4.55 |
3.3 Making Lift-splat work well is hard
Although obtaining reasonable results, the existing performance is far from satisfying. In this part, we reveal three deficiencies in the existing working mechanism of Lift-splat, including inaccurate depth, depth module over-fitting and imprecise BEV semantics. To demonstrate our idea more clearly, we compare two baselines – one is the naive LSS-based detector, named Base Detector, and another one utilizes extra depth supervision derives from the point clouds data on , which will be described in detail in Sec. 4. We name it Enhanced Detector.
Inaccurate depth
In Base Detector, the gradients on the depth module derives from the detection loss, which is indirect. It is natural to study the quality of learned depth. Therefore, We evaluate the learned depth on nuScenes val using the commonly used depth estimation metric (Eigen, Puhrsch, and Fergus 2014) including scale invariant logarithmic error (SILog), mean absolute relative error (Abs Rel), mean squared relative error (Sq Rel) and root mean squared error (RMSE). We evaluate two detectors under two different protocols: 1) all pixels for each object and 2) the best-predicted pixel for each object. Results are shown in Table 2. When evaluating all foreground regions, the Base Detector only achieves 3.03 AbsRel, which is greatly poor than existing depth estimation algorithms (Li et al. 2022a; Bhat, Alhashim, and Wonka 2021). However, as for Enhanced Detector, the AbsRel is largely reduced from 3.03 to 0.23, which becomes a more reasonable value. It is worth mentioning that performance of Base Detector under the best matching protocol is almost comparable to the Enhanced Detector under all-region protocol. This verifies our assumption in Sec. 1 that when a detector is trained without depth loss (just like Lift-splat), it detects objects by only learning partial depth. After applying depth loss on the best matching protocol, the learned depth is further improved. All of these results demonstrate that the implicitly learned depth is inaccurate and is far from satisfying.
Depth Module Over-fitting
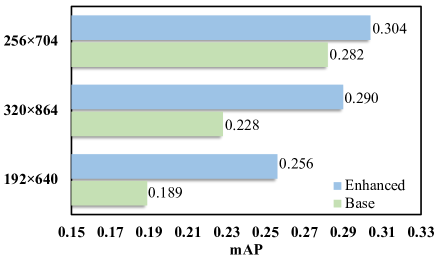
As we stated in the previous content, the Base Detector only learns to predict depth in partial regions. Most pixels are not trained to predict reasonable depth, which raises our concern about the depth module’s generalizing ability. Concretely, the detector learning depth in that way could be very sensitive to hyper-parameters such as image sizes, camera parameters, etc. To verify this, we choose “image size” as the variable, and conduct the following experiment to study the model’s generalizing ability: we first train the Base Detector and the Enhanced Detector using input size 256704. Then we test them using 192640, 256704 and 320864 sizes, respectively. As we can see in Fig. 2, the Base Detector loses more accuracy when testing image size is inconsistent with the training image size. The performance loss for Enhance Detector is much less. Such a phenomenon implies that the model without depth loss has a higher risk of over-fitting, and thus it may also be sensitive to the noise in camera intrinsics, extrinsics, or other hyper-parameters.
Imprecise BEV Semantics
Once image features are unprojected to frustum features using learned depth, a Voxel/Pillar Pooling operation is adopted to aggregate them to BEV. Fig. 3 shows that image features are not properly unprojected without depth supervision. Therefore, the pooling operation only aggregates part of semantic information. The Enhanced Detector performs better in this scenario. We hypothesize that the poor depth is harmful to the classification task. Then we use the classification heatmaps from both models and evaluate their TP / (TP + FN) as an indicator for comparison, where a TP represents an anchor point/feature which is assigned as the positive sample and is correctly classified by the CenterPoint head while FN represents the opposite meaning. See Table 3, the Enhanced Detector consistently outperforms the other one under different positive thresholds, which verifies our assumption.
Driven by the above analysis, we realize the necessity of endowing a better depth in multi-view 3D detectors, and propose our solution to it – BEVDepth.

| Method | th=0.3 | th=0.5 | th=0.7 |
|---|---|---|---|
| Base Detector | 42.28% | 18.36% | 5.12% |
| Enhanced Detector | 45.23% | 22.47% | 8.20% |
4 BEVDepth
BEVDepth is a new multi-view 3D detector with reliable depth. It leverages Explicit Depth Supervision on a Camera-aware Depth Prediction Module (DepthNet) with a novel Depth Refinement Module on unprojected frustum features to achieve this.
Explicit Depth Supervision
In Base Detector, the only supervision of the depth module comes from the detection loss. However, due to the difficulty of monocular depth estimation, a sole detection loss is far from enough to supervise the depth module. Therefore, we propose to supervise the intermediate depth prediction using ground-truth derived from point clouds data . Denote and as the rotation and translation matrix from the LiDAR coordinate to the camera coordinate of the view, and denote as the camera’s intrinsic parameter. To obtain , we first calculate:
| (2) |
which can be further converted to 2.5D image coordinates , where and denote coordinates in pixel coordinate. If the 2.5D projection of a certain point cloud does not fall into the view, we simply discard it. See Fig. 4 for an example of the projection result. Then, to align the shape between the projected point clouds and the predicted depth, a min pooling and a one hot are adopted on . We jointly define these two operations as , the resulting can thus be written in Eq. 3. As for the depth loss , we simply adopt Binary Cross Entropy.
| (3) |
Camera-aware Depth Prediction
According to the classic Camera Model, estimating depth is associated with the camera intrinsics, implying that it is non-trivial to model the camera intrinsics into DepthNet. This is especially important in multi-view 3D datasets when cameras may have different FOVs (e.g., nuScenes Dataset). Therefore, we propose to utilize the camera intrinsics as one of the inputs for DepthNet. Concretly, the dimension for camera intrinsics is first scaled up to the features using an MLP layer. Then, they are used to re-weight the image feature with an Squeeze-and-Excitation (Hu, Shen, and Sun 2018) module. Finally, we concatenate the camera extrinsics to its intrinsics to help DepthNet aware of ’s spatial location in the ego coordinate system. Denote as the original DepthNet, the overall Camera-awareness depth prediction can be written in:
| (4) |
where denotes the Flatten operation. An existing work (Park et al. 2021b) also leverages camera-awareness. They scale the regression targets according to cameras’ intrinsics, making their method hard to adapt to automated systems with complex camera setups. Our method, on the other hand, models the cameras’ parameters inside of the DepthNet, aiming at improving the intermediate depths’ quality. Benefiting from the decoupled nature of LSS (Philion and Fidler 2020), the camera-aware depth prediction module is isolated from the detection head and thus the regression target, in this case, does not need to be changed, resulting in greater extensibility.
Depth Refinement Module
To further enhance the depth quality, we design a novel Depth Refinement Module. Specifically, we first reshape from to , and stack several 33 convolution layer on the plane. Its output is finally reshaped back and fed into the subsequent Voxel/Pillar Pooling operation. On one hand, the Depth Refinement Module can aggregate features along the depth axis while the depth prediction confidence is low. One the other hand, when the depth prediction is inaccurate, the Depth Refinement Module is able to refine it to the correct position theoretically, as long as the receptive field is large enough. In a word, the Depth Refinement Module endows a rectification mechanism to the View Transformer stage, making it able to refine those improperly placed features.
5 Experiment
In this section, we first introduce our experimental setups. Then, comprehensive experiments are conducted on BEVDepth to validate the effects of our proposed components. Comparisons with other leading camera 3D detection models are presented in the end.
| DL | CA | DR | MF | mAP | mATE | mAOE | NDS |
|---|---|---|---|---|---|---|---|
| 0.282 | 0.768 | 0.698 | 0.327 | ||||
| ✓ | 0.304 | 0.747 | 0.671 | 0.344 | |||
| ✓ | ✓ | 0.314 | 0.706 | 0.647 | 0.357 | ||
| ✓ | ✓ | ✓ | 0.322 | 0.707 | 0.636 | 0.367 | |
| ✓ | ✓ | ✓ | ✓ | 0.330 | 0.699 | 0.545 | 0.442 |
| BCE | L1 | mAP | mATE | mAOE | NDS |
|---|---|---|---|---|---|
| ✓ | 0.322 | 0.707 | 0.636 | 0.367 | |
| ✓ | 0.321 | 0.703 | 0.629 | 0.371 | |
| ✓ | ✓ | 0.323 | 0.706 | 0.608 | 0.372 |
5.1 Experimental Setup
Dataset and Metrics
nuScenes (Caesar et al. 2020) dataset is a large-scale autonomous driving benchmark containing data from six cameras, one LiDAR, and five radars. There are 1000 scenarios in the dataset, which are divided into 700, 150, and 150 scenes for training, validation, and testing, respectively. For 3D detection task, we report nuScenes Detection Score (NDS), mean Average Precision (mAP), as well as five True Positive (TP) metrics including mean Average Translation Error (mATE), mean Average Scale Error (mASE), mean Average Orientation Error (mAOE), mean Average Velocity Error (mAVE), mean Average Attribute Error (mAAE).
Implementation Details
Unless otherwise specified, we use ResNet-50 (He et al. 2016) as the image backbone and the image size is processed to 256704. Following (Huang et al. 2021), we adopt image data augmentations including random cropping, random scaling, random flipping, and random rotation, and also adopt BEV data augmentations including random scaling, random flipping, and random rotation. We use AdamW (Loshchilov and Hutter 2017) as an optimizer with a learning rate set to 2e-4 and batch size set to 64. For the ablation study, all experiments are trained for 24 epochs without using CBGS strategy (Zhu et al. 2019). When compared to other methods, BEVDepth is trained for 20 epochs with CBGS. Camera-aware DepthNet is placed at the feature level with stride 16.
5.2 Ablation Study
Component Analysis
As shown in Table 4, our vanilla BEVDepth achieves 28.2% mAP and 32.7% NDS. Adding Depth Loss improves mAP by 2.2% which is consistent with our analysis – Depth Loss is beneficial to classification. mATE marginally reduces 0.21, since the naive BEVDepth already learns to predict depth partially with the help of detection loss. Modeling camera parameters into DepthNet further reduces mATE by 0.41, revealing the importance of camera awareness. In the end, Depth Refinement Module improves 0.8% mAP. We hypothesize that Depth Refinement Module makes features along the depth axis more compact, and thus is beneficial to reducing false response. Overall, our BEVDepth improves 4.0% mAP and 4.0% NDS compared to its baseline, showing the effectiveness of our innovations.
| mAP | mATE | mAOE | NDS | |
|---|---|---|---|---|
| - | 0.314 | 0.706 | 0.647 | 0.357 |
| 13 | 0.315 | 0.703 | 0.650 | 0.357 |
| 31 | 0.320 | 0.695 | 0.624 | 0.369 |
| 33 | 0.322 | 0.707 | 0.636 | 0.367 |
| Method | Resolution | mAP | NDS |
|---|---|---|---|
| FCOS3D | 9001600 | 0.295 | 0.372 |
| DETR3D | 9001600 | 0.303 | 0.374 |
| BEVDet-R50 | 256704 | 0.286 | 0.372 |
| BEVDet-Tiny | 5121408 | 0.349 | 0.417 |
| PETR-R50-DCN | 3841056 | 0.313 | 0.381 |
| PETR-R101-DCN | 5121408 | 0.357 | 0.421 |
| PETR-Tiny | 5121408 | 0.361 | 0.431 |
| BEVDet4D-Tiny | 256704 | 0.323 | 0.453 |
| BEVDet4D-Base | 6401600 | 0.390 | 0.515 |
| BEVFormer-S | - | 0.375 | 0.448 |
| BEVFormer-R101-DCN | 9001600 | 0.416 | 0.517 |
| BEVDepth-R50 | 256704 | 0.351 | 0.475 |
| BEVDepth-R101 | 5121408 | 0.412 | 0.535 |
| BEVDepth-R101-DCN | 5121408 | 0.418 | 0.538 |
| Method | Modality | mAP | mATE | mASE | mAOE | mAVE | mAAE | NDS |
|---|---|---|---|---|---|---|---|---|
| CenterPoint | L | 0.564 | - | - | - | - | - | 0.648 |
| FCOS3D (Wang et al. 2021b) | C | 0.358 | 0.690 | 0.249 | 0.452 | 1.434 | 0.124 | 0.428 |
| DETR3D (Wang et al. 2022b) | C | 0.412 | 0.641 | 0.255 | 0.394 | 0.845 | 0.133 | 0.479 |
| BEVDet-Pure (Huang et al. 2021) | C | 0.398 | 0.556 | 0.239 | 0.414 | 1.010 | 0.153 | 0.463 |
| BEVDet-Beta | C | 0.422 | 0.529 | 0.236 | 0.396 | 0.979 | 0.152 | 0.482 |
| PETR (Liu et al. 2022a) | C | 0.434 | 0.641 | 0.248 | 0.437 | 0.894 | 0.143 | 0.481 |
| PETR-e | C | 0.441 | 0.593 | 0.249 | 0.384 | 0.808 | 0.132 | 0.504 |
| BEVDet4D (Huang and Huang 2022) | C | 0.451 | 0.511 | 0.241 | 0.386 | 0.301 | 0.121 | 0.569 |
| BEVFormer (Li et al. 2022b) | C | 0.481 | 0.582 | 0.256 | 0.375 | 0.378 | 0.126 | 0.569 |
| PETRv2 (Liu et al. 2022b) | C | 0.490 | 0.561 | 0.243 | 0.361 | 0.343 | 0.120 | 0.582 |
| BEVDepth | C | 0.503 | 0.445 | 0.245 | 0.378 | 0.320 | 0.126 | 0.600 |
| BEVDepth† | C | 0.520 | 0.445 | 0.243 | 0.352 | 0.347 | 0.127 | 0.609 |
Depth Loss
In the field of depth estimation, BCE and L1Loss are two common losses. In this part, we ablate the effect of using these two different losses in DepthNet (see Table 5), and find that different depth losses barely affect the final detection performance.
Depth Refinement Module
In Sec. 3, we mention that Depth Refinement Module is designed to refine unsatisfactory depth by aggregating/refining the unprojected features along the depth axis. In terms of efficiency, we originally adopt 33 convolution in it. Here we ablate different kernels including 13, 31 and 33 to study its mechanism. See Table 6, when we use 13 conv on dimension, the information does not exchange along the depth axis, and the detection performance is barely affected. When we use 31 conv, features are allowed to interact along the depth axis, mAP and NDS are correspondingly improved. This is similar to using naive conv, which reveals the nature of this module.
5.3 Benchmark Results
Here we briefly introduce two extra implementations that are crucial to obtain our performance on the nuScenes leardboard, i.e., Efficient Voxel Pooling and Multi-frame Fusion.
Efficient Voxel Pooling
Existing Voxel Pooling in Lift-splat leverages a “cumsum trick” that involves a “sorting” and a “cumulative sum” operations. Both operations are computationally inefficient. We propose to utilize great parallelism of GPU by assigning each frustum feature a CUDA thread that is used to add the feature to its corresponding BEV grid. As a result, the training time of our state-of-the-art model is reduced from 5 days to 1.5 days. The sole pooling operation is 80 faster than its baseline in Lift-splat.
Multi-frame Fusion
Multi-frame Fusion helps better detect objects and endows model ability to estimate velocity. We align the coordinates of frustum features from different frames into the current ego coordinate system to eliminate the effect of ego-motion and then perform Voxel Pooling. The pooled BEV features from different frames are directly concatenated and fed to following tasks.
nuScenes val set
We compare the proposed BEVDepth with other state-of-the-art methods like FCOS3D, DETR3D, BEVDet, PETR, BEVDet4D and BEVFormer on nuScenes val set. We don’t adopt test time augmentation. As can be seen from Table 7, BEVDepth shows superior performance in NDS (a key metric of nuScenes dataset), which improves 2% over 2nd place, respectively. BEVDepth is also comparable with BEVFormer in mAP given the fact that they use stronger backbone and larger resolution input images. Using 256704 resolution input images, BEVDepth exceeds BEVDet on ResNet-50 by 10% in NDS. BEVDepth also exceeds BEVDet4D-Tiny and BEVFormer-S by 2% in NDS. When using 5121408 resolution input images, BEVDepth exceeds PETR on ResNet-101 6% in mAP and 11% in NDS. BEVDepth also exceeds BEVDET4D-Base 2% in mAP and 2% in NDS although their backbones are usually better than us.
nuScenes test set
For the submitted results on the test set, we use the train set and val set for training. The result we submitted is a single model with test time augmentation. As listed in Table 8, BEVDepth ranks first on the nuScenes camera 3D objection leaderboard with a score of 50.3% mAP and 60.0% NDS. On mAP, we outperform the 2nd method PETRv2 by 1.3%. On mATE, a key metric reflecting depth localization accuracy which is closely correlated to depth, we outperform PETRv2 by 11.6%. On NDS, we surpass the second place by 1.8%, and on other metrics, we remain at or on par with the best methods of the past. When switching the backbone to ConvNeXT, BEVDepth reaches 60.9% NDS without extra data.
6 Conclusion
In this paper, a novel network architecture, namely BEVDepth, is proposed for accurate depth prediction for 3D object detection. We first study the working mechanism in existing 3D object detectors and reveal the unreliable depth in them. To address this, we introduce Camera-awareness Depth Prediction and Depth Refinement module with Explicit Depth Supervision in BEVDepth, making it able to generate robust depth prediction. BEVDepth obtains the capability to predict the trustworthy depth and obtains remarkable improvement compared to existing multi-view 3D detectors. Moreover, BEVDepth achieves the new state-of-the-art on nuScenes leaderboard with the help of Multi-frame Fusion schema and Efficient Voxel Pooling. We hope BEVDepth can serve as a strong baseline for future research in multi-view 3D object detection.
References
- Bae, Budvytis, and Cipolla (2022) Bae, G.; Budvytis, I.; and Cipolla, R. 2022. Multi-View Depth Estimation by Fusing Single-View Depth Probability with Multi-View Geometry. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2842–2851.
- Bhat, Alhashim, and Wonka (2021) Bhat, S. F.; Alhashim, I.; and Wonka, P. 2021. Adabins: Depth estimation using adaptive bins. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 4009–4018.
- Brazil and Liu (2019) Brazil, G.; and Liu, X. 2019. M3d-rpn: Monocular 3d region proposal network for object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, 9287–9296.
- Caesar et al. (2020) Caesar, H.; Bankiti, V.; Lang, A. H.; Vora, S.; Liong, V. E.; Xu, Q.; Krishnan, A.; Pan, Y.; Baldan, G.; and Beijbom, O. 2020. nuscenes: A multimodal dataset for autonomous driving. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 11621–11631.
- Carion et al. (2020) Carion, N.; Massa, F.; Synnaeve, G.; Usunier, N.; Kirillov, A.; and Zagoruyko, S. 2020. End-to-end object detection with transformers. In European conference on computer vision, 213–229. Springer.
- Eigen, Puhrsch, and Fergus (2014) Eigen, D.; Puhrsch, C.; and Fergus, R. 2014. Depth map prediction from a single image using a multi-scale deep network. Advances in neural information processing systems, 27.
- Fu et al. (2018) Fu, H.; Gong, M.; Wang, C.; Batmanghelich, K.; and Tao, D. 2018. Deep ordinal regression network for monocular depth estimation. In Proceedings of the IEEE conference on computer vision and pattern recognition, 2002–2011.
- Geiger, Lenz, and Urtasun (2012) Geiger, A.; Lenz, P.; and Urtasun, R. 2012. Are we ready for autonomous driving? the kitti vision benchmark suite. In 2012 IEEE conference on computer vision and pattern recognition, 3354–3361. IEEE.
- Godard, Mac Aodha, and Brostow (2017) Godard, C.; Mac Aodha, O.; and Brostow, G. J. 2017. Unsupervised monocular depth estimation with left-right consistency. In Proceedings of the IEEE conference on computer vision and pattern recognition, 270–279.
- Godard et al. (2019) Godard, C.; Mac Aodha, O.; Firman, M.; and Brostow, G. J. 2019. Digging into self-supervised monocular depth estimation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, 3828–3838.
- Gu et al. (2020) Gu, X.; Fan, Z.; Zhu, S.; Dai, Z.; Tan, F.; and Tan, P. 2020. Cascade cost volume for high-resolution multi-view stereo and stereo matching. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2495–2504.
- He et al. (2016) He, K.; Zhang, X.; Ren, S.; and Sun, J. 2016. Deep residual learning for image recognition. In Proceedings of the IEEE conference on computer vision and pattern recognition, 770–778.
- Hu, Shen, and Sun (2018) Hu, J.; Shen, L.; and Sun, G. 2018. Squeeze-and-excitation networks. In Proceedings of the IEEE conference on computer vision and pattern recognition, 7132–7141.
- Huang and Huang (2022) Huang, J.; and Huang, G. 2022. BEVDet4D: Exploit Temporal Cues in Multi-camera 3D Object Detection. arXiv preprint arXiv:2203.17054.
- Huang et al. (2021) Huang, J.; Huang, G.; Zhu, Z.; and Du, D. 2021. BEVDet: High-performance Multi-camera 3D Object Detection in Bird-Eye-View. arXiv preprint arXiv:2112.11790.
- Huo et al. (2020) Huo, Y.; Yi, H.; Wang, Z.; Shi, J.; Lu, Z.; Luo, P.; et al. 2020. Learning depth-guided convolutions for monocular 3d object detection. In 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 4306–4315. IEEE.
- Lang et al. (2019) Lang, A. H.; Vora, S.; Caesar, H.; Zhou, L.; Yang, J.; and Beijbom, O. 2019. Pointpillars: Fast encoders for object detection from point clouds. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 12697–12705.
- Li et al. (2022a) Li, Z.; Chen, Z.; Liu, X.; and Jiang, J. 2022a. DepthFormer: Exploiting Long-Range Correlation and Local Information for Accurate Monocular Depth Estimation. arXiv preprint arXiv:2203.14211.
- Li et al. (2022b) Li, Z.; Wang, W.; Li, H.; Xie, E.; Sima, C.; Lu, T.; Yu, Q.; and Dai, J. 2022b. BEVFormer: Learning Bird’s-Eye-View Representation from Multi-Camera Images via Spatiotemporal Transformers. arXiv preprint arXiv:2203.17270.
- Liu et al. (2022a) Liu, Y.; Wang, T.; Zhang, X.; and Sun, J. 2022a. PETR: Position Embedding Transformation for Multi-View 3D Object Detection. arXiv preprint arXiv:2203.05625.
- Liu et al. (2022b) Liu, Y.; Yan, J.; Jia, F.; Li, S.; Gao, Q.; Wang, T.; Zhang, X.; and Sun, J. 2022b. PETRv2: A Unified Framework for 3D Perception from Multi-Camera Images. arXiv preprint arXiv:2206.01256.
- Liu et al. (2022c) Liu, Z.; Mao, H.; Wu, C.-Y.; Feichtenhofer, C.; Darrell, T.; and Xie, S. 2022c. A convnet for the 2020s. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 11976–11986.
- Loshchilov and Hutter (2017) Loshchilov, I.; and Hutter, F. 2017. Decoupled weight decay regularization. arXiv preprint arXiv:1711.05101.
- Park et al. (2021a) Park, D.; Ambrus, R.; Guizilini, V.; Li, J.; and Gaidon, A. 2021a. Is Pseudo-Lidar needed for Monocular 3D Object detection? In Proceedings of the IEEE/CVF International Conference on Computer Vision, 3142–3152.
- Park et al. (2021b) Park, D.; Ambrus, R.; Guizilini, V.; Li, J.; and Gaidon, A. 2021b. Is Pseudo-Lidar needed for Monocular 3D Object detection? In Proceedings of the IEEE/CVF International Conference on Computer Vision, 3142–3152.
- Philion and Fidler (2020) Philion, J.; and Fidler, S. 2020. Lift, splat, shoot: Encoding images from arbitrary camera rigs by implicitly unprojecting to 3d. In European Conference on Computer Vision, 194–210. Springer.
- Qi et al. (2019) Qi, C. R.; Litany, O.; He, K.; and Guibas, L. J. 2019. Deep hough voting for 3d object detection in point clouds. In proceedings of the IEEE/CVF International Conference on Computer Vision, 9277–9286.
- Qian et al. (2020) Qian, R.; Garg, D.; Wang, Y.; You, Y.; Belongie, S.; Hariharan, B.; Campbell, M.; Weinberger, K. Q.; and Chao, W.-L. 2020. End-to-end pseudo-lidar for image-based 3d object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 5881–5890.
- Reading et al. (2021) Reading, C.; Harakeh, A.; Chae, J.; and Waslander, S. L. 2021. Categorical depth distribution network for monocular 3d object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 8555–8564.
- Roddick, Kendall, and Cipolla (2018) Roddick, T.; Kendall, A.; and Cipolla, R. 2018. Orthographic feature transform for monocular 3d object detection. arXiv preprint arXiv:1811.08188.
- Rukhovich, Vorontsova, and Konushin (2022) Rukhovich, D.; Vorontsova, A.; and Konushin, A. 2022. Imvoxelnet: Image to voxels projection for monocular and multi-view general-purpose 3d object detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, 2397–2406.
- Shi et al. (2020) Shi, S.; Guo, C.; Jiang, L.; Wang, Z.; Shi, J.; Wang, X.; and Li, H. 2020. Pv-rcnn: Point-voxel feature set abstraction for 3d object detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 10529–10538.
- Shi, Wang, and Li (2019) Shi, S.; Wang, X.; and Li, H. 2019. Pointrcnn: 3d object proposal generation and detection from point cloud. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 770–779.
- Sun et al. (2020) Sun, P.; Kretzschmar, H.; Dotiwalla, X.; Chouard, A.; Patnaik, V.; Tsui, P.; Guo, J.; Zhou, Y.; Chai, Y.; Caine, B.; et al. 2020. Scalability in perception for autonomous driving: Waymo open dataset. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2446–2454.
- Wang et al. (2021a) Wang, F.; Galliani, S.; Vogel, C.; Speciale, P.; and Pollefeys, M. 2021a. Patchmatchnet: Learned multi-view patchmatch stereo. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 14194–14203.
- Wang et al. (2022a) Wang, T.; Xinge, Z.; Pang, J.; and Lin, D. 2022a. Probabilistic and geometric depth: Detecting objects in perspective. In Conference on Robot Learning, 1475–1485. PMLR.
- Wang et al. (2021b) Wang, T.; Zhu, X.; Pang, J.; and Lin, D. 2021b. Fcos3d: Fully convolutional one-stage monocular 3d object detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, 913–922.
- Wang et al. (2019) Wang, Y.; Chao, W.-L.; Garg, D.; Hariharan, B.; Campbell, M.; and Weinberger, K. Q. 2019. Pseudo-lidar from visual depth estimation: Bridging the gap in 3d object detection for autonomous driving. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 8445–8453.
- Wang et al. (2022b) Wang, Y.; Guizilini, V. C.; Zhang, T.; Wang, Y.; Zhao, H.; and Solomon, J. 2022b. Detr3d: 3d object detection from multi-view images via 3d-to-2d queries. In Conference on Robot Learning, 180–191. PMLR.
- Xue et al. (2019) Xue, Y.; Chen, J.; Wan, W.; Huang, Y.; Yu, C.; Li, T.; and Bao, J. 2019. Mvscrf: Learning multi-view stereo with conditional random fields. In Proceedings of the IEEE/CVF International Conference on Computer Vision, 4312–4321.
- Yan, Mao, and Li (2018) Yan, Y.; Mao, Y.; and Li, B. 2018. Second: Sparsely embedded convolutional detection. Sensors, 18(10): 3337.
- Yang et al. (2022) Yang, J.; Song, L.; Liu, S.; Li, Z.; Li, X.; Sun, H.; Sun, J.; and Zheng, N. 2022. DBQ-SSD: Dynamic Ball Query for Efficient 3D Object Detection. arXiv preprint arXiv:2207.10909.
- Yao et al. (2018) Yao, Y.; Luo, Z.; Li, S.; Fang, T.; and Quan, L. 2018. Mvsnet: Depth inference for unstructured multi-view stereo. In Proceedings of the European Conference on Computer Vision (ECCV), 767–783.
- Yao et al. (2019) Yao, Y.; Luo, Z.; Li, S.; Shen, T.; Fang, T.; and Quan, L. 2019. Recurrent mvsnet for high-resolution multi-view stereo depth inference. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 5525–5534.
- Yin, Zhou, and Krahenbuhl (2021) Yin, T.; Zhou, X.; and Krahenbuhl, P. 2021. Center-based 3d object detection and tracking. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 11784–11793.
- You et al. (2019) You, Y.; Wang, Y.; Chao, W.-L.; Garg, D.; Pleiss, G.; Hariharan, B.; Campbell, M.; and Weinberger, K. Q. 2019. Pseudo-lidar++: Accurate depth for 3d object detection in autonomous driving. arXiv preprint arXiv:1906.06310.
- Zhou, Wang, and Krähenbühl (2019) Zhou, X.; Wang, D.; and Krähenbühl, P. 2019. Objects as points. arXiv preprint arXiv:1904.07850.
- Zhou and Tuzel (2018) Zhou, Y.; and Tuzel, O. 2018. Voxelnet: End-to-end learning for point cloud based 3d object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, 4490–4499.
- Zhu et al. (2019) Zhu, B.; Jiang, Z.; Zhou, X.; Li, Z.; and Yu, G. 2019. Class-balanced grouping and sampling for point cloud 3d object detection. arXiv preprint arXiv:1908.09492.