Asymmetric Student-Teacher Networks for Industrial Anomaly Detection
Abstract
Industrial defect detection is commonly addressed with anomaly detection (AD) methods where no or only incomplete data of potentially occurring defects is available. This work discovers previously unknown problems of student-teacher approaches for AD and proposes a solution, where two neural networks are trained to produce the same output for the defect-free training examples. The core assumption of student-teacher networks is that the distance between the outputs of both networks is larger for anomalies since they are absent in training. However, previous methods suffer from the similarity of student and teacher architecture, such that the distance is undesirably small for anomalies. For this reason, we propose asymmetric student-teacher networks (AST). We train a normalizing flow for density estimation as a teacher and a conventional feed-forward network as a student to trigger large distances for anomalies: The bijectivity of the normalizing flow enforces a divergence of teacher outputs for anomalies compared to normal data. Outside the training distribution the student cannot imitate this divergence due to its fundamentally different architecture. Our AST network compensates for wrongly estimated likelihoods by a normalizing flow, which was alternatively used for anomaly detection in previous work. We show that our method produces state-of-the-art results on the two currently most relevant defect detection datasets MVTec AD and MVTec 3D-AD regarding image-level anomaly detection on RGB and 3D data.
1 Introduction
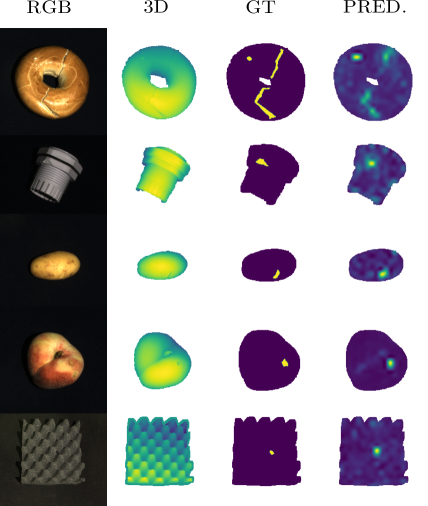
To ensure product quality and safety standards in industrial manufacturing processes, products are traditionally inspected by humans, which is expensive and unreliable in practice. For this reason, image-based methods for automatic inspection have been developed recently using advances in deep learning [9, 18, 29, 38, 39]. Since there are no or only very few negative examples, i.e. erroneous products, available, especially at the beginning of production, and new errors occur repeatedly during the process, traditional supervised algorithms cannot be applied to this task. Instead, it is assumed that only data of a normal class of defect-free examples is available in training which is termed as semi-supervised anomaly detection. This work and others [9, 22, 36, 38, 39] specialize for industrial anomaly detection. This domain differs in contrast to others that normal examples are similar to each other and to defective products. In this work, we not only show the effectiveness of our method for common RGB images but also on 3D data and their combination as shown in Figure 1.
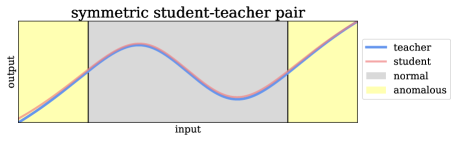
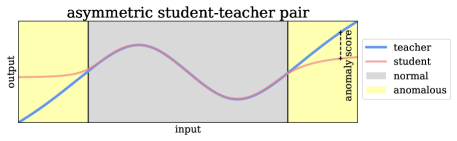
Several approaches try to solve the problem by so-called student-teacher networks [5, 7, 19, 51, 53]. First, the teacher is trained on a pretext task to learn a semantic embedding. In a second step, the student is trained to match the output of the teacher. The motivation is that the student can only match the outputs of the teacher on normal data since it is trained only on normal data. The distance between the outputs of student and teacher is used as an indicator of an anomaly at test-time. It is assumed that this distance is larger for defective examples compared to defect-free examples. However, this is not necessarily the case in previous work, since we discovered that both teacher and student are conventional (i. e. non-injective) neural networks with similar architecture. A student with similar architecture tends to undesired generalization, such that it extrapolates similar outputs as the teacher for inputs that are out of the training distribution, which, in turn, gives an undesired low anomaly score. This effect is shown in Figure 2 using an explanatory experiment with one-dimensional data: If the same neural network with one hidden layer is used for student and teacher, the outputs are still similar for anomalous data in the yellow area of the upper plot. In contrast, the outputs for anomalies diverge if an MLP with 3 hidden layers is used as the student.
In general, it is not guaranteed that an out-of-distribution input will cause a sufficiently large change in both outputs due to the missing injectivity of common neural networks. In contrast to normalizing flows, conventional networks have no guarantee to provide out-of-distribution outputs for out-of-distribution inputs. These problems motivate us to use an asymmetric student-teacher pair (AST): A bijective normalizing flow [34] acts as a teacher while a conventional sequential model acts as a student. In this way, the teacher guarantees to be sensitive to changes in the input caused by anomalies. Furthermore, the usage of different architectures and thus of different sets of learnable functions enforces the effect of distant outputs for out-of-distribution samples.
As a pretext task for the teacher, we optimize to transform the distribution of image features and/or depth maps to a normal distribution via maximum likelihood training which is equivalent to a density estimation [15]. This optimization itself is used in previous work [22, 38, 39] for anomaly detection by utilizing the likelihoods as an anomaly score: A low likelihood of being normal should be an indicator of anomalies. However, Le and Dinh [28] have shown that even perfect density estimators cannot guarantee anomaly detection. For example, just reparameterizing the data would change the likelihoods of samples. Furthermore, unstable training leads to misestimated likelihoods. We show that our student-teacher distance is a better measure for anomaly detection compared to the obtained likelihoods by the teacher. The advantage to using a normalizing flow itself for anomaly detection is that a possible misestimation in likelihood can be compensated for: If a low likelihood of being normal is incorrectly assigned to normal data, this output can be predicted by the student, thus still resulting in a small anomaly score. If a high likelihood of being normal is incorrectly assigned to anomalous data, this output cannot be predicted by the student, again resulting in a high anomaly score. In this way, we combine the benefits of student-teacher networks and density estimation with normalizing flows. We further enhance the detection by a positional encoding and by masking the foreground using 3D images.
Our contributions are summarized as follows:
-
•
Our method avoids the undesired generalization from teacher to student by having highly asymmetric networks as a student-teacher pair.
-
•
We improve student-teacher networks by incorporating a bijective normalizing flow as a teacher.
-
•
Our AST outperforms the density estimation capability of the teacher by utilizing student-teacher distances.
-
•
Code is available on GitHub111https://github.com/marco-rudolph/ast.
2 Related Work
2.1 Student-Teacher Networks
Originally, the motivation for having a student network that learns to regress the output of a teacher network was to distill knowledge and save model parameters [23, 31, 48]. In this case, a student with clearly fewer parameters compared to the teacher almost matches the performance. Some previous work exploits the student-teacher idea for anomaly detection by using the distance between their outputs: The larger the distance, the more likely the sample is anomalous. Bergmann et al. [7] propose an ensemble of students which are trained to regress the output of a teacher for image patches. This teacher is either a distilled version of an ImageNet-pre-trained network or trained via metric learning. The anomaly score is composed of the student uncertainty, measured by the variance of the ensemble, and the regression error. Wang et al. [51] extend the student task by regressing a feature pyramid rather than a single output of a pre-trained network. Bergmann and Sattlegger [5] adapt the student-teacher concept to point clouds. Local geometric descriptors are learned in a self-supervised manner to train the teacher. Xiao et al. [53] let teachers learn to classify applied image transformations. The anomaly score is a weighted sum of the regression error and the class score entropy of an ensemble of students. By contrast, our method requires only one student and the regression error as the only criterion to detect anomalies. All of the existing work is based on identical and conventional (non-injective) networks for student and teacher, which causes undesired generalization of the student as explained in Section 1.
2.2 Density Estimation
Anomaly detection can be viewed from a statistical perspective: By estimating the density of normal samples, anomalies are identified through a low likelihood. The concept of density estimation for anomaly detection can be simply realized by assuming a multivariate normal distribution. For example, the Mahalanobis distance of pre-extracted features can be applied as an anomaly score [12, 35] which is equivalent to computing the negative log likelihood of a multivariate Gaussian. However, this method is very inflexible to the training distributions, since the assumption of a Gaussian distribution is a strong simplification.
To this end, many works try to estimate the density more flexibly with a Normalizing Flow (NF) [14, 22, 38, 39, 41, 44]. Normalizing Flows are a family of generative models that map bijectively by construction [3, 15, 34, 52] as opposed to conventional neural networks. This property enables exact density estimation in contrast to other generative models like GANs [21] or VAEs [27]. Rudolph et al. [38] make use of this concept by modeling the density of multi-scale feature vectors obtained by pre-trained networks. Subsequently, they extend this to multi-scale feature maps instead of vectors to avoid information loss caused by averaging [39]. To handle differently sized feature maps so-called cross-convolutions are integrated. A similar approach by Gudovskiy et al. [22] computes a density on feature maps with a conditional normalizing flow, where likelihoods are estimated on the level of local positions which act as a condition for the NF.
A common problem of normalizing flows is unstable training, which has a tradeoff on the flexibility of density estimation [4]. However, even the ground truth density estimation does not provide perfect anomaly detection, since the density strongly depends on the parameterization [28].
2.3 Other Approaches
Generative Models
Many approaches try to tackle anomaly detection based on other generative models than normalizing flows as autoencoders [9, 18, 20, 37, 55, 57] or GANs [1, 11, 42].
This is motivated by the inability of these models to generate anomalous data.
Usually, the reconstruction error is used for anomaly scoring.
Since the magnitude of this error depends highly on the size and structure of the anomaly, these methods underperform in the industrial inspection setting.
The disadvantage of these methods is that the synthetic anomalies cannot imitate many real anomalies.
Anomaly Synthesization
Some work reformulates semi-supervised anomaly detection as a supervised problem by synthetically generating anomalies.
Either parts of training images [29, 43, 46] or random images [54] are patched into normal images.
Synthetic masks are created to train a supervised segmentation.
Traditional Approaches
In addition to deep-learning-based approaches, there are also classical approaches for anomaly detection.
The one-class SVM [45] is a max-margin method optimizing a function that assigns a higher value to high-density regions than to low-density regions.
Isolation forests [30] are based on decision trees, where a sample is considered anomalous if it can be separated from the rest of the data by a few constraints.
Local Outlier Factor [10] compares the density of a point with that of its neighbors.
A comparatively low density of a point identifies anomalies.
Traditional approaches usually fail in visual anomaly detection due to the high dimensionality and complexity of the data.
This can be circumvented by combining them with other techniques:
For example, the distance to the nearest neighbor, as first proposed by Amer and Goldstein [2], is used as an anomaly score after features are extracted by a pre-trained network [32, 36].
Alternatively point cloud features [24] or density-based clustering [16, 17] can be used to characterize a points neighborhood and label it accordingly.
However, the runtime is linearly related to the dataset size.
3 Method
Our goal is to train two models, a student model and a teacher model , such that the student learns to regress the teacher outputs on defect-free image data only. The training process is divided into two phases: First, the teacher model is optimized to transform the training distribution to a normal distribution bijectively with a normalizing flow. Second, the student is optimized to match the teacher outputs by minimizing the distance between and of training samples . We apply the distance for anomaly scoring at test-time, which is further described in Section 3.2.
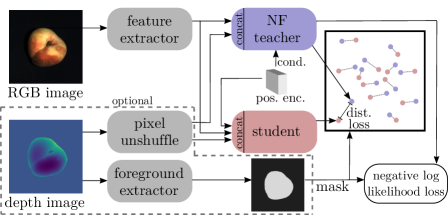
We follow [7, 22, 39] and use extracted features obtained by a pre-trained network on ImageNet [13] instead of RGB images as direct input for our models. Such networks have been shown to be universal feature extractors whose outputs carry relevant semantics for industrial anomaly detection.
In addition to RGB data, our approach is easily extendable to multimodal inputs including 3D data. If 3D data is available, we concatenate depth maps to these features along the channels. Since the feature maps are reduced in height and width compared to the depth map resolution by a factor , we apply pixel-unshuffling [56] by grouping a depth image patch of pixels as one pixel with channels to match the dimensions of the feature maps.
Any 3D data that may be present is used to extract the foreground. This is straightforward and reasonable whenever the background is static or planar, which is the case for almost all real applications. Pixels that are in the background are ignored when optimizing the teacher and student by masking the distance and negative log likelihood loss, which are introduced in Sections 3.1 and 3.2. If not 3D data is available, the whole image is considered as foreground. Details of the foreground extraction are given in Section 4.2.1.
Similar to [22], we use a sinusoidal positional encoding [50] for the spatial dimensions of the input maps as a condition for the normalizing flow . In this way, the occurrence of a feature is related to its position to detect anomalies such as misplaced objects. An overview of our pipeline is given in Figure 3.
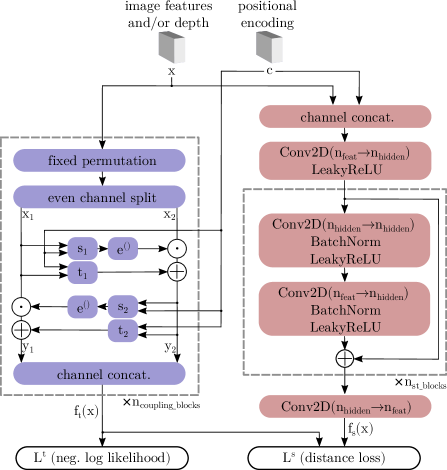
3.1 Teacher
Similar to [22, 38, 39], we train a normalizing flow based on Real-NVP [15] to transform the training distribution to a normal distribution . In contrast to previous work, we do not use the outputs to compute likelihoods and thereby obtain anomaly scores directly. Instead, we interpret this training as a pretext task to create targets for our student network.
The normalizing flow consists of multiple subsequent affine coupling blocks. Let the input be feature maps with features of size . Within these blocks, the channels of the input are split evenly along the channels into the parts and after randomly choosing a permutation that remains fixed. These parts are each concatenated with a positional encoding as a static condition. Both are used to compute scaling and shift parameters for an affine transformation of the counterpart by having subnetworks and for each part:
| (1) | |||
where is the element-wise product and denotes concatenation. The output of one coupling block is the concatenation of and along the channels. Note that the number of dimensions of input and output does not change due to invertibility.
To stabilize training, we apply alpha-clamping of scalar coefficients as in [4] and the gamma-trick as in [39]. Using the change-of-variable formula with as our final output
| (2) |
we minimize the negative log likelihood with as the normal distribution by optimizing the mean of
| (3) |
over all (foreground) pixels at pixel position .
| Dataset | MVTec AD | MVTec 3D-AD |
| Alias | (MVT2D) | (MVT3D) |
| RGB images | ✓ | ✓ |
| 3D scans | ✓ | |
| #categories | 15 | 10 |
| image side length | 700-1024 | 400-800 |
| #train samples per cat. | 60-320 | 210-300 |
| #test samples per cat. | 42-160 | 100-159 |
| #defect types per cat. | 1-7 | 3-5 |
| Category | ARNet | DRÆM | GAN | Rippel | PatchCore | DifferNet | PaDiM | CFlow | CS-Flow | Uninf. | STFPM* | AST | |
| [18] | [54] | [1] | [35] | [36] | [38] | [12] | [22] | [39] | Stud. [7] | [51] | (ours) | ||
| Grid | 88.3 | 99.9 | 70.8 | 93.7 | 98.2 | 84.0 | - | 99.6 | 99.0 | 98.1 | 100 | 99.1 0.2 | |
| Leather | 86.2 | 100 | 84.2 | 100 | 100 | 97.1 | - | 100 | 99.9 | 94.7 | 100 | 100 0.0 | |
| Tile | 73.5 | 99.6 | 79.4 | 100 | 98.7 | 99.4 | - | 99.9 | 100 | 94.7 | 95.5 | 100 0.0 | |
| Carpet | 70.6 | 97.8 | 69.9 | 99.6 | 98.7 | 92.9 | - | 98.7 | 100 | 99.9 | 98.9 | 97.5 0.4 | |
|
Textures |
Wood | 92.3 | 99.1 | 83.4 | 99.2 | 98.8 | 99.8 | - | 99.1 | 100 | 99.1 | 99.2 | 100 0.0 |
| Avg. Text. | 82.2 | 99.3 | 77.5 | 98.5 | 98.3 | 94.6 | 99.0 | 99.5 | 99.8 | 97.3 | 98.7 | 99.3 0.08 | |
| Bottle | 94.1 | 99.2 | 89.2 | 99.0 | 100 | 99.0 | - | 100 | 99.8 | 99.0 | 100 | 100 0.0 | |
| Capsule | 68.1 | 98.5 | 73.2 | 96.3 | 98.1 | 86.9 | - | 97.7 | 97.1 | 92.5 | 88.0 | 99.7 0.1 | |
| Pill | 78.6 | 98.9 | 74.3 | 91.4 | 96.6 | 88.8 | - | 96.8 | 98.6 | 92.2 | 93.8 | 99.1 0.1 | |
| Transistor | 84.3 | 93.1 | 79.2 | 98.2 | 100 | 91.1 | - | 95.2 | 99.3 | 79.4 | 93.7 | 99.3 0.1 | |
| Zipper | 87.6 | 100 | 74.5 | 98.8 | 99.4 | 95.1 | - | 98.5 | 99.7 | 94.4 | 93.6 | 99.1 0.1 | |
| Cable | 83.2 | 91.8 | 75.7 | 99.1 | 99.5 | 95.9 | - | 97.6 | 99.1 | 78.7 | 92.3 | 98.5 0.2 | |
|
Objects |
Hazelnut | 85.5 | 100 | 78.5 | 100 | 100 | 99.3 | - | 100 | 99.6 | 99.1 | 100 | 100 0.0 |
| Metal Nut | 66.7 | 98.7 | 70.0 | 97.4 | 100 | 96.1 | - | 99.3 | 99.1 | 89.1 | 100 | 98.5 0.2 | |
| Screw | 100 | 93.9 | 74.6 | 94.5 | 98.1 | 96.3 | - | 91.9 | 97.6 | 86.0 | 88.2 | 99.7 0.1 | |
| Toothbrush | 100 | 100 | 65.3 | 94.1 | 100 | 98.6 | - | 99.7 | 91.9 | 100 | 87.8 | 96.6 0.1 | |
| Avg. Obj. | 84.8 | 97.4 | 75.5 | 96.9 | 99.2 | 94.7 | 97.2 | 97.7 | 98.2 | 91.0 | 93.7 | 99.1 0.03 | |
| Average | 83.9 | 98.0 | 76.2 | 97.5 | 99.1 | 94.7 | 97.9 | 98.3 | 98.7 | 93.2 | 95.4 | 99.2 0.04 |
3.2 Student
As opposed to the teacher, the student is a conventional feed-forward network that does not map injectively or surjectively. We propose a simple fully convolutional network with residual blocks which is shown in Figure 4. Each residual block consists of two sequences of convolutional layers, batch normalization [25] and leaky ReLU activations. We add convolutions as the first and last layer to increase and decrease the feature dimensions.
Similarly to the teacher, the student takes image features as input which are concatenated with 3D data if available. In addition, the positional encoding is concatenated. The output dimensions match the teacher to enable pixel-wise distance computation. We minimize the squared -distance between student outputs and the teacher outputs on training samples , given the training set , at a pixel position of the output:
| (4) |
Averaging over all (foreground) pixels gives us the final loss. The distance is also used in testing to obtain an anomaly score on image level: Ignoring the anomaly scores of background pixels, we aggregate the pixel distances of one sample by computing either the maximum or the mean over the pixels.
4 Experiments
4.1 Datasets
To demonstrate the benefits of our method on a wide range of industrial inspection scenarios, we evaluate with a diverse set of 25 scenarios in total, including natural objects, industrial components and textures in 2D and 3D. Table 1 shows an overview of the used benchmark datasets MVTec AD [6] and MVTec 3D-AD [8]. For both datasets, the training set only contains defect-free data and the test set contains defect-free and defective examples. In addition to image-level labels, the datasets also provide pixel-level annotations about defective regions which we use to evaluate the segmentation of defects.
MVTec AD, which will be called MVT2D in the following, is a high-resolution 2D RGB image dataset containing 10 object and 5 texture categories. The total of 73 defect types in the test set appear, for example, in the form of displacements, cracks or scratches in various sizes and shapes. The images have a side length of 700 to 1024 pixels.
MVTec 3D-AD, to which we refer to as MVT3D, is a very recent 3D dataset containing 2D RGB images paired with 3D scans for 10 categories. These categories include deformable and non-deformable objects, partially with natural variations (e.g. peach and carrot). In addition to the defect types in MVT2D there are also defects that are only recognizable from the depth map, such as indentations. On the other hand, there are anomalies such as discoloration that can only be perceived from the RGB data. The RGB images have a resolution of 400 to 800 pixels per side, paired with rasterized 3D point clouds at the same resolution.
4.2 Implementation Details
4.2.1 Image Preprocessing
Following [12, 39], we use the layer 36 output of EfficientNet-B5 [47] pre-trained on ImageNet [13] as a feature extractor. This feature extractor is not trained during training of the student and teacher networks. The images are resized to a resolution of pixels resulting in feature maps of size with 304 channels.
4.2.2 3D Preprocessing
We discard the and coordinates due to the low informative content and use only the depth component in centimeters. Missing depth values are repeatedly filled by using the average value of valid pixels from an 8-connected neighborhood for 3 iterations. We model the background as a 2D plane by interpolating the depth of the 4 corner pixels. A pixel is assumed as foreground if its depth is further than distant from the background plane. As an input to our models, we first resize the masks to pixels via bilinear downsampling and then perform pixel-unshuffling [56] with as described in Section 3 to match the feature map resolution. In order to detect anomalies at the edge of the object and fill holes of missing values, the foreground mask is dilated using a square structural element of size 8. We subtract the mean foreground depth from each depth map and set its background pixels to 0. The binary foreground mask with ones as foreground and zeros as background is downsampled to feature map resolution to mask the loss for student and teacher. This is done by a bilinear interpolation followed by a binarization where all entries greater than zero are assumed as foreground to mask the loss at position :
| (5) |
4.2.3 Teacher
For the normalizing flow architecture of the teacher, we use 4 coupling blocks which are conditioned on a positional encoding with 32 channels. Each pair of internal subnetworks and is designed as one shallow convolutional network with one hidden layer whose output is split into the scale and shift components. Inside we use ReLU-Activations and a hidden channel size of 1024 for MVT2D and 64 for MVT3D. We choose the alpha-clamping parameter for MVT2D and for MVT3D. The teacher networks are trained for 240 epochs for MVT2D and 72 epochs for MVT3D, respectively, with the Adam optimizer [26], using author-given momentum parameters and , a learning rate of and a weight decay of .
4.2.4 Student
For the student networks, we use residual convolutional blocks as described in Section 3.2. The Leaky-ReLU-activations use a slope of 0.2 for negative values. We choose a hidden channel size of for the residual block. Likewise, we take over the number of epochs and optimizer parameters from the teacher. The scores at feature map resolution are aggregated for evaluation at image level by the maximum distance if a foreground mask is available, and the average distance otherwise (RGB only).
4.3 Evaluation Metrics
As common for anomaly detection, we evaluate the performance of our method on image-level by calculating the area under receiver operating characteristics (AUROC). The ROC measures the true positive rate dependent on the false positive rate for varying thresholds of the anomaly score. Thus, it is independent of the choice of a threshold and invariant to the class balance in the test set. For measuring the segmentation of anomalies at pixel-level, we compute the AUROC on pixel level given the ground truth masks in the datasets.
| Method | Bagel |
|
Carrot | Cookie | Dowel | Foam | Peach | Potato | Rope | Tire | Mean | |||
| 3D | Voxel GAN [8] | 38.3 | 62.3 | 47.4 | 63.9 | 56.4 | 40.9 | 61.7 | 42.7 | 66.3 | 57.7 | 53.7 | ||
| Voxel AE [8] | 69.3 | 42.5 | 51.5 | 79.0 | 49.4 | 55.8 | 53.7 | 48.4 | 63.9 | 58.3 | 57.1 | |||
| Voxel VM [8] | 75.0 | 74.7 | 61.3 | 73.8 | 82.3 | 69.3 | 67.9 | 65.2 | 60.9 | 69.0 | 69.9 | |||
| Depth GAN [8] | 53.0 | 37.6 | 60.7 | 60.3 | 49.7 | 48.4 | 59.5 | 48.9 | 53.6 | 52.1 | 52.3 | |||
| Depth AE [8] | 46.8 | 73.1 | 49.7 | 67.3 | 53.4 | 41.7 | 48.5 | 54.9 | 56.4 | 54.6 | 54.6 | |||
| Depth VM [8] | 51.0 | 54.2 | 46.9 | 57.6 | 60.9 | 69.9 | 45.0 | 41.9 | 66.8 | 52.0 | 54.6 | |||
| 1-NN (FPFH) [24] | 82.5 | 55.1 | 95.2 | 79.7 | 88.3 | 58.2 | 75.8 | 88.9 | 92.9 | 65.3 | 78.2 | |||
| 3D-ST128 [5]☎ | 86.2 | 48.4 | 83.2 | 89.4 | 84.8 | 66.3 | 76.3 | 68.7 | 95.8 | 48.6 | 74.8 | |||
| AST (ours) | 88.1 2.0 | 57.6 6.9 | 96.5 1.0 | 95.7 0.6 | 67.9 1.1 | 79.7 1.2 | 99.0 0.9 | 91.5 2.1 | 95.6 0.7 | 61.1 3.4 | 83.3 0.8 | |||
| RGB | PatchCore [36] | 87.6 | 88.0 | 79.1 | 68.2 | 91.2 | 70.1 | 69.5 | 61.8 | 84.1 | 70.2 | 77.0 | ||
| DifferNet [38]☎ | 85.9 | 70.3 | 64.3 | 43.5 | 79.7 | 79.0 | 78.7 | 64.3 | 71.5 | 59.0 | 69.6 | |||
| PADiM [12]* | 97.5 | 77.5 | 69.8 | 58.2 | 95.9 | 66.3 | 85.8 | 53.5 | 83.2 | 76.0 | 76.4 | |||
| CS-Flow [39]☎ | 94.1 | 93.0 | 82.7 | 79.5 | 99.0 | 88.6 | 73.1 | 47.1 | 98.6 | 74.5 | 83.0 | |||
| STFPM [51]* | 93.0 | 84.7 | 89.0 | 57.5 | 94.7 | 76.6 | 71.0 | 59.8 | 96.5 | 70.1 | 79.3 | |||
| AST (ours) | 94.7 0.7 | 92.8 1.2 | 85.1 1.2 | 82.5 0.8 | 98.1 0.4 | 95.1 0.6 | 89.5 1.1 | 61.3 2.4 | 99.2 0.2 | 82.1 0.9 | 88.0 0.6 | |||
| 3D + RGB | Voxel GAN [8] | 68.0 | 32.4 | 56.5 | 39.9 | 49.7 | 48.2 | 56.6 | 57.9 | 60.1 | 48.2 | 51.7 | ||
| Voxel AE [8] | 51.0 | 54.0 | 38.4 | 69.3 | 44.6 | 63.2 | 55.0 | 49.4 | 72.1 | 41.3 | 53.8 | |||
| Voxel VM [8] | 55.3 | 77.2 | 48.4 | 70.1 | 75.1 | 57.8 | 48.0 | 46.6 | 68.9 | 61.1 | 60.9 | |||
| Depth GAN [8] | 53.8 | 37.2 | 58.0 | 60.3 | 43.0 | 53.4 | 64.2 | 60.1 | 44.3 | 57.7 | 53.2 | |||
| Depth AE [8] | 64.8 | 50.2 | 65.0 | 48.8 | 80.5 | 52.2 | 71.2 | 52.9 | 54.0 | 55.2 | 59.5 | |||
| Depth VM [8] | 51.3 | 55.1 | 47.7 | 58.1 | 61.7 | 71.6 | 45.0 | 42.1 | 59.8 | 62.3 | 55.5 | |||
| PatchCore+FPFH [24] | 91.8 | 74.8 | 96.7 | 88.3 | 93.2 | 58.2 | 89.6 | 91.2 | 92.1 | 88.6 | 86.5 | |||
| AST (ours) | 98.3 0.4 | 87.3 3.3 | 97.6 0.5 | 97.1 0.3 | 93.22.1 | 88.5 1.4 | 97.4 1.4 | 98.1 1.2 | 100 0.0 | 79.7 1.0 | 93.7 0.2 |
| Method | MVT2D | MVT3D (RGB+3D) |
| AE-SSIM [9] | 87.0 | - |
| PatchCore [36] | 98.4 | - |
| PatchCore+FPFH [24] | - | 99.2 |
| AST (ours) | 95.0 0.03 | 97.6 0.02 |
4.4 Results
4.4.1 Detection
Table 2 shows the AUROC of our method and previous work for detecting anomalies on the 15 classes of MVT2D as well as the averages for textures, objects and all classes. We set a new state-of-the-art performance on the mean detection AUROC over all classes, improving it slightly to 99.2%. This is mainly due to the good performance on the more challenging objects, where we outperform previous work by a comparatively large margin of 0.9%, except for PatchCore [36]. The detection of anomalies on textures, which CS-Flow [39] has already almost solved with a mean AUROC of 99.8%, still works very reliably at 99.3%. Especially compared to the two student-teacher approaches [7, 51], a significant improvement of 6% and 3.6% respectively is archieved. Moreover, our student-teacher distances show to be a better indicator of anomalies compared to the likelihoods of current state-of-the-art density estimators [22, 39] which, like our teacher, are based on normalizing flows.
Even though MVT2D has established itself as a standard benchmark in the past, this dataset (especially the textures) is easily solvable for recent methods, and differences are mainly in the sub-percent range, which is only a minor difference in terms of the comparatively small size of the dataset. In the following, we focus on the newer, more challenging MVT3D dataset where the normal data shows more variance and anomalies only partly occur in one of the two data modalities, RGB and 3D.
The results for individual classes of MVT3D grouped by data modality are given in Table 3. We are able to outperform all previous methods for all data modalities regarding the average of all classes by a large margin of 5.1% for 3D, 5% for RGB and 7.2% for the combination. Facing the individual classes and data domains, we set a new state-of-the-art in 21 of 30 cases. Note that this data set is much more challenging when comparing the best results from previous work (99.1% for MVT2D vs. 86.5% AUROC for MVT3D). Nevertheless, we detect defects in 7 out of 10 cases for RGB+3D at an AUROC of at least 93%, which demonstrates the robustness of our method. In contrast, the nearest-neighbor approach PatchCore [36], which provides comparable performance to us on MVT2D, struggles with the increased demands of the dataset and is outperformed by 11% on RGB. The same applies for the 3D extension [24] using FPFH [40] despite using a foreground mask as well. Figure 1 shows qualitative results for the RGB+3D case given both inputs and ground truth annotations. More examples can be found in the supplemental material. Despite the low resolution, the regions of the anomaly can still be localized well for practical purposes. Table 4 reports the pixel-AUROC of our method and previous work.
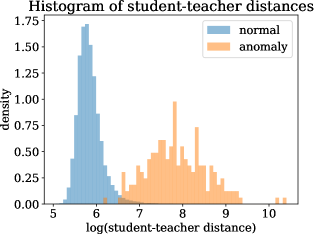
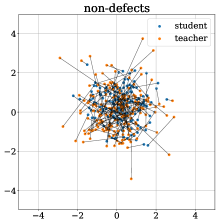
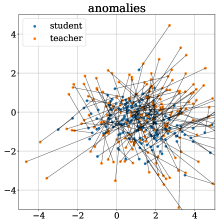
For the class peach in the RGB+3D setting, the top of Figure 5 compares the distribution of student-teacher distances for anomalous and normal regions. The distribution of anomalous samples shows a clear shift towards larger distances. At the bottom of Figure 5, the outputs of student and teacher as well as our the distance of corresponding pairs representing our anomaly score are visualized by a random orthographic 2D projection. Note that visualizations made by techniques such as t-SNE [49] or PCA [33] are not meaningful here, since the teacher outputs (and therefore most of the student outputs) follow an isotropic standard normal distribution. Therefore, different random projections barely differ qualitatively.
4.4.2 Ablation Studies
We demonstrate the effectiveness of our contributions and design decisions with several ablation studies. Table 5 compares the performance of variants of students with the teacher, which can be used as a density estimator itself for anomaly detection by using its likelihoods, given by Eq. 2, as anomaly score. In comparison, a symmetric student-teacher pair worsens the results by 1 to 2%, excepting the RGB case. However, the performance is already improved for RGB and 3D+RGB by creating the asymmetry with a deeper version of the student than the teacher by doubling the number of coupling blocks to 8. This effect is further enhanced if the architecture of the NF-teacher is replaced by a conventional feedforward network as we suggest. We also vary the depth of our student network and analyzed its relation to performance, model size and inference time in Table 6. With an increasing number of residual blocks , we observe an increasing performance which is almost saturated after 4 blocks. Since the remaining potential in detection performance is not in relation to the linearly increasing additional computational effort per block, we suggest to choose 4 blocks to have a good trade-off.
In Table 7 we investigate the impact of the positional encoding and the foreground mask. For MVT3D, positional encoding improves the detection by 1.4% of our AST-pair when trained with 3D data as the only input. Even though the effect is not present when combining both data modalities, we consider it generally reasonable to use the positional encoding, considering that the integration with just 32 additional channels does not significantly increase the computational effort.
Foreground extraction in order to mask the loss for training and anomaly score for testing is also highly effective. Since the majority of the image area often consists of background, the teacher has to spend a large part of the distribution on the background. Masking allows the teacher and student to focus on the essential structures. Moreover, noisy background scores are eliminated.
| Method | 3D | RGB | 3D+RGB |
| Teacher only | 82.2 | 69.8 | 90.9 |
| NF student (symm.) | 81.8 | 76.0 | 88.9 |
| NF student (deeper) | 81.8 | 76.7 | 92.7 |
| AST (ours) | 83.3 | 88.0 | 93.7 |
| AUROC | #Params. [M] | inf. time [ms] | |
| 1 | 92.8 | 26.0 | 3.4 |
| 2 | 93.3 | 44.8 | 6.1 |
| 4 | 93.7 | 82.6 | 10.4 |
| 8 | 93.7 | 151.1 | 19.8 |
| 12 | 93.8 | 233.6 | 29.4 |
| teacher | 90.9 | 3.8 | 4.5 |
| input | pos. enc. | mask | teacher | AST |
| ✗ | ✓ | 78.4 | 81.9 | |
| 3D | ✓ | ✗ | 59.4 | 67.2 |
| ✓ | ✓ | 82.2 | 83.3 | |
| ✗ | ✗ | 69.3 | 87.8 | |
| RGB | ✓ | ✗ | 69.8 | 88.0 |
| ✓ | ✓ | n. a. | n. a. | |
| ✗ | ✓ | 90.9 | 93.8 | |
| 3D+RGB | ✓ | ✗ | 66.2 | 84.0 |
| ✓ | ✓ | 90.9 | 93.7 |
5 Conclusion
We discovered the generalization problem of previous student teacher pairs for AD and introduced an alternative student-teacher method that prevents this issue by using a highly different architecture for student and teacher. We were able to compensate for skewed likelihoods of a normalizing flow-based teacher, which was used directly for detection in previous work, by the additional use of a student. Future work could extend the approach to more data domains and improve the localization resolution.
Acknowledgements.
This work was supported by the Federal Ministry of Education and Research (BMBF), Germany under the project LeibnizKILabor (grant no. 01DD20003), the Center for Digital Innovations (ZDIN) and the Deutsche Forschungsgemeinschaft (DFG) under Germany’s Excellence Strategy within the Cluster of Excellence PhoenixD (EXC 2122).
References
- [1] Samet Akcay, Amir Atapour-Abarghouei, and Toby P. Breckon. Ganomaly: Semi-supervised anomaly detection via adversarial training. In Computer Vision – ACCV 2018, pages 622–637, Cham, 2019. Springer International Publishing.
- [2] Mennatallah Amer and Markus Goldstein. Nearest-neighbor and clustering based anomaly detection algorithms for rapidminer. In Proc. of the 3rd RapidMiner Community Meeting and Conference (RCOMM 2012), pages 1–12, 2012.
- [3] Lynton Ardizzone, Jakob Kruse, Sebastian Wirkert, Daniel Rahner, Eric W Pellegrini, Ralf S Klessen, Lena Maier-Hein, Carsten Rother, and Ullrich Köthe. Analyzing inverse problems with invertible neural networks. In ICLR, 2019.
- [4] Lynton Ardizzone, Carsten Lüth, Jakob Kruse, Carsten Rother, and Ullrich Köthe. Guided image generation with conditional invertible neural networks. arXiv preprint arXiv:1907.02392, 2019.
- [5] Paul Bergmann, Kilian Batzner, Michael Fauser, David Sattlegger, and Carsten Steger. Beyond dents and scratches: Logical constraints in unsupervised anomaly detection and localization. Int. J. Comput. Vis., 130(4):947–969, 2022.
- [6] Paul Bergmann, Michael Fauser, David Sattlegger, and Carsten Steger. Mvtec ad–a comprehensive real-world dataset for unsupervised anomaly detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 9592–9600, 2019.
- [7] Paul Bergmann, Michael Fauser, David Sattlegger, and Carsten Steger. Uninformed students: Student-teacher anomaly detection with discriminative latent embeddings. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4183–4192, 2020.
- [8] Paul Bergmann, Xin Jin, David Sattlegger, and Carsten Steger. The mvtec 3d-ad dataset for unsupervised 3d anomaly detection and localization. 17th International Conference on Computer Vision Theory and Applications, 2022.
- [9] Paul Bergmann, Sindy Löwe, Michael Fauser, David Sattlegger, and C. Steger. Improving unsupervised defect segmentation by applying structural similarity to autoencoders. In VISIGRAPP, 2019.
- [10] Markus M Breunig, Hans-Peter Kriegel, Raymond T Ng, and Jörg Sander. Lof: identifying density-based local outliers. In Proceedings of the 2000 ACM SIGMOD international conference on Management of data, pages 93–104, 2000.
- [11] Haoqing Cheng, Heng Liu, Fei Gao, and Zhuo Chen. Adgan: A scalable gan-based architecture for image anomaly detection. In 2020 IEEE 4th Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), volume 1, pages 987–993. IEEE, 2020.
- [12] Thomas Defard, Aleksandr Setkov, Angelique Loesch, and Romaric Audigier. Padim: a patch distribution modeling framework for anomaly detection and localization. In pattern Recognition, ICPR International Workshops and Challenges, 2021.
- [13] Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, and Li Fei-Fei. Imagenet: A large-scale hierarchical image database. In 2009 IEEE conference on computer vision and pattern recognition, pages 248–255. Ieee, 2009.
- [14] Madson LD Dias, César Lincoln C Mattos, Ticiana LC da Silva, José Antônio F de Macedo, and Wellington CP Silva. Anomaly detection in trajectory data with normalizing flows. arXiv preprint arXiv:2004.05958, 2020.
- [15] Laurent Dinh, Jascha Sohl-Dickstein, and Samy Bengio. Density estimation using real nvp. ICLR 2017, 2016.
- [16] Alexander Dockhorn, Christian Braune, and Rudolf Kruse. An alternating optimization approach based on hierarchical adaptations of dbscan. In 2015 IEEE Symposium Series on Computational Intelligence (SSCI), number 2, pages 749–755, 2015.
- [17] Alexander Dockhorn, Christian Braune, and Rudolf Kruse. Variable density based clustering. In 2016 IEEE Symposium Series on Computational Intelligence (SSCI), pages 1–8, Dec. 2016.
- [18] Ye Fei, Chaoqin Huang, Cao Jinkun, Maosen Li, Ya Zhang, and Cewu Lu. Attribute restoration framework for anomaly detection. IEEE Transactions on Multimedia, 2020.
- [19] Mariana-Iuliana Georgescu, Antonio Barbalau, Radu Tudor Ionescu, Fahad Shahbaz Khan, Marius Popescu, and Mubarak Shah. Anomaly detection in video via self-supervised and multi-task learning. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 12742–12752, 2021.
- [20] Dong Gong, Lingqiao Liu, Vuong Le, Budhaditya Saha, Moussa Reda Mansour, Svetha Venkatesh, and Anton van den Hengel. Memorizing normality to detect anomaly: Memory-augmented deep autoencoder for unsupervised anomaly detection. In Proceedings of the IEEE International Conference on Computer Vision, pages 1705–1714, 2019.
- [21] Ian Goodfellow, Jean Pouget-Abadie, Mehdi Mirza, Bing Xu, David Warde-Farley, Sherjil Ozair, Aaron Courville, and Yoshua Bengio. Generative adversarial nets. In Advances in neural information processing systems, pages 2672–2680, 2014.
- [22] Denis Gudovskiy, Shun Ishizaka, and Kazuki Kozuka. Cflow-ad: Real-time unsupervised anomaly detection with localization via conditional normalizing flows. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, pages 98–107, 2022.
- [23] Geoffrey Hinton, Oriol Vinyals, Jeff Dean, et al. Distilling the knowledge in a neural network. arXiv preprint arXiv:1503.02531, 2(7), 2015.
- [24] Eliahu Horwitz and Yedid Hoshen. An empirical investigation of 3d anomaly detection and segmentation. arXiv preprint arXiv:2203.05550, 2022.
- [25] Sergey Ioffe and Christian Szegedy. Batch normalization: Accelerating deep network training by reducing internal covariate shift. In International conference on machine learning, pages 448–456. PMLR, 2015.
- [26] Diederik P Kingma and Jimmy Ba. Adam: A method for stochastic optimization. In International Conference on Learning Representations (ICLR), 2015.
- [27] Diederik P. Kingma and Max Welling. Auto-encoding variational bayes. CoRR, abs/1312.6114, 2013.
- [28] Charline Le Lan and Laurent Dinh. Perfect density models cannot guarantee anomaly detection. Entropy, 23(12):1690, 2021.
- [29] Chun-Liang Li, Kihyuk Sohn, Jinsung Yoon, and Tomas Pfister. Cutpaste: Self-supervised learning for anomaly detection and localization. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 9664–9674, 2021.
- [30] Fei Tony Liu, Kai Ming Ting, and Zhi-Hua Zhou. Isolation forest. In 2008 eighth ieee international conference on data mining, pages 413–422. IEEE, 2008.
- [31] Seyed Iman Mirzadeh, Mehrdad Farajtabar, Ang Li, Nir Levine, Akihiro Matsukawa, and Hassan Ghasemzadeh. Improved knowledge distillation via teacher assistant. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 34, pages 5191–5198, 2020.
- [32] Tiago Nazare, Rodrigo de Mello, and Moacir Ponti. Are pre-trained cnns good feature extractors for anomaly detection in surveillance videos? arXiv preprint arXiv:1811.08495, 2018.
- [33] Karl Pearson. Liii. on lines and planes of closest fit to systems of points in space. The London, Edinburgh, and Dublin philosophical magazine and journal of science, 2(11):559–572, 1901.
- [34] Danilo Rezende and Shakir Mohamed. Variational inference with normalizing flows. In International Conference on Machine Learning, pages 1530–1538. PMLR, 2015.
- [35] Oliver Rippel, Patrick Mertens, and Dorit Merhof. Modeling the distribution of normal data in pre-trained deep features for anomaly detection. arXiv preprint arXiv:2005.14140, 2020.
- [36] Karsten Roth, Latha Pemula, Joaquin Zepeda, Bernhard Schölkopf, Thomas Brox, and Peter Gehler. Towards total recall in industrial anomaly detection. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 14318–14328, 2022.
- [37] Marco Rudolph, Bastian Wandt, and Bodo Rosenhahn. Structuring autoencoders. In Proceedings of the IEEE International Conference on Computer Vision Workshops, 2019.
- [38] Marco Rudolph, Bastian Wandt, and Bodo Rosenhahn. Same same but differnet: Semi-supervised defect detection with normalizing flows. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, pages 1907–1916, 2021.
- [39] Marco Rudolph, Tom Wehrbein, Bodo Rosenhahn, and Bastian Wandt. Fully convolutional cross-scale-flows for image-based defect detection. In Proceedings of the IEEE/CVF Winter Conference on Applications of Computer Vision, pages 1088–1097, 2022.
- [40] Radu Bogdan Rusu, Nico Blodow, and Michael Beetz. Fast point feature histograms (fpfh) for 3d registration. In 2009 IEEE international conference on robotics and automation, pages 3212–3217. IEEE, 2009.
- [41] Artem Ryzhikov, Maxim Borisyak, Andrey Ustyuzhanin, and Denis Derkach. Normalizing flows for deep anomaly detection. arXiv preprint arXiv:1912.09323, 2019.
- [42] Thomas Schlegl, Philipp Seeböck, Sebastian M Waldstein, Georg Langs, and Ursula Schmidt-Erfurth. f-anogan: Fast unsupervised anomaly detection with generative adversarial networks. Medical image analysis, 54:30–44, 2019.
- [43] Hannah M Schlüter, Jeremy Tan, Benjamin Hou, and Bernhard Kainz. Self-supervised out-of-distribution detection and localization with natural synthetic anomalies (nsa). arXiv preprint arXiv:2109.15222, 2021.
- [44] Maximilian Schmidt and Marko Simic. Normalizing flows for novelty detection in industrial time series data. arXiv preprint arXiv:1906.06904, 2019.
- [45] Bernhard Schölkopf, Robert C Williamson, Alex Smola, John Shawe-Taylor, and John Platt. Support vector method for novelty detection. Advances in neural information processing systems, 12, 1999.
- [46] Jouwon Song, Kyeongbo Kong, Ye-In Park, Seong-Gyun Kim, and Suk-Ju Kang. Anoseg: Anomaly segmentation network using self-supervised learning. arXiv preprint arXiv:2110.03396, 2021.
- [47] Mingxing Tan and Quoc Le. Efficientnet: Rethinking model scaling for convolutional neural networks. In International Conference on Machine Learning, pages 6105–6114. PMLR, 2019.
- [48] Yonglong Tian, Dilip Krishnan, and Phillip Isola. Contrastive representation distillation. arXiv preprint arXiv:1910.10699, 2019.
- [49] Laurens Van der Maaten and Geoffrey Hinton. Visualizing data using t-sne. Journal of machine learning research, 9(11), 2008.
- [50] Ashish Vaswani, Noam Shazeer, Niki Parmar, Jakob Uszkoreit, Llion Jones, Aidan N Gomez, Łukasz Kaiser, and Illia Polosukhin. Attention is all you need. Advances in neural information processing systems, 30, 2017.
- [51] Guodong Wang, Shumin Han, Errui Ding, and Di Huang. Student-teacher feature pyramid matching for anomaly detection. arXiv preprint arXiv:2103.04257, 2021.
- [52] Tom Wehrbein, Marco Rudolph, Bodo Rosenhahn, and Bastian Wandt. Probabilistic monocular 3d human pose estimation with normalizing flows. Proceedings of the IEEE International Conference on Computer Vision, 2021.
- [53] Qinfeng Xiao, Jing Wang, Youfang Lin, Wenbo Gongsa, Ganghui Hu, Menggang Li, and Fang Wang. Unsupervised anomaly detection with distillated teacher-student network ensemble. Entropy, 23(2):201, 2021.
- [54] Vitjan Zavrtanik, Matej Kristan, and Danijel Skočaj. Draem-a discriminatively trained reconstruction embedding for surface anomaly detection. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 8330–8339, 2021.
- [55] Shuangfei Zhai, Yu Cheng, Weining Lu, and Zhongfei Zhang. Deep structured energy based models for anomaly detection. In Proceedings of the 33rd International Conference on International Conference on Machine Learning-Volume 48, pages 1100–1109, 2016.
- [56] Kai Zhang, Wangmeng Zuo, and Lei Zhang. Ffdnet: Toward a fast and flexible solution for cnn-based image denoising. IEEE Transactions on Image Processing, 27(9):4608–4622, 2018.
- [57] Chong Zhou and Randy C Paffenroth. Anomaly detection with robust deep autoencoders. In Proceedings of the 23rd ACM SIGKDD international conference on knowledge discovery and data mining, pages 665–674, 2017.