From NeRFs to Gaussian Splats, and Back
From NeRFs to Gaussian Splats, and Back
Siming He*, Zach Osman*, Pratik Chaudhari

Radiance††*Equal Contribution. General Robotics, Automation, Sensing and Perception (GRASP) Laboratory, University of Pennsylvania. Email: {siminghe, osmanz, pratikac}@seas.upenn.edu††Code and data are in https://github.com/grasp-lyrl/NeRFtoGSandBack.field-based scene representations are useful in robotics for localization and mapping [2, 3, 4, 5, 6, 7, 8], planning and control [9, 10, 11, 12, 13], scene understanding [14, 15], and simulation [16, 17, 18]. Often, the key question in these applications is whether one uses an implicit representation like a neural radiance field (NeRF) [19, 20] or an explicit representation, like 3D Gaussian Splatting (GS) [21, 22]. There are pros and cons for both.

| Nerfacto | NeRF-based approach in Nerfstudio |
| NeRF-SH | Our modified Nerfacto that predicts spherical harmonics for the color instead of the RGB intensity |
| Splatfacto | Gaussian Splatting approach in Nerfstudio |
| NeRFGS | Gaussian splats obtained from NeRF-SH, with or without further fine-tuning |
| GSNeRF | NeRF-SH converted from NeRFGS |
| RadGS | Gaussian Splatting trained using the pointcloud obtained from NeRF [23] |
| Iterations | Aspen | Giannini Hall | Wissahickon | Locust Walk | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| () | PSNR (Val) | SSIM | LPIPS | PSNR (Val) | SSIM | LPIPS | PSNR (Train/Val) | SSIM | LPIPS | PSNR (Train/Val) | SSIM | LPIPS | |
| Nerfacto-big [1] | 300 | 17.75 | 0.5 | 0.43 | 20.11 | 0.68 | 0.3 | 22.17 / 20.75 | 0.75 | 0.26 | 22.29 / 21.49 | 0.8 | 0.3 |
| Splatfacto [1] | 300 | 17.63 | 0.5 | 0.39 | 20.87 | 0.7 | 0.33 | 23.46 / 14.62 | 0.55 | 0.45 | 24.04 / 17.72 | 0.7 | 0.31 |
| NeRF-SH | 300 | 17.73 | 0.48 | 0.45 | 19.89 | 0.65 | 0.32 | 22.41 / 17.46 | 0.61 | 0.39 | 21.73 / 18.74 | 0.7 | 0.33 |
| RadGS [23] | 1 | 11.65 | 0.28 | 0.74 | 12.37 | 0.49 | 0.61 | 12.4 / 15.17 | 0.62 | 0.46 | 10.84 / 11.85 | 0.6 | 0.46 |
| RadGS [23] | 10 | 17.85 | 0.51 | 0.44 | 20.84 | 0.72 | 0.3 | 20.7 / 20.73 | 0.76 | 0.29 | 21.15 / 21.04 | 0.8 | 0.25 |
| NeRFGS | 0 | 13.96 | 0.3 | 0.58 | 16.19 | 0.47 | 0.49 | - / 14.40 | 0.47 | 0.51 | - / 14.87 | 0.51 | 0.47 |
| NeRFGS | 1 | 14.06 | 0.34 | 0.57 | 15.73 | 0.53 | 0.46 | 16.62 / 17.07 | 0.63 | 0.4 | 15.7 / 17.22 | 0.65 | 0.37 |
| NeRFGS | 10 | 17.7 | 0.51 | 0.4 | 21.05 | 0.73 | 0.26 | 20.67 / 20.64 | 0.75 | 0.27 | 21.11 / 21.14 | 0.8 | 0.24 |
| GSNeRF | 50 | 18.1 | 0.44 | 0.44 | 21.22 | 0.69 | 0.31 | - / 17.65 | 0.63 | 0.39 | - / 19.32 | 0.71 | 0.33 |
| GSNeRF | 300 | 18.58 | 0.51 | 0.36 | 23.71 | 0.82 | 0.17 | - / 17.59 | 0.64 | 0.37 | - / 19.32 | 0.72 | 0.31 |
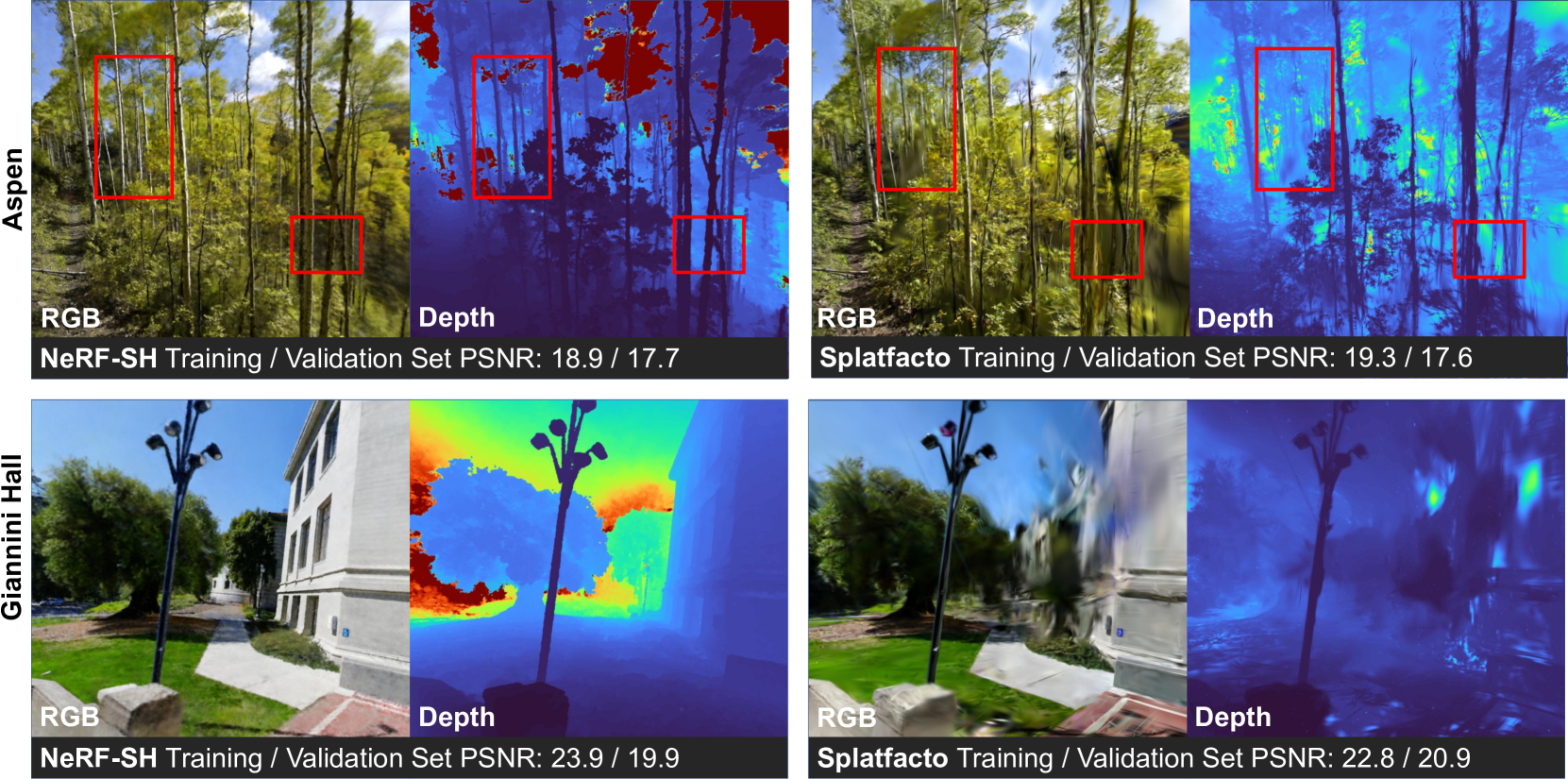
Imagine a quadruped robot walking along a road. It is important to ensure that the scene representation built from its ego-centric views generalizes to new views from the other side of the road. Non-parametric GS models perform well when train are plenty and test views are similar to train views [19, 24]. Parametric models like NeRFs work much better when train and test views are different from each other. See Figure 2. Heuristics to move, merge, and split the Gaussians in GS are brittle for in-the-wild data with exposure variations and motion blur [23]. Training of NeRFs is more stable and recovers better geometry with limited views. NeRFs are also a more compact representation and require less memory than GS. This is important for resource-constrained robots. The difference is rather obvious for distilled feature fields. NeRF-based methods [14, 25] can store high-dimensional features efficiently. GS-based methods [26, 27, 28] need additional steps to compress features.
Explicit representations can achieve faster rendering than implicit ones. High-speed rendering is important in robotics for localization (which requires checking many views to ascertain visual overlap with the current observation), planning (which requires synthesizing new views along putative trajectories), etc. Explicit representations can also be modified easily, e.g., by updating the Gaussians. This is useful for robots that operate in dynamic environments. Modifying implicit representations requires expensive re-training or complex modeling [29, 30, 31, 32, 33].
We develop a procedure to go back and forth between implicit and explicit representations. We evaluate the quality and efficiency of this approach using a number of existing datasets. We study this approach on views recorded from an ego-centric camera along hiking trails in situations when evaluation views are dissimilar to training views. We show that our approach achieves the best of both NeRFs (superior PSNR, SSIM, and LPIPS on the dissimilar views, and a compact representation) and GS (real-time rendering and ability for easily modifying the representation). The computational cost of converting between these representations is minor compared to training from scratch.
Results
Tab. 1 provides a brief summary of the the different approaches. We modify Nerfacto to predict spherical harmonics (degree 3, i.e., 16 coefficients) for each RGB channel. The volume rendering equation remains unchanged: we calculate the RGB color from spherical harmonics using the viewing direction before integrating it along the ray.
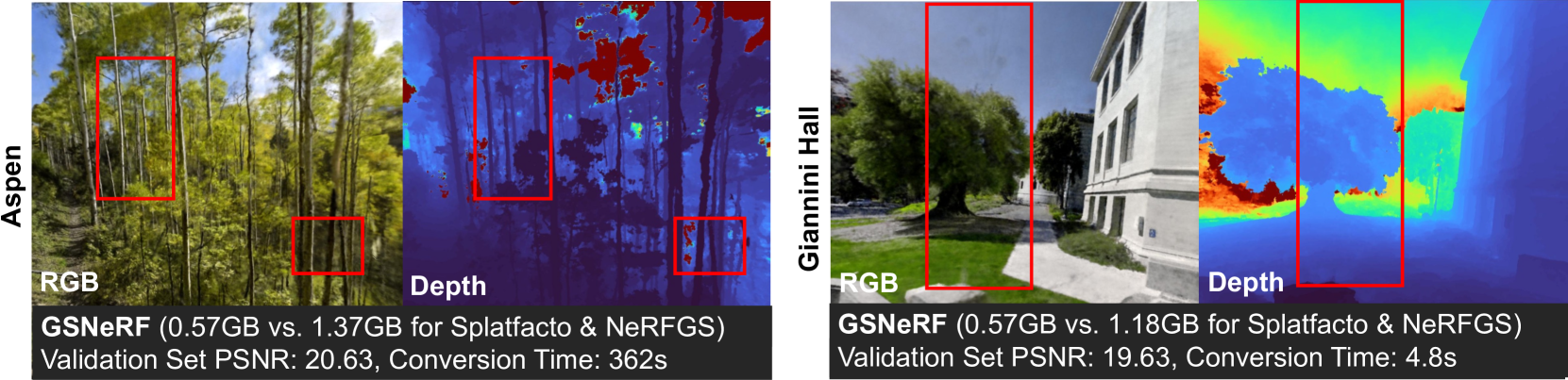
Given such a trained “NeRF-SH”, we calculate a point-cloud of the scene using the median depth along 2 rays rendered from training views. We ensure that these rays have high opacity and do not correspond to the sky. Isotropic Gaussians are initialized at each of these points using the density and spherical harmonics predicted by the NeRF-SH. The scale of each Gaussian is half of the average distance between each point and its three nearest neighbors. Without any further optimization, this “NeRFGS” already captures geometric and photometric properties of the scene impressively well; see Figures 2 and 2. We can fine-tune it further using training views; see Figures 4 and 2.
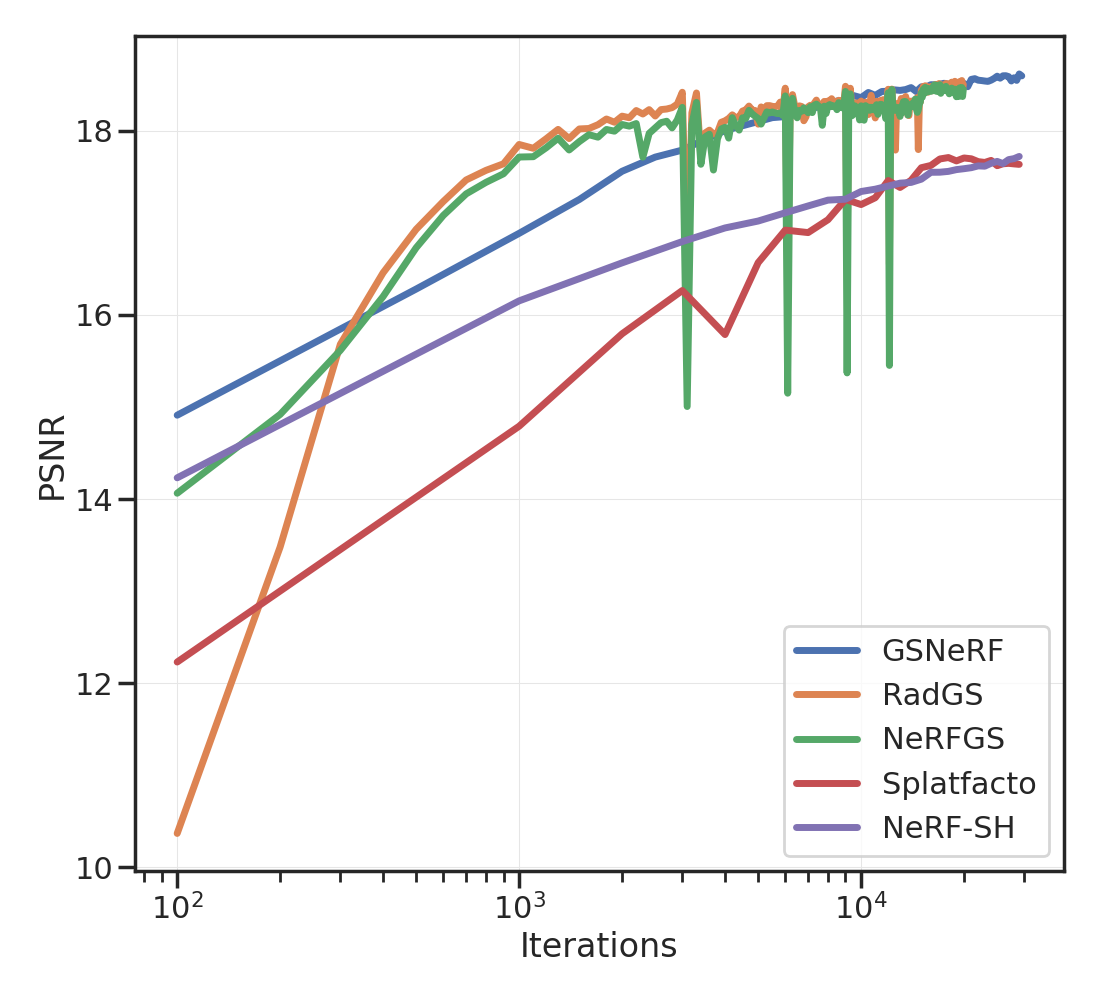
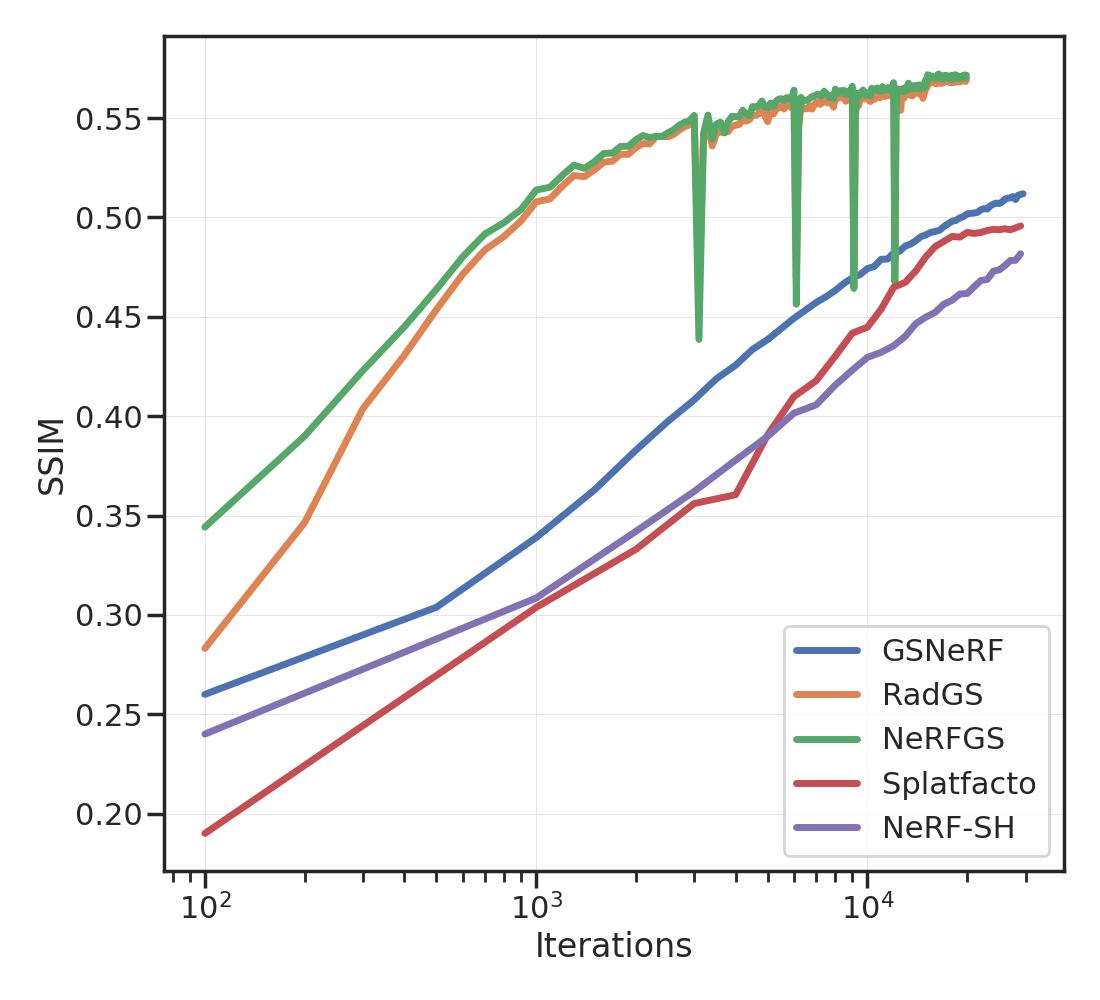
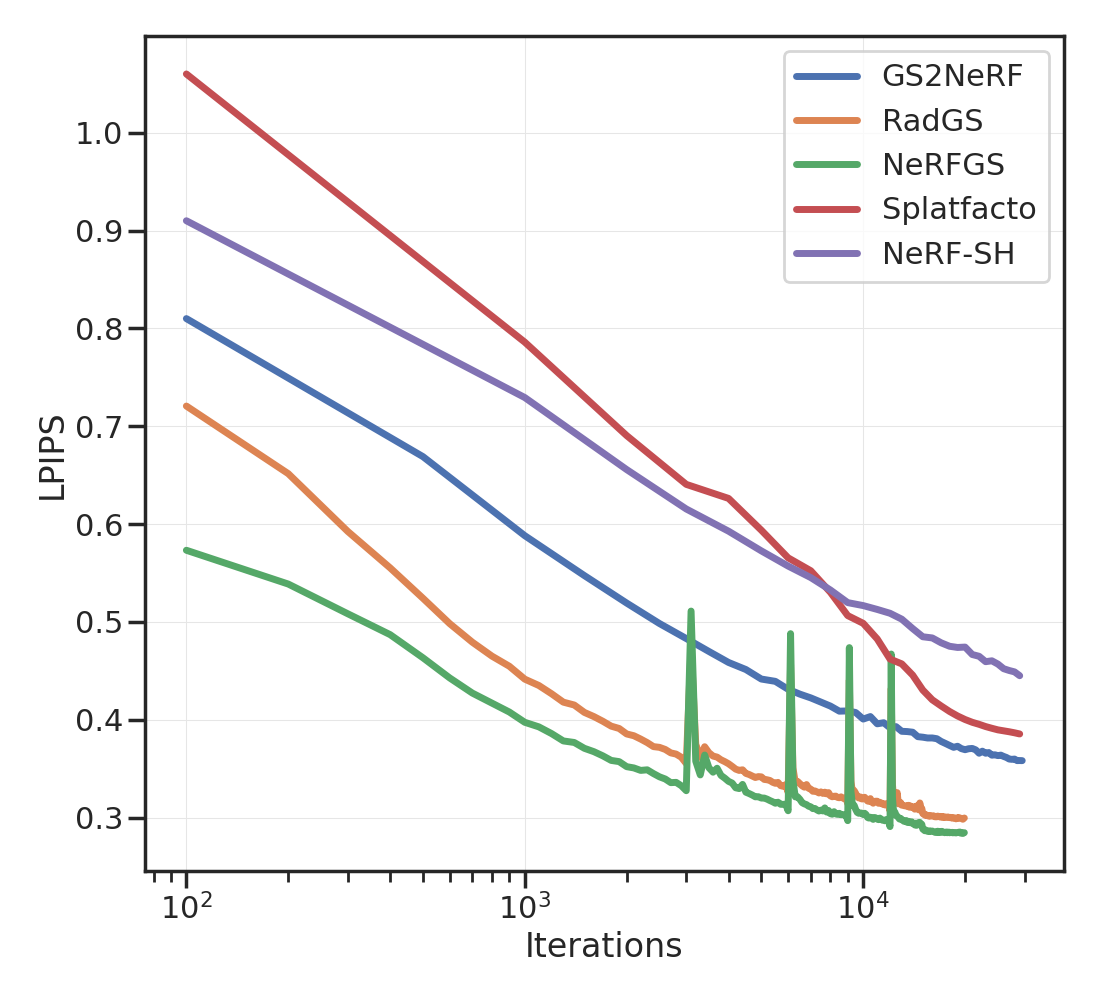
For GSNeRF, we render images using NeRFGS from training views, and fit or update a NeRF-SH. We noticed that training NeRFs using GS-rendered views gives better PSNR, SSIM, and LPIPS as compared to using the original images; see Figure 5 and Tab. 2. This is perhaps due to the absence of high-frequency structures in the GS-rendered views. One might also be interested in converting an explicit representation back into an implicit one. We show an example in Figure 4 where we manually edit out the lamp-post by selecting the corresponding splats in NeRFGS and updating the NeRF through GSNeRF in 4.8 sec.
Discussion
We demonstrated a simple procedure to convert between implicit representations of the scene such as NeRFs and explicit representations such as Gaussian splatting (GS). These ideas are useful to handle situations with sparse views, which are commonly encountered in robotics. There are many ways one might build upon this work. Notice that in Tab. 2 the PSNR of NeRFGS without fine-tuning is lower than that of NeRF-SH. This indicates that there is a large degree of inefficiency in how we convert NeRF-SH into the explicit representation.
References
- Tancik et al. [2023] Matthew Tancik, Ethan Weber, Evonne Ng, Ruilong Li, Brent Yi, Justin Kerr, Terrance Wang, Alexander Kristoffersen, Jake Austin, Kamyar Salahi, Abhik Ahuja, David McAllister, and Angjoo Kanazawa. Nerfstudio: A modular framework for neural radiance field development. In ACM SIGGRAPH 2023 Conference Proceedings, SIGGRAPH ’23, 2023.
- Sucar et al. [2021] Edgar Sucar, Shikun Liu, Joseph Ortiz, and Andrew J. Davison. imap: Implicit mapping and positioning in real-time. In Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV), pages 6229–6238, October 2021.
- Rosinol et al. [2023] Antoni Rosinol, John J. Leonard, and Luca Carlone. Nerf-slam: Real-time dense monocular slam with neural radiance fields. In 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 3437–3444, 2023. doi: 10.1109/IROS55552.2023.10341922.
- Huang et al. [2024a] Huajian Huang, Longwei Li, Hui Cheng, and Sai-Kit Yeung. Photo-slam: Real-time simultaneous localization and photorealistic mapping for monocular, stereo, and rgb-d cameras, 2024a.
- Yugay et al. [2023] Vladimir Yugay, Yue Li, Theo Gevers, and Martin R. Oswald. Gaussian-slam: Photo-realistic dense slam with gaussian splatting, 2023.
- Keetha et al. [2024] Nikhil Keetha, Jay Karhade, Krishna Murthy Jatavallabhula, Gengshan Yang, Sebastian Scherer, Deva Ramanan, and Jonathon Luiten. Splatam: Splat, track & map 3d gaussians for dense rgb-d slam, 2024.
- Matsuki et al. [2024] Hidenobu Matsuki, Riku Murai, Paul H. J. Kelly, and Andrew J. Davison. Gaussian splatting slam, 2024.
- Yan et al. [2024] Chi Yan, Delin Qu, Dan Xu, Bin Zhao, Zhigang Wang, Dong Wang, and Xuelong Li. Gs-slam: Dense visual slam with 3d gaussian splatting, 2024.
- Adamkiewicz et al. [2022] Michal Adamkiewicz, Timothy Chen, Adam Caccavale, Rachel Gardner, Preston Culbertson, Jeannette Bohg, and Mac Schwager. Vision-only robot navigation in a neural radiance world. IEEE Robotics and Automation Letters, 7(2):4606–4613, 2022. doi: 10.1109/LRA.2022.3150497.
- He et al. [2024] Siming He, Christopher D. Hsu, Dexter Ong, Yifei Simon Shao, and Pratik Chaudhari. Active perception using neural radiance fields, 2024.
- Liu et al. [2024] Guangyi Liu, Wen Jiang, Boshu Lei, Vivek Pandey, Kostas Daniilidis, and Nader Motee. Beyond uncertainty: Risk-aware active view acquisition for safe robot navigation and 3d scene understanding with fisherrf, 2024.
- Lei et al. [2024] Xiaohan Lei, Min Wang, Wengang Zhou, and Houqiang Li. Gaussnav: Gaussian splatting for visual navigation, 2024.
- Li et al. [2021a] Yunzhu Li, Shuang Li, Vincent Sitzmann, Pulkit Agrawal, and Antonio Torralba. 3d neural scene representations for visuomotor control, 2021a.
- Shen et al. [2023] William Shen, Ge Yang, Alan Yu, Jansen Wong, Leslie Pack Kaelbling, and Phillip Isola. Distilled feature fields enable few-shot language-guided manipulation. In 7th Annual Conference on Robot Learning, 2023.
- Yang et al. [2023] Jiawei Yang, Boris Ivanovic, Or Litany, Xinshuo Weng, Seung Wook Kim, Boyi Li, Tong Che, Danfei Xu, Sanja Fidler, Marco Pavone, and Yue Wang. Emernerf: Emergent spatial-temporal scene decomposition via self-supervision, 2023.
- Byravan et al. [2022] Arunkumar Byravan, Jan Humplik, Leonard Hasenclever, Arthur Brussee, Francesco Nori, Tuomas Haarnoja, Ben Moran, Steven Bohez, Fereshteh Sadeghi, Bojan Vujatovic, and Nicolas Heess. Nerf2real: Sim2real transfer of vision-guided bipedal motion skills using neural radiance fields, 2022.
- Cleac’h et al. [2023] Simon Le Cleac’h, Hong-Xing Yu, Michelle Guo, Taylor A. Howell, Ruohan Gao, Jiajun Wu, Zachary Manchester, and Mac Schwager. Differentiable physics simulation of dynamics-augmented neural objects, 2023.
- Xu et al. [2024] Xiaohao Xu, Tianyi Zhang, Sibo Wang, Xiang Li, Yongqi Chen, Ye Li, Bhiksha Raj, Matthew Johnson-Roberson, and Xiaonan Huang. Customizable perturbation synthesis for robust slam benchmarking, 2024.
- Mildenhall et al. [2020] Ben Mildenhall, Pratul P. Srinivasan, Matthew Tancik, Jonathan T. Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view synthesis. In ECCV, 2020.
- Müller et al. [2022] Thomas Müller, Alex Evans, Christoph Schied, and Alexander Keller. Instant neural graphics primitives with a multiresolution hash encoding. ACM Trans. Graph., 41(4):102:1–102:15, July 2022. doi: 10.1145/3528223.3530127. URL https://doi.org/10.1145/3528223.3530127.
- Kerbl et al. [2023] Bernhard Kerbl, Georgios Kopanas, Thomas Leimkühler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering. ACM Transactions on Graphics, 42(4), July 2023. URL https://repo-sam.inria.fr/fungraph/3d-gaussian-splatting/.
- Huang et al. [2024b] Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2d gaussian splatting for geometrically accurate radiance fields, 2024b.
- Niemeyer et al. [2024] Michael Niemeyer, Fabian Manhardt, Marie-Julie Rakotosaona, Michael Oechsle, Daniel Duckworth, Rama Gosula, Keisuke Tateno, John Bates, Dominik Kaeser, and Federico Tombari. Radsplat: Radiance field-informed gaussian splatting for robust real-time rendering with 900+ fps. arXiv.org, 2024.
- Barron et al. [2022] Jonathan T. Barron, Ben Mildenhall, Dor Verbin, Pratul P. Srinivasan, and Peter Hedman. Mip-nerf 360: Unbounded anti-aliased neural radiance fields. CVPR, 2022.
- Kerr et al. [2023] Justin* Kerr, Chung Min* Kim, Ken Goldberg, Angjoo Kanazawa, and Matthew Tancik. Lerf: Language embedded radiance fields. In International Conference on Computer Vision (ICCV), 2023.
- Shi et al. [2023] Jin-Chuan Shi, Miao Wang, Hao-Bin Duan, and Shao-Hua Guan. Language embedded 3d gaussians for open-vocabulary scene understanding. arXiv preprint arXiv:2311.18482, 2023.
- Qin et al. [2023] Minghan Qin, Wanhua Li, Jiawei Zhou, Haoqian Wang, and Hanspeter Pfister. Langsplat: 3d language gaussian splatting. arXiv preprint arXiv:2312.16084, 2023.
- Zuo et al. [2024] Xingxing Zuo, Pouya Samangouei, Yunwen Zhou, Yan Di, and Mingyang Li. Fmgs: Foundation model embedded 3d gaussian splatting for holistic 3d scene understanding, 2024.
- Park et al. [2021] Keunhong Park, Utkarsh Sinha, Jonathan T. Barron, Sofien Bouaziz, Dan B Goldman, Steven M. Seitz, and Ricardo Martin-Brualla. Nerfies: Deformable neural radiance fields. ICCV, 2021.
- Pumarola et al. [2020] Albert Pumarola, Enric Corona, Gerard Pons-Moll, and Francesc Moreno-Noguer. D-NeRF: Neural Radiance Fields for Dynamic Scenes. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2020.
- Li et al. [2021b] Zhengqi Li, Simon Niklaus, Noah Snavely, and Oliver Wang. Neural scene flow fields for space-time view synthesis of dynamic scenes, 2021b.
- Fang et al. [2022] Jiemin Fang, Taoran Yi, Xinggang Wang, Lingxi Xie, Xiaopeng Zhang, Wenyu Liu, Matthias Nießner, and Qi Tian. Fast dynamic radiance fields with time-aware neural voxels. In SIGGRAPH Asia 2022 Conference Papers, 2022.
- Li et al. [2023] Zhengqi Li, Qianqian Wang, Forrester Cole, Richard Tucker, and Noah Snavely. Dynibar: Neural dynamic image-based rendering. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2023.