Sparse-DeRF: Deblurred Neural Radiance Fields from Sparse View
Abstract
Recent studies construct deblurred neural radiance fields (DeRF) using dozens of blurry images, which are not practical scenarios if only a limited number of blurry images are available. This paper focuses on constructing DeRF from sparse-view for more pragmatic real-world scenarios. As observed in our experiments, establishing DeRF from sparse views proves to be a more challenging problem due to the inherent complexity arising from the simultaneous optimization of blur kernels and NeRF from sparse view. Sparse-DeRF successfully regularizes the complicated joint optimization, presenting alleviated overfitting artifacts and enhanced quality on radiance fields. The regularization consists of three key components: Surface smoothness, helps the model accurately predict the scene structure utilizing unseen and additional hidden rays derived from the blur kernel based on statistical tendencies of real-world; Modulated gradient scaling, helps the model adjust the amount of the backpropagated gradient according to the arrangements of scene objects; Perceptual distillation improves the perceptual quality by overcoming the ill-posed multi-view inconsistency of image deblurring and distilling the pre-filtered information, compensating for the lack of clean information in blurry images. We demonstrate the effectiveness of the Sparse-DeRF with extensive quantitative and qualitative experimental results by training DeRF from 2-view, 4-view, and 6-view blurry images.
Index Terms:
Neural Radiance Fields, Deblurring, Novel View Synthesis, 3D Synthesis, Neural Rendering, Sparse View settingI Introduction
Representing 3-dimensional (3D) space from multi-view images has rapidly grown after the emergence of the neural radiance fields (NeRF), which maps continuous spatial coordinates to volume density and radiance fields. Its realistic rendering quality and simple architecture have led to widespread applications and collaborations with various research fields in computer vision and graphics. As practical applications of NeRF continue to attract attention, research in real-world scenarios has emerged as a promising research direction such as NeRF from noisy images or sparse view.
In real-world scenarios, tackling the blurry images from camera motion is regarded to be important since users often encounter degraded images when capturing photos with their own devices due to the unintentional camera movement during exposure time. To solve this problem, several NeRF studies [1, 2, 3] have attempted to construct deblurred neural radiance fields (hereafter, DeRF) from blurry images using joint optimization of internal implicit blur kernel and radiance fields, but they use dozens of blurry images to train, which is actually not practical scenarios. The assumed experimental environments, where radiance fields are trained from about 20 to 30 blurry images, seem unlikely to occur in reality Hence we delve into the practical consideration for situations where only blurry images are utilized. We reasoned that situations requiring the use of only blurry images would arise when the available images for reconstructing the desired 3D space are both very limited and blurry. Following this rationale, we propose a novel pragmatic scenario for radiance fields from blurry images that establish the DeRF from sparse view settings. Specifically, we set the 2-view, 4-view, and 6-view settings based on our consideration of the practical applications of research on generating radiance fields from blurry images.
Actually, the NeRF system already has an inherent drawback: it is prone to be overfitted to training views and struggles to grasp correct geometry when only sparse view inputs are available. Moreover, we experimentally find that blurred images lead to more severe overfitting in DeRF from sparse view because blur kernels introduce a more complex optimization process compared to standard NeRF. Due to the increased complexity, DeRF training suffers more structural distortion than general NeRFs when trained from sparse view, exhibiting further overfitting with floating artifacts as shown in our experiments. Although there are several works [4, 5, 6] to regularize radiance fields in sparse view scenarios, existing regularization methods are not effective in addressing the complex optimization issue of DeRF as demonstrated in comparative experiments using existing representative regularization techniques in sparse view NeRF and blur kernel of the DeRF, namely RegNeRF [6] and DP-NeRF [2]. Furthermore, in the DeRF system, it is challenging to use other data-deriven priors such as predicted depth supervision since available images do not ensure the confidence of the estimated values due to the inherent degradation of the given images. Therefore, our goal is to regularize the complex joint optimization of blur kernel and radiance fields for DeRF to enhance the structural and perceptual quality of radiance fields from sparse blurry images, overcoming the aforementioned challenging issues.
In this paper, we propose for the first time to ameliorate the spatial ambiguity and enhance the sharp texture of the DeRF from sparse view, which we refer to as Sparse-DeRF. We introduce a novel regularization method for easing complex joint optimization, which consists of two geometric constraints and a perceptual prior. Geometric constraints are proposed to predict the accurate structure in radiance fields from sparse view, which consists of surface smoothness (SS) and modulated gradient scaling (MGS). First, SS rectifies the overall geometry based on classical depth smoothness on integrated unobserved rays as similar to RegNeRF [6]. We utilize the novel hidden rays in camera motion cues derived from blur kernels as additional out-of-distribution unobserved rays to reflect the statistical flatness of real-world geometry as [7, 6] argued. Second, MGS is designed to flexibly modulate the scaling function to compensate for the gradients based on the arrangement of the scene components, which cannot be handled by a single scaling function in non-parameterized coordinate systems such as normalized device coordinates (NDC). It alleviates the spatial ambiguity arising from ray sampling and the disproportionate gradients of NeRF by introducing a parameterized sinusoidal function as a novel scaling function. These two geometric constraints improve the structural scene geometry of radiance fields even without explicit depth supervision in a sparse view setting.
In addition to geometric constraints, we propose the perceptual distillation (PD) as a perceptual prior to enhance the detailed texture of the radiance fields by taking advantage of the previously established image deblurring algorithm. Traditional image deblurring has shown significant performance improvements alongside the advancement of deep learning, demonstrating more enhanced details and textures. We believe that the sharp texture information from such deblurred images can be used as additional complementary information to achieve high fidelity in the Sparse-DeRF environment, where only a few degraded images are available to reconstruct the scene. However, while we can take the pre-filtered images with a pre-trained deep learning-based image deblurring model, the independence of image deblurring poses challenges in directly utilizing deblurred images as pixel-wise color supervision, due to inconsistency across the given images. This inconsistency comes from the inherent ill-posed property of the image deblurring that breaks the geometric and appearance consistency across the multi-view images of the single 3D scene. Hence, we impart the perceptual information of pre-filtered images to the radiance fields by distilling the features extracted from the deep learning-based image feature extractor. Extracted features enable the radiance fields to enhance perceptual quality by utilizing pre-deblurred textures.
Our results illustrate that the Sparse-DeRF produces high-quality rendered images from sparse blurry images, with improved perceptual texture quality and well-structured scene geometry. Additionally, we demonstrate the effectiveness of the proposed constraints and a prior through experimental results and analysis. Furthermore, we conduct comprehensive experiments to investigate ablations using two types of representative blur kernels from Deblur-NeRF [1] and DP-NeRF [2]. These experiments aim to show the superiority of the proposed regularization method and analyze its effects depending on the type of kernel employed.
II Related Work
II-A Neural Rendering and Radiance Fields
Traditionally, researchers have been required to know the physical properties of a scene to simulate the rendering process for generating photorealistic images from 3D space. While rendering simulations facilitated the synthesis of controllable high-quality images across the 3D scene, the quality of the synthesized image significantly depends on the physical properties involved in the rendering process. For real-world scenes, estimation of the properties which is referred to as ”inverse rendering” is required, but it is difficult to predict them accurately solely depending on 2D observations like images and videos. Although several approaches have been attempted to overcome the challenges, ”neural rendering” has recently emerged as a superior approach integrating deep learning methodologies and graphics rendering approaches, leveraging the outstanding representation capability of deep neural networks.
According to a comprehensive survey [8], which well summarizes the history of early neural rendering, this research area has been regarded as the intersection of generative adversarial networks (GANs) [9] and graphical controllable image synthesis. With the adoption of GANs, neural rendering has been considered as an image-to-image translation problem utilizing given scene parameters and several 3D scene representations, leveraging the insights of conditional GANs similar to Pix2Pix [10]. For example, [11, 12, 13] generate high-quality images with particular scene conditions by transferring scene parameters to the deep neural network. In addition, other works incorporate the intuition of classical graphics modules into GANs to synthesize and control the image outputs utilizing non-differentiable or differentiable modules such as usage of rendered images with dense input conditioning [14, 11, 15], computer graphics renderer [16, 17], and illumination model [18].
Although these researches present realistic neural rendering techniques over the past few years, there has been great transition in paradigm in neural rendering after emergence of the neural radiance fields (NeRF) [19], which directly map 3D spatial location and viewing direction to irradiance solely relying on multi-view images through multi-layer perceptron (MLP) and classical volume rendering method [20]. NeRF implicitly represents the 3D scene with the classical ray tracing methods and shows photorealistic novel view synthesis, but there is still room for improvement in various aspects. NeRF has widely spread to other computer vision and graphics tasks thanks to its simple and intuitive architecture, which attracts huge attention and expands the research fields of neural rendering. To enhance the performance of neural representation itself, several works have represented 3D scenes using another representation to improve training or rendering speed, such as voxel-grid [21], plenoctree [22], decomposed tensorial fields [23], hashgrid [24], plenoxels [25], light fields [26], and 3D gaussians [27]. In addition, its implicit representation capability leads to explosive development of other graphical tasks such as modeling dynamic scenes [28, 29, 30, 31], relighting [32, 33], 3D reconstructions [34, 35], and human avatar [36].
II-B Radiance Fields in Practical Scenarios
There have been a lot of works to apply the neural representation in more pragmatic scenarios as the importance of VR and AR technologies increased, such as fast rendering, efficient sampling on rays, scene editing, denoising, and training from sparse view. Fast rendering, efficient sampling on rays, and scene editing aim to increase the inference speed, enable surface sampling, and deform the trained mesh through various approaches, such as baking [37], depth-guided sampling [38], and surface deformation [39], respectively.
Another dominant area is constructing the NeRF from sparse view images, which is a practical environment considering real-world scenarios. Sparse view images incur the inherent drawback of neural networks in that the network is more likely to be overfitted to the given data distribution. This leads to inconsistent scene geometry in the mapped representations, typically manifested as incorrectly predicted structural information, such as elongated density artifacts in the rendered color and depth images from novel views. Several approaches have mitigated this issue involving additional prior knowledge or out-of-distribution data. InfoNeRF [40] adopts entropy minimization to probability density function (PDF) of density value along the ray density to make the shape of the PDF sharper. RegNeRF [6] utilizes the statistical depth smoothness of real-world geometry [7] on unobserved ray patches to reduce the artifact. Recently, FlipNeRF [5] considers flipped rays on the surface as supplement unseen rays to regularize the scene geometry. In other approaches, some works, such as PixelNeRF [41], and DietNeRF [42], exploit the semantic information extracted from deep image feature extractors to utilize the representative power of neural networks in feature level. FreeNeRF [4] tries to alleviate the overfitting problem based on an optimization perspective, imposing some restrictions on the frequency level.
In addition to sparse view settings, establishing NeRF from degraded images is recently emerging since the ideal training condition in images for NeRF often breaks in real-world scenarios. RawNeRF [43] denoises the internal noise of the camera sensor to construct high dynamic range (HDR) radiance fields from dark raw images and controls the camera exposure. Similarly, NaN [44] deals with burst noise in images, generating denoised images based on IBRNet [45], which is another image-based rendering approach. For more practical applications of NeRF in real-world, DeblurNeRF [1] firstly attempts to deal with two types of blur degradation in images, blur from camera motion and defocus, constructing deblurred neural radiance fields (DeRF) from only blurry images. They imitate the blurring process integrating the concept of blind deblurring in image deblurring with the NeRF system, modeling the blur kernel as pixel-wise independent ray transformation and composition weights to approximate the blurring process. Another representative approach is proposed by DP-NeRF[2], which imposes physical consistency across the images by modeling the blur kernel as the 3D rigid transformation of rays depending on each view, to approximate the actual blurring process in the camera more precisely. Recently several approaches [46, 47, 3] are also proposed in succession, attempting to improve the quality of the constructed DeRF. One of the most actively researched areas among those mentioned earlier is NeRF from blurry images, which often occurs when users take pictures with their own devices.
However, as we mentioned in Section I, the experimental setup of using only 2030 blurry images, as in previous studies, is not practical. If we assume a scenario where users only have access to blurry images, it is more realistic to consider that only a few images are available for a specific scene and all of those images are blurry. Therefore, we propose a more practical scenario by combining DeRF and the sparse view setting, thereby enhancing real-world applicability.
III preliminary
III-A Deblurred Neural Radiance Fields
Neural radiance fields (NeRF) is parameterized MLPs for mapping continuous 3D location to volumetric density and view-dependent radiance color . It is formulated as an approximated universal function , where and denote the parameters of the NeRF MLPs and viewing direction of ray, respectively. The function is a positional encoding function that maps each input x and d to a high dimensional encoded feature, which is generally defined as a concatenation of frequency-adjusted sinusoidal function as Eq. 1.
| (1) |
where denotes frequency band with maximum frequency value . Hereafter, we abbreviate the encoding function and represent the function of the NeRF as
| (2) |
NeRF is trained with pixel-wise color supervision from multi-view input images to optimize the MLPs by predicting each pixel color based on volumetric rendering [48] with the samples along the generated ray r from paired camera parameters. For given ray origin o and viewing direction d along a pixel , the samples along the ray r are evenly divided to intervals to generate coarse samples with stratified sampling. The samples are defined as in near-to-far bounded partitions as shown in Eq.3, where indicates i-th sample and denotes the distance from ray origin.
| (3) |
Following the [48], the coarse pixel color is rendered from estimated color and density of each sample as
| (4) |
where and indicate transmittance of each sample along the ray and distance between adjacent samples, respectively. Hierarchical volume sampling is conducted again utilizing normalized weights as probability density function (PDF) from as and fine rendered pixel color is produced through above rendering process again. Coarse- and fine-rendered color is supervised from the true pixel colors from input images through L2-norm as
| (5) |
where is the set of rays in each batch and C(r) is ground truth RGB colors for ray r.
However, the above loss can not be applied to train the DeRF, since there is no true pixel color for training the NeRF in the DeRF environments. To solve this problem and construct DeRF, [1, 2] build additional MLPs for predicting the blur kernel in front of the NeRF to imitate the traditional blind blurring process, which is shown as Eq.6.
| (6) |
where , , , and indicate the target pixel, expected blurred color, convolution operator, and blur kernel, respectively. Hereafter, we abbreviate the for clarity. The expected blurred color is composited from rendered pixel colors induced from modeled rays that approximate the blurring process as Eq.7.
| (7) |
where and denote composition weights and the set of indices of the approximated blurring rays with respect to pixel , respectively. Note that, the number of is , which is a hyper-parameter that decides the approximation quality of discrete transformation for blur process. Finally, DeRF is trained with the color reconstruction loss on blurred colors as
| (8) |
where , , and are expected coarse, fine, and ground truth blurred color of the ray r, respectively.
The blur kernels are representatively modeled as a different type of transformation in each paper, [1, 2], which we will describe in the next paragraph. After the joint training of the approximated blur kernel and NeRF simultaneously, they can render the clean neural radiance fields, which we refer to as deblurred neural radiance fields (DeRF), by evaluating only NeRF thanks to the theoretical basis of blind deblurring.
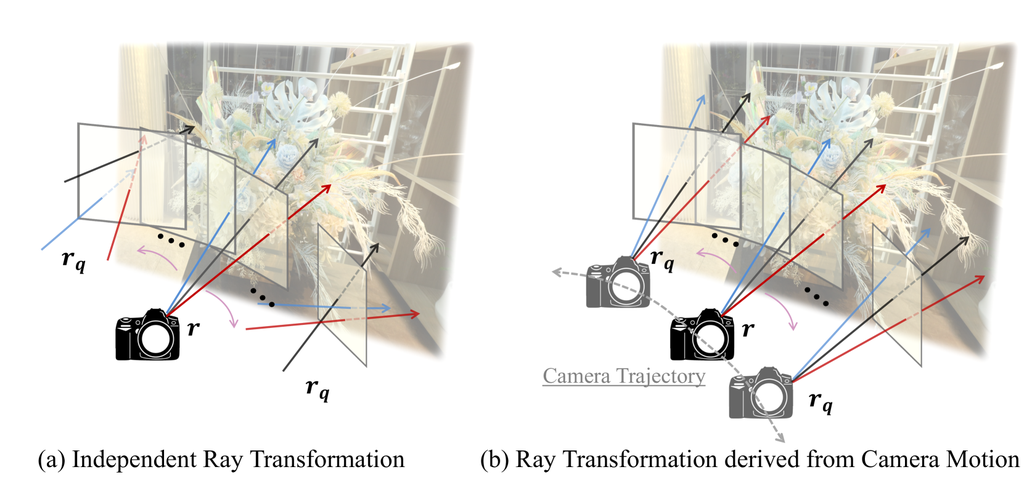
III-B Blur Kernels in Deblurred Neural Radiance Fields
The core difference of the blur kernels between the two papers is a consideration of 3D consistency across the entire pixels in each image as we describe in Figure 1. Deblur-NeRF [1] designs the blur kernel as a deformable sparse kernel (DSK), which consists of the number of transformations depending on embedded latent features from each view and location of image pixels. The transformation is formulated as the 3D vector of ray origin and 2D vector of pixel coordinate, which is initialized within window on the image plane as
| (9) |
For , MLP with parameter , inputs are and , which are latent embedded pixel coordinates and scene information, respectively. Here, is defined as randomly initialized canonical coordinates within a specific small range and indicates the specific scene. The 3D vector and transform given ray to generate transformed rays imitating blurring process as Eq.10.
| (10) |
where is transformed ray direction by applying to pixel coordinates to move the endpoint of the ray. Then blurred color of the target pixel is composited by weighted summation of each rendered color and as Eq.7.
However, DP-NeRF [2] argues that the pixel-wise independent optimization of the blur kernel in [1] incurs inconsistency in 3D geometry and appearance. They utilize the physical intuition of actual blurred image acquisition in the camera process as an additional prior for the DeRF, to impose the constraints for constructing radiance fields while preserving 3D consistency. To directly model the actual camera motion as a 3D rigid transformation, they introduce scene-wise fields inspired by [29], [49] and Rodrigues’ formula [50]. Scene-wise rigid transformation of the camera is formulated by estimated screw axis through MLPs depending on only scene information as Eq.11.
| (11) |
where and denote MLP with parameter and latent embedded scene information, respectively. The predicted and of are converted to rotation matrix and translation matrix by formulas of [50] and [49], respectively. Note that, we abbreviate specific scene indicator for clarity. Hence, transformed rays are formulated as the rigid transformation of the rays as Eq.12.
| (12) |
The blurred color of the target pixel is also composited by weighted summation of each rendered color and as same as Eq.7. In addition to modeling the blurring process with rigid blur kernel (RBK), [2] proposes an adaptive weight proposal network (AWP) based on the internal correlation between transformed rays and motion axis to predict the adaptive composition weights for each pixel, which complements the effect on the blur derived from the depth difference.
In this paper, we present a novel approach that includes geometric constraints and a perceptual prior through extensive experiments based on these two types of blur kernels from Ddeblur-NeRF [1] and DP-NeRF [2], which can be regarded as flexible and rigid kernels, respectively. The conducted experiments demonstrate the effectiveness of Sparse-DeRF on both kernels. Furthermore, the results also reveal a trade-off for the flexibility of the kernels, depending on the specific properties inherent in the diverse scenes.
IV Sparse-DeRF
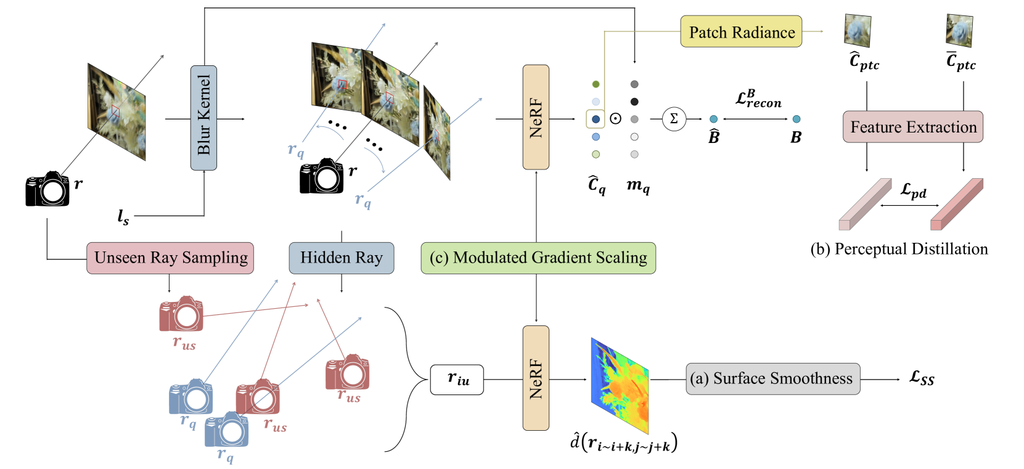
We find that it is not effective to construct the radiance fields based on naive NeRF, Deblur-NeRF [1], or DP-NeRF [2] from sparse view setting as we present in Section V-E. Although the DeRF usually recovers the high-frequency detail better than the naive NeRF in given views, it has become more fragmented in novel view synthesis, generating inaccurate scene geometry due to the complex joint optimization. The geometric error is represented as mapped RGB textures resembling painted walls in near or far depth and elongated density artifacts, which reveal challenges associated with accurate depth value prediction. However, existing representative regularization for the NeRF from sparse view [6] can not regularize complex joint optimization of the DeRF. We present experimental results in Section V-F1, which shows the difficulty of the previous regularization technique on the DeRF from sparse view. Hence, here we describe our method for regularizing optimization of the DeRF from sparse view to alleviate spatial ambiguity, which consists of two geometric constraints and a perceptual prior. Figure 2 illustrates the overall architecture of the Sparse-DeRF in detail, where (a),(b), and (c) of the Figure 2 indicate each main component of the Sparse-DeRF, respectively. Geometric constraints consist of surface smoothness (SS) and modulated gradient scaling (MGS) as we describe in Section IV-A and Section IV-B. A perceptual prior consists of a perceptual distillation (PD) which is described in Section IV-C.
IV-A Surface Smoothness on Integrated Unobserved Rays
Inspired by the statistical tendencies of real-world geometry, piece-wise smoothness is adopted as a depth smoothness regularization on small rendered patches in RegNeRF [6]. This regularization can also be interpreted as imposing surface smoothness constraint, which is applied to the rendered depth obtained from unseen rays that are defined as rays not observed in the training inputs. The unseen rays are generated from possible camera locations sampled within a limited sample space, constrained by target poses for rendering during test time. Similar to the method introduced in [6], we adopted an approach to alleviate spatial ambiguity by utilizing information from unobserved rays. However, we propose additionally leveraging new unobserved ray information that can only be derived from the blur kernel to stabilize the simultaneous optimization of blur kernel and radiance fields. Firstly, we utilize unseen rays as one of the integrated unobserved rays to ameliorate spatial ambiguity following the [6]. For known set of camera poses , where , sampled camera pose for unseen rays is formulated from camera location and rotation in limited sample space as
| (13) | ||||
where , , , and indicate , , the normalized mean over the up axes of all target poses, and the mean focus point by solving a least squares problem, respectively. and indicate camera rotation matrix to make the sampled camera roughly focus on a central point of a scene and a small jitter value added to the focus point, respectively. To the end, sampled camera poses is formulated as
| (14) |
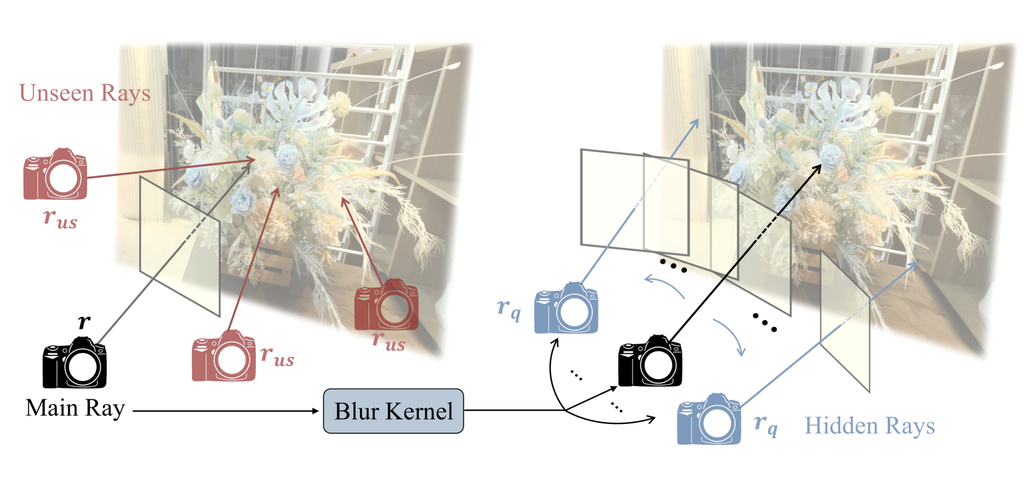
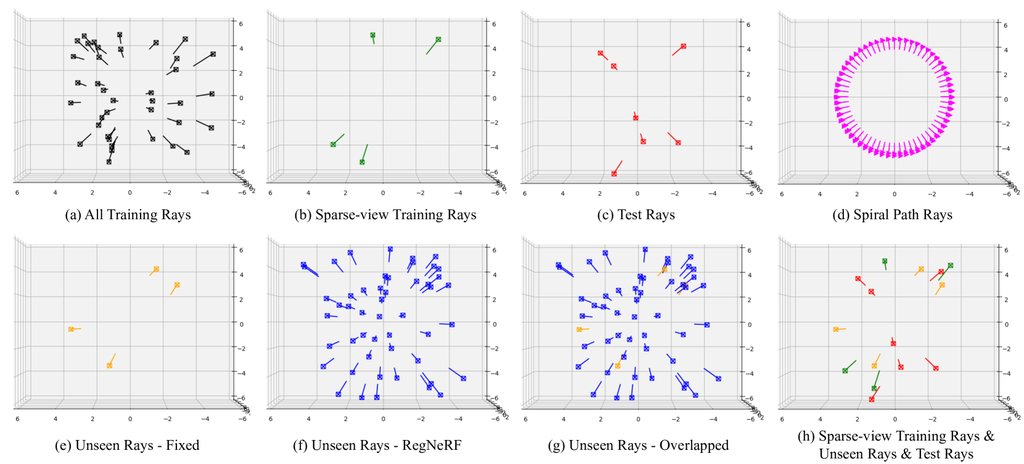
In addition to leveraging previously unseen rays, we employ hidden rays derived from the characteristics of the estimated blur kernel, harnessing supplementary information exclusively presented in blurry inputs. The blur kernel, denoted as in Eq. 6, generates the ray transformation to approximate the color composition process of the blur, regardless of the kernel types, as demonstrated in Deblur-NeRF [1] and DP-NeRF [2]. Motivated by the commonality in the color composition process across various blur kernels, the kernel-induced transformed rays are introduced as additional unobserved rays, which are referred to as hidden rays, to enforce depth smoothness constraint. As the hidden rays are not directly presented in the training data for the DeRF system, they serve as supplementary out-of-distribution data for imposing depth smoothness, similar to the aforementioned unseen rays. In addition, the incorporation of depth smoothness on hidden rays effectively addresses geometric inconsistency across the 3D space of blurry images within the specified training view. This capability stems from the broader coverage of the estimated hidden rays, facilitated by the implicit inclusion of camera motion information in blurry images. Therefore, our integrated unobserved rays for depth smoothness are defined as an integrated set of unseen rays and hidden rays as
| (15) |
where and denote integrated unobserved rays and unseen rays, respectively. For more intuitive understanding, the and are illustrated in Figure 3.
For applying depth smoothness constraint on , the expected depth of is computed following Eq.16 as same as previous NeRF works.
| (16) |
Then the depth smoothness loss is reformulated by adding color-dependent weighted depth smoothness from [6] as
| (17) |
where and indicates horizontal and vertial weighted depth difference as Eq.18, respectively.
| (18) | ||||
where indicates pixel-wise color difference weight.
IV-B Modulated Gradient Scaling
Although previous surface smoothness alleviates the spatial ambiguity in the 3D scene, it is still hard to grasp accurate geometry due to the inherent drawback of the NeRF sampling strategy and casted volume occupancy as [51] argued. Following [51], the optimization of the NeRF often fails, generating the density artifact in the near-depth region due to the disproportionate gradient backpropagation induced from the imbalanced volumetric occupancy of the samples on the ray. [51] alleviates the limitation introducing gradient scaling that reduces the propagated gradient of each -th sample on ray r according to the distance from ray origin o as
| (19) |
where and indicate scaled gradient value for sample and scaling function. The scaling function is strictly formulated as a squared function as
| (20) |
Note that, indicates the gradients of per-point characteristics such as RGB color c and density .
However, we experimentally found that the limitation is more prominent in sparse view settings since there is less available diversity of viewing direction, which means the projective geometry and epipolar geometry do not properly work for NeRF optimization. Therefore, the gradient scaling seems to be more necessary to the radiance fields from the sparse view setting. Although we tried to apply the technique to the Sparse-DeRF, it does not properly works as demonstrated in the appendix. The reason is that the fixed square function of , which is lower bounded as , does not cover the non-linear parametrized space such as normalized device coordinates (NDC), which is commonly used as well as our work. Another reason is that a strictly fixed shape of the function cannot cover the arrangements of the scene components, which are usually different across the scene even in the same dataset. [51] briefly mentioned the determinant of the jacobian as an additional scaling factor for the value of , but they did not experiment on it. Moreover, even if the additional scaling factor were applied, the shape of the scaling function would remain unchanged and simply in the form of the square function, which does not allow for flexible adaptation to the arrangement of scene components. Therefore, we modulate the shape of the scaling function to adaptively reflect the scene arrangements and be suitable for NDC.
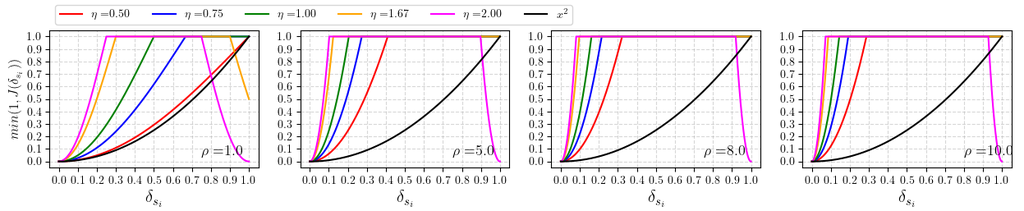
Our novel gradient scaling function is designed based on three conditions. First, the function should increase from zero at the camera origin, which is a critical condition to avoid the local minima in the initial training phase we mentioned before. Second, the function should be not zero in the far distance, which is set to in our NDC environment, to ensure the NeRF training. Finally, the function is designed to increase and decrease only once within a given depth range, which makes the function not fluctuate, since it is an intuitively reasonable scenario considering the goal of MGS that alleviates incorrect density mapping in near distance. In addition to the above conditions for proper shape of the scaling function, we further consider designing the function shape when the location of the main objects is focused on the center of the scene and density mapping error that is represented as a painted wall of near or far depth. Following the conditions, the proposed modulated gradient scaling (MGS) function is formulated as
| (21) |
where and denote magnitude and period of sinusoidal function, respectively. However, in contrast to [51], the distance range of is restricted to since we use NDC for our dataset.
To apply gradient scaling both in the near and far regions while minimizing the scaling effect in the center of the scene, we adopt the sinusoidal function shape as the foundation for our MGS. Furthermore, the second condition determines the maximum value of as 2 to ensure the scaling value of the proposed function in the far region does not fall to or below 0. The function shape in the left top image of Figure 4 shows the characteristics of the proposed scaling function that we described above. We shows the difference between the scaling value from and , according to the various and values in Figure 4.
IV-C Perceptual Distillation
In contrast to the previous NeRF-related works in sparse view settings, the Sparse-DeRF environments enable to use the off-the-shelf image processing algorithms, such as deep learning-based image deblurring networks, due to the degradation of the given images. In addition to improvements from a geometric perspective, we aim to enhance the detailed textures of DeRF utilizing the advantages of existing image processing modules, thereby achieving high fidelity.
However, it is not possible to directly utilize the pre-deblurred images as additional pixel-wise color supervision, due to the lack of 3D consistency. This inconsistency occurs due to the ill-posed property of image deblurring and independent deblurring processing across multi-view images, which generates incoherent deblurred results. In the appendix, we additionally address this issue and present the qualitative comparison of pre-deblurred images and reference images, which are estimated from the DP-NeRF [2] trained with the full view, to reveal the geometric inconsistency issue.
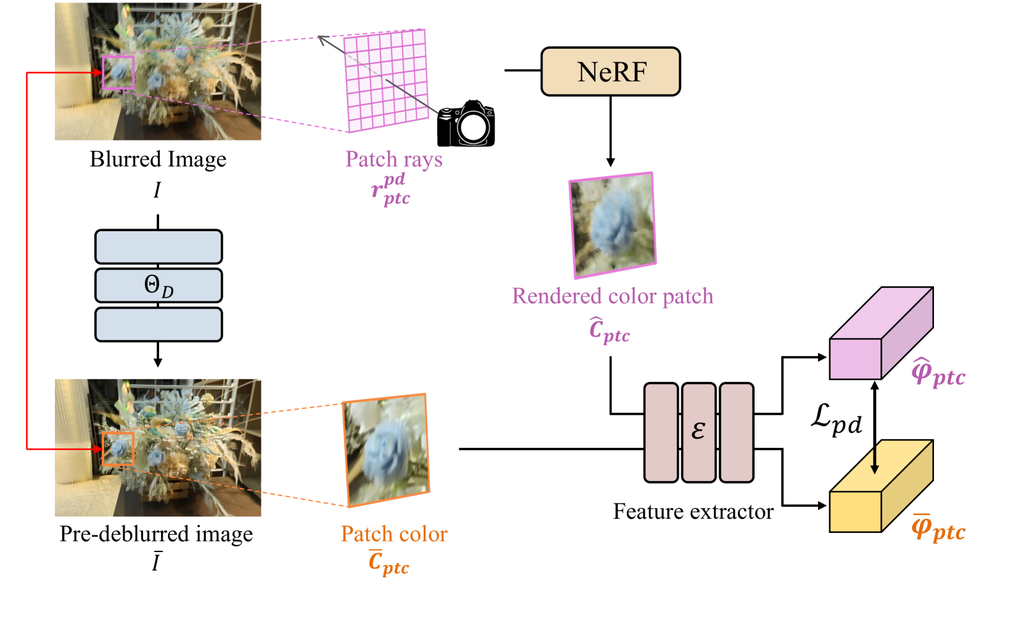
To overcome the intrinsic inconsistency of pre-deblurred images, we address the pre-filtered images as a perceptual prior, which transfers the deblurred texture information by extracting features from rendered patches and deblurred images with a pre-trained feature extractor. Figure 5 simply illustrates the pipeline of our perceptual distillation module.
Specifically, we first generate deblurred images for blurry training images by exploiting a pre-trained image deblurring network to prepare the feature extraction as
| (22) |
Next, we additionally sample the size of patch rays and corresponding deblurred image patch from on training views. Then we extract the abundant deblurred features from the rendered color patch , which is rendered from , and pre-deblurred images using a shared pre-trained image feature extractor as
| (23) |
where and indicate extracted features from each color patches, respectively. Note that, the color patch is rendered by forwarding the NeRF MLPs without blur kernel to perceptually transfer the pre-filtered texture information to the implicit clean radiance fields, which is indicated as patch radiance in Figure 2. Then we apply the perceptual loss [52] to distill the feature information as
| (24) |
Our final loss function is a weighted composition of the proposed losses as
| (25) |
where and denote weights for each loss, which are equally set to in our experiments.
V Experiments
V-A Dataset
Sparse-DeRF has experimented with a forward-facing scene dataset proposed by Deblur-NeRF [1], which includes 5 synthetic and 10 real scenes. In particular, we use only the camera motion blur dataset since our goal is to alleviate the blur from camera motion in the DeRF from sparse view settings. The dataset consists of multiple view images and paired camera poses calibrated by using COLMAP [53, 54]. For the sparse view setting, we manually select the 2, 4, and 6 images as training datasets for all scenes, so that the entire space covered by each view is as wide as possible. In addition, to ensure reasonable learning of radiance fields, we select views with visible spaces that overlap as little as possible, while avoiding excessively extreme blur magnitudes. Note that, it is an inherent property of the dataset that blur magnitudes of selected views can be different according to each scene, which means that each scene has a different level of learning difficulty. We attach the selected image indices of all scenes used in our experiments in the appendix for fair comparison in future research.
V-B Experimental Sparse View Setting
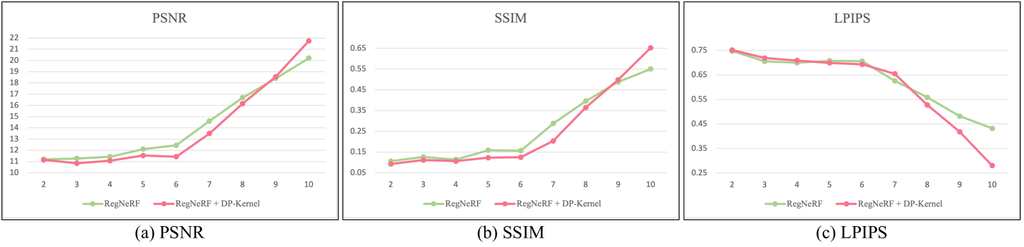
Scenarios for the Sparse-DeRF are assumed to be three kinds of settings, which are the DeRF from 2-view, 4-view, and 6-view settings unlike existing common sparse-view NeRFs, which usually use 3-view, 6-view, and 9-view settings. The reason is that when using more than 8 images, the joint optimization problem occurs more frequently under 9-view settings as shown in Figure 6. The figure presents the graph of experiments in the Decoration scene where we varied the number of input sparse views from 2-view to 10-view. We also attach the quantitative results in the appendix due to the page limitation. Experimental results reveal that our sparse-view experimental settings are valid since the RegNeRF [6] with DP-kernel shows poor performances under the 9 views.
V-C Implementation Details
Spare-DeRF is implemented and modified based on the published official code of DP-NeRF [2] using the two types of blur kernels of DP-NeRF [2] and Deblur-NeRF [1]. For a fair comparison, the number of blurring rays is set to for the default setting as same as previous works [1, 2]. We set the other settings for the blur kernels following the default parameters of each work. For the NeRF optimization, we use coarse and fine samples per ray with a batch size of 1024 rays, exploiting Adam [55] optimizer with default parameters. In addition, exponential weight decay is applied from to for learning rate scheduling. We train the DeRF for , , and iterations in 2-view, 4-view, and 6-view settings, respectively. For patch-wise sampling, we set the size of the patch and as and , respectively. However, the generating method of unseen rays in surface smoothness constraint is especially considered for fair comparison across the extensive experiments. In particular, we generate the unseen rays from fixed views, which are evenly selected from the rest of the training rays, to remove the randomness of the unseen ray generation for experimental analysis and fair comparison. Note that, the rest of the training rays are not included in the training or test view. We demonstrate that it is a reasonable choice since the selected views are still in the sample space we defined in Section IV-A. In addition, we attach the visualization of this issue in the appendix to show the rationality. The hyper-parameters of the modulated gradient scaling function for each scene, magnitude and period , are attached in the appendix in detail. For perceptual distillation, MPRNet [56] is utilized as a pre-trained image deblurring network. We select the VGG19 [57] as a pre-trained image feature extractor since it is widely exploited as an image feature extractor in image-based computer vision.
V-D Evaluation Metrics
Our experimental results for the synthetic and real datasets are evaluated in three quantitative metrics and qualitative comparisons between rendered images through a novel view synthesis task. Consistent with prior research, we employ widely utilized evaluation metrics to compare the synthesized images with corresponding ground truth images: the peak signal-to-noise ratio (PSNR), the structural similarity index measure (SSIM), and learned perceptual image patch similarity (LPIPS) [58]. These metrics assess the relative sharpness, structural similarity, and perceptual quality of the generated images, respectively. In addition, we encourage readers to refer to the supplementary video for a more comprehensive and detailed presentation of the results.
V-E Evaluation
| [ 2-view ] | [ 4-view ] | [ 6-view ] | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| [ Synthetic Scene ] | [ Real Scene ] | [ Synthetic Scene ] | [ Real Scene ] | [ Synthetic Scene ] | [ Real Scene ] | |||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| Naive NeRF [19] | 15.11 | .2999 | .5578 | 14.38 | .2635 | .6004 | 20.02 | .5327 | .4000 | 18.98 | .4860 | .4481 | 21.65 | .5985 | .3638 | 20.63 | .5513 | .4014 |
| MPR [56] + NeRF | 15.16 | .3006 | .5595 | 14.38 | .2594 | .6019 | 20.00 | .5381 | .3956 | 18.89 | .4829 | .4484 | 21.72 | .5999 | .3629 | 20.60 | .5513 | .4010 |
| Deblur-NeRF [1] | 15.14 | .2884 | .5330 | 14.41 | .2506 | .5921 | 19.99 | .5199 | .3499 | 18.89 | .4761 | .4151 | 23.12 | .6798 | .2386 | 21.36 | .6003 | .3163 |
| DP-NeRF [2] | 15.06 | .2827 | .5389 | 14.36 | .2506 | .5904 | 19.84 | .5336 | .3075 | 18.77 | .4582 | .4175 | 23.68 | .7036 | .1998 | 21.68 | .6137 | .2992 |
| RegNeRF [6] (No kernel) | 14.60 | .2849 | .5869 | 15.49 | .2997 | .5888 | 18.39 | .4600 | .4704 | 18.44 | .4326 | .4852 | 19.69 | .5249 | .4165 | 19.65 | .4790 | .4583 |
| RegNeRF [6] (w/DP-kernel) | 13.24 | .2162 | .6062 | 12.76 | .1836 | .6447 | 16.44 | .3657 | .4826 | 13.59 | .2221 | .5887 | 21.60 | .6162 | .3046 | 18.25 | .4439 | .4326 |
| Sparse-DeRF (w/DN-kernel) - Ours | 15.52 | .2966 | .5291 | 15.53 | .3112 | .5515 | 20.57 | .5565 | .3354 | 19.98 | .5231 | .3871 | 23.32 | .6903 | .2379 | 22.15 | .6248 | .3030 |
| Sparse-DeRF(w/DP-kernel) - Ours | 15.35 | .2904 | .5242 | 15.57 | .3114 | .5467 | 21.05 | .5776 | .2975 | 20.05 | .5178 | .3736 | 24.27 | .7255 | .2044 | 22.32 | .6283 | .2907 |

V-E1 Quantitative Evaluation
We present the quantitative results of Sparse-DeRF for two different types of blur kernels from Deblur-NeRF [1] and DP-NeRF [2], comparing these results with established baseline methods. The effectiveness of our approach is demonstrated in TABLE I, achieving outstanding performance across entire sparse view settings, regardless of the blur kernel employed. In the Sparse-DeRF results, DN-kernel and DP-kernel denote the blur kernels proposed by the Deblur-NeRF [1] and DP-NeRF [2], respectively. MPRNeRF denotes the naive NeRF model trained solely on color supervision from deblurred images by MPRNet [56], utilizing the reconstruction loss of Eq.5. The results of MPRNeRF reveal interesting observations and marginal improvements in radiance fields when only employing pre-deblurred images as direct color supervision for training. This tendency emphasizes the 3D inconsistency across the pre-deblurred images, as discussed in Section IV-C. In addition, the poor results of the RegNeRF [6] with and without a blur kernel demonstrate that existing regularization faces difficulty in alleviating the complex joint optimization involving both the blur kernel and radiance fields. We further present an analysis of this optimization issue in Section V-F1 with detailed experimental results. In contrast, Sparse-DeRF demonstrates significant enhancements across all evaluation metrics for both types of blur kernels, indicating its superior ability to represent the DeRF with improved visual quality. In particular, our results exhibit more prominent improvements in real-scene scenarios, although there is non-ideal blur degradation, which occurs due to various real environmental factors. For a comprehensive understanding, we provide an extensive ablation study in Section V-F, incorporating results with both types of blur kernels. Additionally, detailed results for all scenes are appended in the appendix, including synthetic and real scenes.
V-E2 Qualitative Evaluation
In Figure 7, we present representative qualitative results on three scenes (Parterre, Coffee, and Decoration) from 2-view, 4-view, and 6-view settings, respectively. The figure depicts the results of novel view synthesis, presenting rendered color and depth images. The figures demonstrate that our model significantly enhances the visual quality of radiance fields in terms of geometric and perceptual fidelity. In addition to the above quantitative results, qualitative results also demonstrate the inconsistency issue of pre-deblurred images and complex joint optimization of the DeRF from sparse view. All the results (ii) of Figure 7 demonstrate that existing representative regularization technique, RegNeRF [6], can not effectively alleviate the optimization issue of the DeRF from sparse view. Furthermore, we encourage readers to view the supplementary videos that emphasize 3D consistency through rendered videos from a spiral camera path.
V-F Ablations
V-F1 Problem Analysis and Motivation
we present the experimental results to describe that it is difficult to jointly optimize the DeRF and naively apply the previous regularization technique of the NeRF to the DeRF from sparse view setting, utilizing the representative existing regularization method, RegNeRF [6]. We attach the experimental results of the RegNeRF [6] from 2-view, 4-view, and 6-view settings with and without the blur kernel to demonstrate the difficulty of the complex joint optimization problem as we mentioned. TABLE II and Figure 8 present quantitative and qualitative results from 2-view, 4-view, and 6-view, respectively. The blur kernel employed is the rigid blur kernel of DP-NeRF [2], which is described as DP-kernel in the table and figures. To help the reader compare the plausible appearance and dense geometry with the proposed Sparse-DeRF, we attach the rendered color and depth images of our model. The results of the figures demonstrate that the integration of the blur kernel involves a straightforward difficulty in optimizing the high-frequency details and the overall scene geometry simultaneously, as indicated by the visual quality of the rendered color and depth images. Although the presence of a blur kernel enables radiance fields to capture high-frequency details, it causes a geometric distortion with the overall wrong density mapping that resembles the fragmented structure of objects or appearance like the painted wall of near- or far-depth regions. These results and analysis demonstrate that naively applying the regularization of the NeRF from sparse view to the DeRF is not effective. In addition, the images (i) and (ii) in Figure 8 demonstrate that although the overall performance is better without the blur kernels, the model still faces difficulty in modeling high-frequency details. This difficulty makes the necessity of the blur kernel optimization still important, leading to a blurry visual quality across the entire scene. Therefore, motivated by the experimental analysis, we propose Sparse-DeRF, the novel regularization method for optimization of the blur kernel and radiance fields simultaneously. The proposed Sparse-DeRF presents high-quality rendered images with dense geometry and detailed high-frequency texture as shown in Figure 8.
| [ 2-view ] | [ 4-view ] | [ 6-view ] | |||||||||||||||||
| [ Synthetic Scene ] | [ Real Scene ] | [ Synthetic Scene ] | [ Real Scene ] | [ Synthetic Scene ] | [ Real Scene ] | ||||||||||||||
| Blur Kernel | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| RegNeRF [6] | 14.60 | .2849 | .5869 | 15.49 | .2997 | .5888 | 18.39 | .4600 | .4704 | 18.44 | .4326 | .4852 | 19.69 | .5249 | .4165 | 19.65 | .4790 | .4583 | |
| RegNeRF [6] | DP-kernel | 13.24 | .2162 | .6062 | 12.76 | .1836 | .6447 | 16.44 | .3657 | .4826 | 13.59 | .2221 | .5887 | 21.60 | .6162 | .3046 | 18.25 | .4439 | .4326 |
| Sparse-DeRF (Ours) | DP-kernel | 15.35 | .2904 | .5242 | 15.57 | .3114 | .5467 | 21.05 | .5776 | .2975 | 20.05 | .5178 | .3736 | 24.27 | .7255 | .2044 | 22.32 | .6283 | .2907 |

| [ 2-view ] | [ 4-view ] | [ 6-view ] | |||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| SS | MGS | PD | DP-kernel | DN-kernel | DP-kernel | DN-kernel | DP-kernel | DN-kernel | |||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| Synthetic Scene | 15.06 | .2827 | .5389 | 15.14 | .2884 | .5330 | 19.84 | .5336 | .3075 | 19.99 | .5199 | .3499 | 23.68 | .7036 | .1998 | 23.12 | .6798 | .2386 | |||
| ✓ | 14.88 | .2772 | .5388 | 15.25 | .2828 | .5418 | 19.93 | .5411 | .3107 | 19.89 | .5201 | .3558 | 24.15 | .7263 | .1974 | 23.59 | .6795 | .2429 | |||
| ✓ | 15.40 | .2857 | .5289 | 15.12 | .3025 | .5243 | 20.16 | .5425 | .3024 | 19.44 | .5295 | .3562 | 23.83 | .7147 | .2072 | 24.33 | .6832 | .2406 | |||
| ✓ | 15.03 | .2796 | .5391 | 14.84 | .2702 | .5454 | 19.65 | .5237 | .3311 | 19.72 | .5104 | .3630 | 23.89 | .7150 | .2052 | 23.35 | .6941 | .2341 | |||
| ✓ | ✓ | 14.52 | .2647 | .5481 | 15.11 | .2889 | .5389 | 20.91 | .5812 | .2948 | 20.03 | .5294 | .3450 | 24.28 | .7279 | .2021 | 23.41 | .6941 | .2324 | ||
| ✓ | ✓ | 15.50 | .2954 | .5215 | 15.57 | .2979 | .5319 | 19.65 | .5164 | .3334 | 19.96 | .5222 | .3547 | 23.53 | .7088 | .2153 | 22.91 | .6654 | .2560 | ||
| ✓ | ✓ | ✓ | 15.35 | .2904 | .5242 | 15.52 | .2966 | .5291 | 21.05 | .5776 | .2975 | 20.57 | .5565 | .3354 | 24.27 | .7255 | .2044 | 23.32 | .6903 | .2379 | |
| Real Scene | 14.36 | .2506 | .5904 | 14.41 | .2506 | .5921 | 18.77 | .4582 | .4175 | 18.89 | .4761 | .4151 | 21.68 | .6137 | .2992 | 21.36 | .6003 | .3163 | |||
| ✓ | 14.26 | .2414 | .5933 | 14.33 | .2495 | .5937 | 19.04 | .4760 | .4008 | 18.96 | .4839 | .4125 | 22.10 | .6214 | .2951 | 21.53 | .6044 | .3178 | |||
| ✓ | 15.46 | .3035 | .5465 | 15.44 | .3037 | .5558 | 19.75 | .4980 | .3737 | 19.06 | .4907 | .4105 | 22.07 | .6212 | .2889 | 21.76 | .6101 | .3097 | |||
| ✓ | 14.28 | .2490 | .5896 | 14.47 | .2549 | .5939 | 19.00 | .4724 | .4080 | 19.84 | .5118 | .3937 | 21.73 | .6082 | .3082 | 21.69 | .6087 | .3142 | |||
| ✓ | ✓ | 14.00 | .2587 | .5830 | 14.47 | .2563 | .5881 | 19.00 | .4760 | .4037 | 18.94 | .4861 | .4145 | 21.84 | .6105 | .3084 | 21.70 | .6129 | .3144 | ||
| ✓ | ✓ | 15.40 | .3009 | .5527 | 15.46 | .3073 | .5519 | 19.74 | .4986 | .3774 | 19.93 | .5188 | .3873 | 22.22 | .6257 | .2868 | 21.88 | .6154 | .3112 | ||
| ✓ | ✓ | ✓ | 15.57 | .3114 | .5467 | 15.53 | .3112 | .5515 | 20.05 | .5178 | .3736 | 19.98 | .5231 | .3871 | 22.32 | .6283 | .2907 | 22.15 | .6248 | .3030 | |
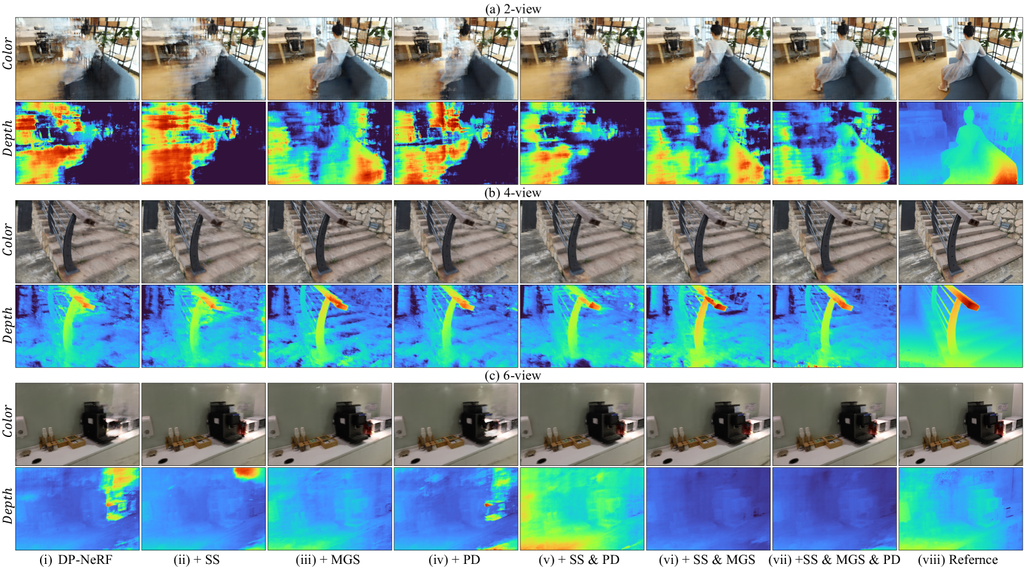
V-F2 Ablation of Each Component
We demonstrate the effectiveness of the Sparse-DeRF’s each component through comprehensive ablation studies, presenting both quantitative and qualitative results. In TABLE III and Figure 9, we present independent quantitative and qualitative results from SS, MGS, and PD, where each component is individually applied to observe the influence of each method. The results include several combinations of the components to reveal the complement effect of each proposed method. The experiments are conducted for entire 2-view, 4-view, and 6-view settings, providing a different performance depending on two types of blur kernels, DN-kernel [1] and DP-kernel [2]. Our model shows superior results in predicting both 3D geometric and appearance details precisely, demonstrating the enhanced evaluation results.
V-F3 Ablation Analysis
Quantitative ablation results demonstrate that our model with full components shows the best results in the real-scene dataset. The results reveal that MGS plays an important role across the entire 2-view, 4-view, and 6-view settings among geometric constraints although each constraint enhances the geometric accuracy. In Figure 9, the importance of MGS is more clearly prominent with qualitative results as color and depth images. If MGS is not applied, we can see that the geometry of the scene is not accurately captured or there are many density artifacts. On the other hand, PD seems to be not effective without geometric constraints in 2-view and 4-view settings as we can figure out in TABLE III and Figure 9. The reason is that the NeRF has more difficulty in predicting the correct geometry with only pre-deblurred images due to the inherent 3D inconsistency, which makes perceptual prior not effective. These difficulties become more severe as the number of views decreases. We can demonstrate that a certain level of accurate geometry should be achieved before applying perceptual distillation.
| [ 2-view ] | [ 4-view ] | [ 6-view ] | |||||||||||||||||
| [ Synthetic Scene ] | [ Real Scene ] | [ Synthetic Scene ] | [ Real Scene ] | [ Synthetic Scene ] | [ Real Scene ] | ||||||||||||||
| Blur Kernel | Gradient Scaling | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() |
| DN-kernel | + Naive [51] | 14.70 | .2483 | .5643 | 14.85 | .2860 | .5653 | 18.69 | .4321 | .4242 | 19.28 | .4909 | .4119 | 22.00 | .6002 | .3117 | 21.20 | .5877 | .3274 |
| DN-kernel | + MGS | 15.12 | .3025 | .5243 | 15.44 | .3037 | .5558 | 19.44 | .5295 | .3562 | 19.84 | .5118 | .3937 | 22.40 | .6832 | .2406 | 21.76 | .6101 | .3097 |
| DP-kernel | + Naive [51] | 14.01 | .2377 | .5743 | 14.95 | .2871 | .5591 | 17.25 | .3933 | .4221 | 18.85 | .4670 | .4014 | 21.55 | .6097 | .2838 | 21.49 | .6010 | .3111 |
| DP-kernel | + MGS | 15.40 | .2857 | .5289 | 15.46 | .3035 | .5465 | 20.16 | .5425 | .3024 | 19.75 | .5980 | .3737 | 23.83 | .7147 | .2072 | 22.07 | .6212 | .2889 |

V-F4 Comparison to Naive Gradient Scaling
We present experimental results of quantitative and qualitative comparison between our proposed MGS and naive gradient scaling of [51] from 2-view, 4-view, and 6-view settings in TABLE IV and Figure 10. We compare the effectiveness of our MGS for two types of kernels we utilize in our paper, which are the kernels of Deblur-NeRF [1] and DP-NeRF [2]. The results describe our MGS outperforms the naive gradient scaling in terms of both quantitative and qualitative performance across the entire experimental setting. Specifically, depth images demonstrate that our MGS more effectively helps the model to predict the accurate geometry than naive gradient scaling. Quantitative results for the entire scene are attached in the appendix.
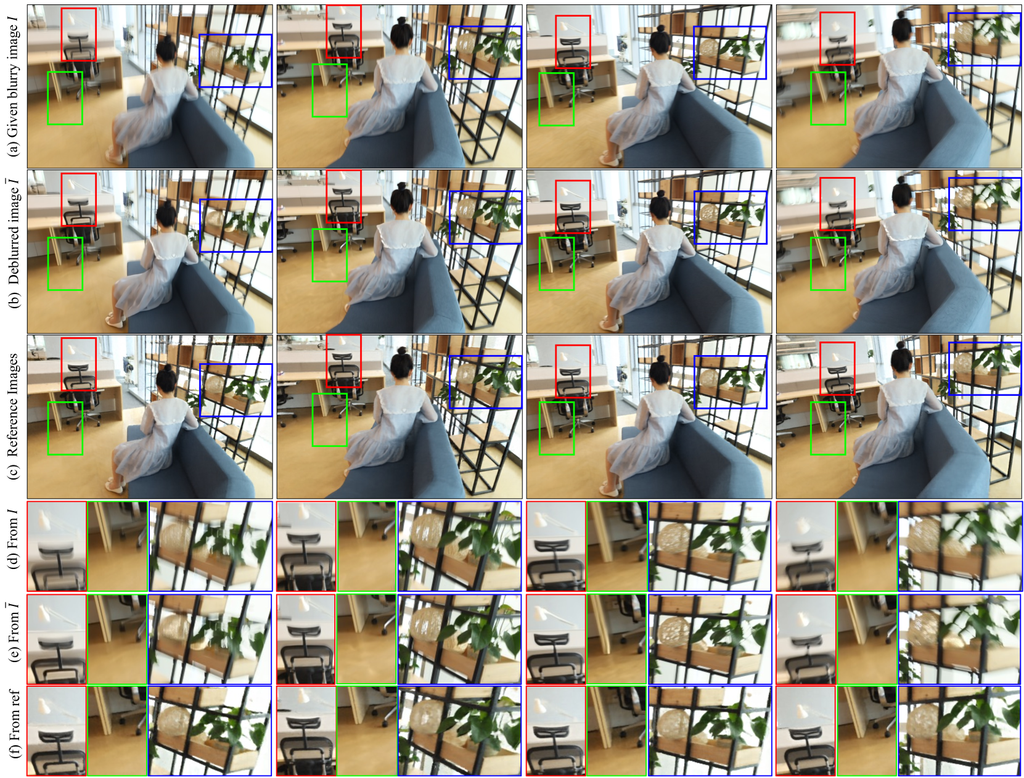
V-F5 Inconsistency of Pre-deblurred Images
As mentioned in Section I and IV-C, image deblurring is conducted independently for each image and presents inconsistent geometry in various regions due to its ill-posed property. In Figure 11, we present the qualitative comparison to reveal the inconsistency of pre-deblurred images across the multi-view training images. Pre-deblurred images are acquired by applying the MPRNet [56]. In addition, we attach the reference images, which are rendered from the DP-NeRF [2] trained with full view, to help readers better understand the inconsistency issue and compare the pre-deblurred geometry to approximated ground truth geometry. Comparing emphasized regions from each image, the pre-deblurred image shows relatively well-restored textures in each image, but the geometry is inconsistently restored and distorted across the multiple views. Such inconsistency adversely affects the learning of radiance fields since it is trained by pixel-wise color reconstruction loss. Furthermore, the performance of image deblurring varies even within a single image depending on the structural complexity of the local region, making it challenging to learn blur kernels. Due to these reasons, directly utilizing pre-filtered images for training radiance fields is difficult. Therefore, perceptual distillation is introduced to transfer only the perceptual texture of pre-deblurred images to the radiance fields.
VI Limitations and Discussions
Despite the remarkable enhancement in terms of 3D geometry and appearance, there are still several limitations. The first one is derived from the blur kernel itself, especially the relationship between the type of the blur kernel and the properties of each scene. For example, the performance is more improved with the rigid blur kernel of DP-NeRF [2] in some scenes, but in other scenes, the improvements are greater with the flexible blur kernel of Deblur-NeRF [1]. These kernel-dependent performances are different across the scenes. As we figure out, a flexible kernel leads to reduced space ambiguity but high scene distortion. In contrast, the rigid kernel leads to accurate geometry but suffers difficulty in optimizing the scene where the distances of the objects from the camera in the scene are diverse and some objects are located very close to the camera due to the inherent rigidity. We tried to take advantage of both kernels and design the hybrid kernel to maximize the effectiveness of the Sparse-DeRF, but it didn’t work as we imagined. Constructing the hybrid blur kernel that has rigid and flexible properties can be a promising future research direction regardless of sparse view setting in the deblurred neural radiance fields (DeRF). The second one is that we have to set the proper hyper-parameter for MGS to find the most effective function shape although MGS greatly improves the 3D geometry in the DeRF from sparse view. However, it is difficult to find an ideal function shape according to the arrangement of the object in the scene, especially as we mentioned above. We handle these cases by setting the magnitude as a high value to only ignore the gradient in a very near distance region, which is attached to the appendix as detailed hyper-parameters per each scene. In this sense, this manual setting of hyperparameters is regarded as one of our limitations. We believe the limitation can be alleviated in future research through various methods such as the introduction of learnable parameters for gradient scaling function. Finally, although sparse view setting of blurry inputs is an extremely practical scenario for blurry inputs, it is too hard to enhance the performance of the DeRF in the 2-view setting due to the lack of the scene information included in the input data. The innate challenge of the 2-view setting is that sparse overlapped 3D space usually leads to inaccurate geometry, which is more likely to be mapped to be painted texture on the wall at the near or far depth regions. There is still room to improve the visual quality of the Sparse-DeRF and solve these problems through state-of-the-art generative methods such as diffusion models, which can be a great future direction for constructing the DeRF from sparse view.
VII Conclusion
In this work, we propose the Sparse-DeRF, a novel regularization method for high-quality deblurred neural radiance fields from sparse view settings, which considers more practical real-world scenarios for radiance fields from only blurry images. We propose two geometric constraints that consist of surface smoothness and modulated gradient scaling, which reflect the real-world statistical geometry and alleviate elongated density artifacts in deblurred neural radiance fields system from sparse view. In addition, we propose a perceptual distillation to utilize the pre-deblurred images as a perceptual prior, which enhances the sharp texture on deblurred neural radiance fields. We demonstrate the effectiveness of the Sparse-DeRF that ameliorates the spatial ambiguity and structural distortion of deblurred neural radiance fields by presenting extensive experimental results in 2-view, 4-view, and 6-view settings. As deblurred neural radiance fields have attracted attention across the research fields related to neural rendering, we believe our work presents a way for future research directions since we address the more practical scenarios for deblurred neural radiance fields from blurry images.
Acknowledgments
This work was supported by the National Research Foundation of Korea (NRF) grant funded by the Korean government (MSIT) (RS-2024-00340745) and an Electronics and Telecommunications Research Institute (ETRI) grant funded by the Korean government [24ZC1200, Research on hyper-realistic interaction technology for five senses and emotional experience]
References
- [1] L. Ma, X. Li, J. Liao, Q. Zhang, X. Wang, J. Wang, and P. V. Sander, “Deblur-nerf: Neural radiance fields from blurry images,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 12 861–12 870.
- [2] D. Lee, M. Lee, C. Shin, and S. Lee, “Dp-nerf: Deblurred neural radiance field with physical scene priors,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 12 386–12 396.
- [3] P. Wang, L. Zhao, R. Ma, and P. Liu, “Bad-nerf: Bundle adjusted deblur neural radiance fields,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 4170–4179.
- [4] J. Yang, M. Pavone, and Y. Wang, “Freenerf: Improving few-shot neural rendering with free frequency regularization,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2023, pp. 8254–8263.
- [5] S. Seo, Y. Chang, and N. Kwak, “Flipnerf: Flipped reflection rays for few-shot novel view synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 22 883–22 893.
- [6] M. Niemeyer, J. T. Barron, B. Mildenhall, M. S. Sajjadi, A. Geiger, and N. Radwan, “Regnerf: Regularizing neural radiance fields for view synthesis from sparse inputs,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 5480–5490.
- [7] J. Huang, A. B. Lee, and D. Mumford, “Statistics of range images,” in Proceedings IEEE Conference on Computer Vision and Pattern Recognition. CVPR 2000 (Cat. No. PR00662), vol. 1. IEEE, 2000, pp. 324–331.
- [8] A. Tewari, O. Fried, J. Thies, V. Sitzmann, S. Lombardi, K. Sunkavalli, R. Martin-Brualla, T. Simon, J. Saragih, M. Nießner et al., “State of the art on neural rendering,” in Computer Graphics Forum, vol. 39, no. 2. Wiley Online Library, 2020, pp. 701–727.
- [9] I. Goodfellow, J. Pouget-Abadie, M. Mirza, B. Xu, D. Warde-Farley, S. Ozair, A. Courville, and Y. Bengio, “Generative adversarial nets,” Advances in neural information processing systems, vol. 27, 2014.
- [10] P. Isola, J.-Y. Zhu, T. Zhou, and A. A. Efros, “Image-to-image translation with conditional adversarial networks,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2017, pp. 1125–1134.
- [11] S. A. Eslami, D. Jimenez Rezende, F. Besse, F. Viola, A. S. Morcos, M. Garnelo, A. Ruderman, A. A. Rusu, I. Danihelka, K. Gregor et al., “Neural scene representation and rendering,” Science, vol. 360, no. 6394, pp. 1204–1210, 2018.
- [12] A. Meka, C. Haene, R. Pandey, M. Zollhöfer, S. Fanello, G. Fyffe, A. Kowdle, X. Yu, J. Busch, J. Dourgarian et al., “Deep reflectance fields: high-quality facial reflectance field inference from color gradient illumination,” ACM Transactions on Graphics (TOG), vol. 38, no. 4, pp. 1–12, 2019.
- [13] T. Sun, J. T. Barron, Y.-T. Tsai, Z. Xu, X. Yu, G. Fyffe, C. Rhemann, J. Busch, P. Debevec, and R. Ramamoorthi, “Single image portrait relighting,” ACM Transactions on Graphics (TOG), vol. 38, no. 4, pp. 1–12, 2019.
- [14] H. Kim, P. Garrido, A. Tewari, W. Xu, J. Thies, M. Niessner, P. Pérez, C. Richardt, M. Zollhöfer, and C. Theobalt, “Deep video portraits,” ACM transactions on graphics (TOG), vol. 37, no. 4, pp. 1–14, 2018.
- [15] L. Liu, W. Xu, M. Zollhoefer, H. Kim, F. Bernard, M. Habermann, W. Wang, and C. Theobalt, “Neural rendering and reenactment of human actor videos,” ACM Transactions on Graphics (TOG), vol. 38, no. 5, pp. 1–14, 2019.
- [16] S. Lombardi, T. Simon, J. Saragih, G. Schwartz, A. Lehrmann, and Y. Sheikh, “Neural volumes: Learning dynamic renderable volumes from images,” arXiv preprint arXiv:1906.07751, 2019.
- [17] V. Sitzmann, M. Zollhöfer, and G. Wetzstein, “Scene representation networks: Continuous 3d-structure-aware neural scene representations,” Advances in Neural Information Processing Systems, vol. 32, 2019.
- [18] Z. Shu, E. Yumer, S. Hadap, K. Sunkavalli, E. Shechtman, and D. Samaras, “Neural face editing with intrinsic image disentangling,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2017, pp. 5541–5550.
- [19] B. Mildenhall, P. P. Srinivasan, M. Tancik, J. T. Barron, R. Ramamoorthi, and R. Ng, “Nerf: Representing scenes as neural radiance fields for view synthesis,” Communications of the ACM, vol. 65, no. 1, pp. 99–106, 2021.
- [20] J. T. Kajiya and B. P. Von Herzen, “Ray tracing volume densities,” ACM SIGGRAPH computer graphics, vol. 18, no. 3, pp. 165–174, 1984.
- [21] L. Liu, J. Gu, K. Zaw Lin, T.-S. Chua, and C. Theobalt, “Neural sparse voxel fields,” Advances in Neural Information Processing Systems, vol. 33, pp. 15 651–15 663, 2020.
- [22] A. Yu, R. Li, M. Tancik, H. Li, R. Ng, and A. Kanazawa, “Plenoctrees for real-time rendering of neural radiance fields,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 5752–5761.
- [23] A. Chen, Z. Xu, A. Geiger, J. Yu, and H. Su, “Tensorf: Tensorial radiance fields,” in European Conference on Computer Vision. Springer, 2022, pp. 333–350.
- [24] T. Müller, A. Evans, C. Schied, and A. Keller, “Instant neural graphics primitives with a multiresolution hash encoding,” ACM Transactions on Graphics (ToG), vol. 41, no. 4, pp. 1–15, 2022.
- [25] S. Fridovich-Keil, A. Yu, M. Tancik, Q. Chen, B. Recht, and A. Kanazawa, “Plenoxels: Radiance fields without neural networks,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 5501–5510.
- [26] B. Attal, J.-B. Huang, M. Zollhöfer, J. Kopf, and C. Kim, “Learning neural light fields with ray-space embedding,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 19 819–19 829.
- [27] B. Kerbl, G. Kopanas, T. Leimkühler, and G. Drettakis, “3d gaussian splatting for real-time radiance field rendering,” ACM Transactions on Graphics (ToG), vol. 42, no. 4, pp. 1–14, 2023.
- [28] Z. Li, S. Niklaus, N. Snavely, and O. Wang, “Neural scene flow fields for space-time view synthesis of dynamic scenes,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 6498–6508.
- [29] K. Park, U. Sinha, J. T. Barron, S. Bouaziz, D. B. Goldman, S. M. Seitz, and R. Martin-Brualla, “Nerfies: Deformable neural radiance fields,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 5865–5874.
- [30] A. Pumarola, E. Corona, G. Pons-Moll, and F. Moreno-Noguer, “D-nerf: Neural radiance fields for dynamic scenes,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 10 318–10 327.
- [31] T. Li, M. Slavcheva, M. Zollhoefer, S. Green, C. Lassner, C. Kim, T. Schmidt, S. Lovegrove, M. Goesele, R. Newcombe et al., “Neural 3d video synthesis from multi-view video,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 5521–5531.
- [32] S. Bi, Z. Xu, P. Srinivasan, B. Mildenhall, K. Sunkavalli, M. Hašan, Y. Hold-Geoffroy, D. Kriegman, and R. Ramamoorthi, “Neural reflectance fields for appearance acquisition,” arXiv preprint arXiv:2008.03824, 2020.
- [33] P. P. Srinivasan, B. Deng, X. Zhang, M. Tancik, B. Mildenhall, and J. T. Barron, “Nerv: Neural reflectance and visibility fields for relighting and view synthesis,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 7495–7504.
- [34] P. Wang, L. Liu, Y. Liu, C. Theobalt, T. Komura, and W. Wang, “Neus: Learning neural implicit surfaces by volume rendering for multi-view reconstruction,” arXiv preprint arXiv:2106.10689, 2021.
- [35] V. Rudnev, M. Elgharib, W. Smith, L. Liu, V. Golyanik, and C. Theobalt, “Nerf for outdoor scene relighting,” in European Conference on Computer Vision. Springer, 2022, pp. 615–631.
- [36] S. Peng, J. Dong, Q. Wang, S. Zhang, Q. Shuai, X. Zhou, and H. Bao, “Animatable neural radiance fields for modeling dynamic human bodies,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 14 314–14 323.
- [37] P. Hedman, P. P. Srinivasan, B. Mildenhall, J. T. Barron, and P. Debevec, “Baking neural radiance fields for real-time view synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 5875–5884.
- [38] T. Neff, P. Stadlbauer, M. Parger, A. Kurz, J. H. Mueller, C. R. A. Chaitanya, A. Kaplanyan, and M. Steinberger, “Donerf: Towards real-time rendering of compact neural radiance fields using depth oracle networks,” in Computer Graphics Forum, vol. 40, no. 4. Wiley Online Library, 2021, pp. 45–59.
- [39] Y.-J. Yuan, Y.-T. Sun, Y.-K. Lai, Y. Ma, R. Jia, and L. Gao, “Nerf-editing: geometry editing of neural radiance fields,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 18 353–18 364.
- [40] M. Kim, S. Seo, and B. Han, “Infonerf: Ray entropy minimization for few-shot neural volume rendering,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 12 912–12 921.
- [41] A. Yu, V. Ye, M. Tancik, and A. Kanazawa, “pixelnerf: Neural radiance fields from one or few images,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 4578–4587.
- [42] A. Jain, M. Tancik, and P. Abbeel, “Putting nerf on a diet: Semantically consistent few-shot view synthesis,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2021, pp. 5885–5894.
- [43] B. Mildenhall, P. Hedman, R. Martin-Brualla, P. P. Srinivasan, and J. T. Barron, “Nerf in the dark: High dynamic range view synthesis from noisy raw images,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 16 190–16 199.
- [44] N. Pearl, T. Treibitz, and S. Korman, “Nan: Noise-aware nerfs for burst-denoising,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2022, pp. 12 672–12 681.
- [45] Q. Wang, Z. Wang, K. Genova, P. P. Srinivasan, H. Zhou, J. T. Barron, R. Martin-Brualla, N. Snavely, and T. Funkhouser, “Ibrnet: Learning multi-view image-based rendering,” in Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2021, pp. 4690–4699.
- [46] D. Lee, J. Oh, J. Rim, S. Cho, and K. M. Lee, “Exblurf: Efficient radiance fields for extreme motion blurred images,” in Proceedings of the IEEE/CVF International Conference on Computer Vision, 2023, pp. 17 639–17 648.
- [47] C. Peng and R. Chellappa, “Pdrf: progressively deblurring radiance field for fast scene reconstruction from blurry images,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 37, no. 2, 2023, pp. 2029–2037.
- [48] N. Max, “Optical models for direct volume rendering,” IEEE Transactions on Visualization and Computer Graphics, vol. 1, no. 2, pp. 99–108, 1995.
- [49] K. M. Lynch and F. C. Park, Modern robotics. Cambridge University Press, 2017.
- [50] O. Rodrigues, “De l’attraction des sphéroïdes,” in Correspondence Sur l’École Impériale Polytechnique, 1816, pp. 361–385.
- [51] J. Philip and V. Deschaintre, “Floaters no more: Radiance field gradient scaling for improved near-camera training,” 2023.
- [52] J. Johnson, A. Alahi, and L. Fei-Fei, “Perceptual losses for real-time style transfer and super-resolution,” in Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, October 11-14, 2016, Proceedings, Part II 14. Springer, 2016, pp. 694–711.
- [53] J. L. Schönberger, E. Zheng, J.-M. Frahm, and M. Pollefeys, “Pixelwise view selection for unstructured multi-view stereo,” in Computer Vision–ECCV 2016: 14th European Conference, Amsterdam, The Netherlands, October 11-14, 2016, Proceedings, Part III 14. Springer, 2016, pp. 501–518.
- [54] J. L. Schonberger and J.-M. Frahm, “Structure-from-motion revisited,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2016, pp. 4104–4113.
- [55] D. P. Kingma and J. Ba, “Adam: A method for stochastic optimization,” arXiv preprint arXiv:1412.6980, 2014.
- [56] S. W. Zamir, A. Arora, S. Khan, M. Hayat, F. S. Khan, M.-H. Yang, and L. Shao, “Multi-stage progressive image restoration,” in Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, 2021, pp. 14 821–14 831.
- [57] K. Simonyan and A. Zisserman, “Very deep convolutional networks for large-scale image recognition,” arXiv preprint arXiv:1409.1556, 2014.
- [58] R. Zhang, P. Isola, A. A. Efros, E. Shechtman, and O. Wang, “The unreasonable effectiveness of deep features as a perceptual metric,” in Proceedings of the IEEE conference on computer vision and pattern recognition, 2018, pp. 586–595.
![[Uncaptioned image]](dogyoon_lee.jpg) |
Dogyoon Lee is a Ph.D candidate at the School of Electrical and Electronic Engineering, Yonsei University. He received his B.S. degree in Electrical and Electronic Engineering from Yonsei University, Seoul, South Korea, in 2019. His current research interests focus on 3D computer vision including Neural rendering and its applications in real-world scenarios, 3D from Images, 3D generative models, 3D reconstruction, and Image processing. |
![[Uncaptioned image]](donghyung_kim.jpeg) |
Donghyeong Kim is a Ph.D candidate at the School of Electrical and Electronic Engineering, Yonsei University. He received his B.S. degree in Electrical and Electronic Engineering from Yonsei University, Seoul, South Korea, in 2021. degree. His current research interests include anomaly detection, 3D computer vision, generative models, 3D reconstruction, and Image processing. |
![[Uncaptioned image]](jungho_lee.jpeg) |
Jungho Lee is a Ph.D candidate at the School of Electrical and Electronic Engineering, Yonsei University. He received his B.S. degree in Electrical and Electronic Engineering from Yonsei University, Seoul, Korea, in 2021. His current research interests focus on neural rendering and human motion analysis in real-world conditions, with various mathematical machine learning tools such as neural ordinary differential equations. |
![[Uncaptioned image]](minhyeok_lee.jpeg) |
Minhyeok Lee is a dedicated Computer Vision and ML/DL Researcher with a focus on segmentation, autonomous driving, detection & recognition, and novel view synthesis. Currently pursuing an Integrated M.S./Ph.D. in Electrical and Electronic Engineering at Yonsei University. His research spans various areas such as salient object detection, video object segmentation, camouflaged object detection, lane detection, and monocular depth estimation. |
![[Uncaptioned image]](Seunghoon_lee.jpeg) |
Seunghoon Lee received the B.S degree in Electronic Engineering of Inha University, Incheon, Korea in 2020. He is currently an integrated MS/Ph.D degree student in Electrical and Electronic Engineering, at Yonsei University. His research interests are video object segmentation, salient object detection, and super-resolution. |
![[Uncaptioned image]](sangyoun_lee.jpeg) |
Sangyoun Lee received his Ph.D. degree in Electrical and Computer Engineering from the Georgia Institute of Technology, Atlanta, Georgia, USA, in 1999. He is currently a professor at the School of Electrical and Electronic Engineering. His research interests include all aspects of computer vision, with a special focus on video codecs. |
Appendix A Sample Space Visualization
In Figure 12, we present the visualization of the sample space of the unseen rays from the RegNeRF [6] and our fixed unseen rays, which is used for fair comparison in the paper. Since they randomly sample the camera poses from the sample space in every training, we sample the unseen camera poses from the sample space to show the approximate coverage of the sample space. As we can see in the Figure 12, the fixed unseen rays, which are used in our experiments still in the coverage of the sample space of the RegNeRF. In addition, training camera poses and fixed unseen training rays do not significantly overlap with test rays, which also does not break the training and testing rule for novel view synthesis. Hence, it is not a problem to use the fixed unseen rays as alternative unseen rays of the RegNeRF. As we mentioned in Section V-C in the main paper, we utilize the fixed unseen rays for training our model to fairly evaluate the performances across the extensive experiments since the randomness of unseen ray generation in the RegNeRF makes it hard to understand the effectiveness of each component.
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | Girl | Heron | Parterre | Puppet | Stair |
| -view | 1, 12 | 12, 33 | 11, 39 | 3, 10 | 1, 19 | 9, 16 | 11, 35 | 8, 26 | 9, 31 | 13, 26 |
| -view | 1, 12, 18, 22 | 1, 12, 22, 33 | 5, 11, 20, 39 | 3, 10, 15, 26 | 1, 19, 22, 39 | 2, 9, 16, 32 | 4, 11, 18, 35 | 1, 8, 13, 26 | 9, 13, 21, 31 | 4, 13, 16, 26 |
| -view | 1, 5, 10, 12, 18, 22 | 1, 8, 12, 17, 22, 33 | 5, 11, 17, 20, 34, 39 | 3, 10, 11, 15, 21, 26 | 1, 14, 19, 22, 27, 39 | 2, 9, 16, 24, 32, 37 | 4, 11, 18, 23, 27, 35 | 1, 8, 13, 17, 26, 28 | 7, 9, 13, 21, 23, 31 | 2, 4, 13, 16, 26, 34 |
| Synthetic Scene | Cozyroom | Factory | Pool | Tanabata | Trolley | |||||
| -view | 2, 17 | 3, 19 | 10, 23 | 1, 7 | 13, 23 | |||||
| -view | 2, 17, 23, 29 | 3, 14, 19, 33 | 5, 10, 15, 23 | 1, 7, 11, 22 | 7, 13, 23, 31 | |||||
| -view | 2, 14, 17, 21, 23, 29 | 1, 3, 14, 19, 28, 33 | 1, 5, 10, 15, 20, 23 | 1, 7, 11, 18, 22, 27 | 7, 13, 20, 23, 27, 31 |
| Synthetic Scene | Cozyroom | Factory | Pool | Tanabata | Trolley | |||||
| 10.0 | 10.0 | 10.0 | 1.0 | 10.0 | ||||||
| 1.75 | 1.75 | 1.75 | 1.5 | 1.75 | ||||||
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | Girl | Heron | Parterre | Puppet | Stair |
| 1.0 | 1.0 | 10.0 | 1.0 | 1.0 | 1.0 | 1.0 | 1.0 | 10.0 | 1.0 | |
| 1.2 | 0.67 | 1.75 | 0.67 | 0.5 | 0.5 | 0.5 | 0.5 | 1.75 | 0.5 |
Appendix B Additional Implementation Details
B-A Training Scene Indices
For fair comparison in future research, we present the image indices of each scene for training the Sparse-DeRF in TABLE V. The indices are manually selected from the training images of each scene as we mentioned in the main paper. Note that, the indices of the 2-view and 4-view settings are subsets of the 6-view setting.
B-B Parameters for Entire Scenes
In TABLE VI, we present the hyper-parameters of MGS for entire scenes, which consist of period and magnitude of the sine function. As we indicate in Section IV-B in the main paper, we set the magnitude as high value to only ignore the gradient in very near distance regions for scenes such as Buick, Puppet, Cozyroom, Factory, Pool, and Trolley. Please refer to the figure of the function shape depending on the parameters in the main paper.
Appendix C Additional Quantitative Results
C-A Quantitative Results for Entire Scenes
We present the comprehensive experimental results for entire scenes from 2-view, 4-view, and 6-view settings in TABLE VII, VIII, and IX, respectively. The results of the Sparse-DeRF in the TABLE VII, VIII, and IX are representative results as we presented in Section V-E1 in the main paper. In addition, we present more detailed ablation results for entire scenes from 2-view, 4-view, and 6-view settings in TABLE X, XI, and XII, respectively. As we mentioned before, we also present the separated ablation results according to the type of the kernel from DP-NeRF [2] and Deblur-NeRF [1].
C-B Complex Optimization Problem for Entire Scenes
We present the comprehensive experimental results of the complex optimization problem for entire scenes from 2-view, 4-view, and 6-view settings in TABLE XIV, XV, and XVI, respectively. In addition, we also present the quantitative results of the experiments on the Decoration scene that varies the number of sparse views in TABLE XIII as we mentioned in the main paper.
C-C Comparison to Naive Gradient Scaling for Entire Scenes
We present the quantitative comparison results for entire scenes that compare our modulated gradient scaling (MGS) and naive gradient scaling of [51] from 2-view, 4-view, and 6-view settings in TABLEXVII, XVIII, and XIX, respectively.
| Synthetic Scene | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| Naive NeRF [19] | 14.24 | .2186 | .6867 | 21.07 | .6127 | .3644 | 18.59 | .3575 | .4288 | 10.84 | .1517 | .6500 | 10.82 | .1591 | .6593 | 15.11 | .2999 | .5578 |
| MPR [56]+NeRF | 14.43 | .2250 | .6858 | 21.08 | .6111 | .3671 | 18.72 | .3676 | .4228 | 11.03 | .1456 | .6553 | 10.56 | .1535 | .6663 | 15.16 | .3006 | .5595 |
| Deblur-NeRF [1] | 14.14 | .2009 | .6647 | 20.58 | .5768 | .3443 | 18.37 | .3247 | .4061 | 11.56 | .1704 | .6075 | 11.05 | .1690 | .6425 | 15.14 | .2884 | .5330 |
| DP-NeRF [2] | 14.14 | .2091 | .6540 | 20.71 | .5752 | .3487 | 18.38 | .3276 | .4127 | 11.21 | .1482 | .6247 | 10.88 | .1536 | .6543 | 15.06 | .2827 | .5389 |
| RegNeRF [6] (No kernel) | 14.57 | .2523 | .6680 | 17.13 | .4616 | .3808 | 14.23 | .1473 | .7298 | 13.01 | .2408 | .5956 | 14.04 | .3227 | .5602 | 14.60 | .2849 | .5869 |
| RegNeRF [6] (w/DP-kernel) | 14.20 | .2214 | .6412 | 18.88 | .5136 | .3476 | 13.03 | .1003 | .6845 | 9.21 | .0815 | .6920 | 10.86 | .1644 | .6657 | 13.24 | .2162 | .6062 |
| Sparse-DeRF (w/DN-kernel) - Ours | 14.27 | .2200 | .6564 | 20.57 | .5675 | .3589 | 19.81 | .3330 | .4058 | 11.67 | .1827 | .5947 | 11.28 | .1800 | .6298 | 15.52 | .2966 | .5291 |
| Sparse-DeRF (w/DP-kernel) - Ours | 14.10 | .2116 | .6413 | 18.97 | .5206 | .3417 | 20.32 | .3488 | .4056 | 12.00 | .1943 | .5902 | 11.36 | .1769 | .6422 | 15.35 | .2904 | .5242 |
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| Naive NeRF [19] | 18.45 | .4363 | .5693 | 13.32 | .2595 | .6131 | 13.49 | .2620 | .5680 | 17.76 | .5249 | .4807 | 12.25 | .1718 | .6738 | |||
| MPR [56]+NeRF | 18.69 | .4413 | .5659 | 13.09 | .2505 | .6194 | 13.31 | .2574 | .5706 | 18.13 | .5243 | .4869 | 12.41 | .1761 | .6735 | |||
| Deblur-NeRF [1] | 18.80 | .4325 | .5521 | 12.86 | .2414 | .5947 | 13.11 | .2446 | .5609 | 18.66 | .5272 | .4696 | 12.09 | .1508 | .6722 | |||
| DP-NeRF [2] | 18.22 | .4200 | .5611 | 13.24 | .2263 | .6062 | 13.43 | .2480 | .5571 | 18.15 | .5191 | .4876 | 12.34 | .1672 | .6675 | |||
| RegNeRF [6] (No kernel) | 20.48 | .4951 | .5398 | 15.53 | .3388 | .5403 | 17.05 | .4241 | .4361 | 23.24 | .6950 | .3505 | 10.94 | .0816 | .7545 | |||
| RegNeRF [6] (w/DP-kernel) | 18.58 | .4297 | .5565 | 13.49 | .2429 | .5985 | 12.51 | .2199 | .5579 | 15.71 | .4280 | .5370 | 11.15 | .0927 | .7520 | |||
| Sparse-DeRF (w/DN-kernel) - Ours | 20.07 | .4612 | .5290 | 13.62 | .2678 | .5835 | 14.38 | .3182 | .4913 | 19.51 | .6048 | .4146 | 13.09 | .2173 | .6256 | |||
| Sparse-DeRF (w/DP-kernel) - Ours | 20.09 | .4583 | .5244 | 14.05 | .2890 | .5555 | 13.78 | .2864 | .5036 | 19.67 | .6084 | .4096 | 13.11 | .2192 | .6192 | |||
| Real Scene | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| Naive NeRF [19] | 11.06 | .2298 | .6304 | 13.69 | .1564 | .5683 | 15.20 | .2528 | .6462 | 14.34 | .2937 | .6156 | 14.27 | .0474 | .6385 | 14.38 | .2635 | .6004 |
| MPR [56]+NeRF | 10.80 | .1977 | .6424 | 13.51 | .1538 | .5652 | 15.45 | .2667 | .6422 | 14.22 | .2844 | .6135 | 14.15 | .0414 | .6392 | 14.38 | .2594 | .6019 |
| Deblur-NeRF [1] | 10.94 | .2031 | .6436 | 13.97 | .1459 | .5499 | 15.02 | .2320 | .6431 | 14.28 | .2764 | .6036 | 14.40 | .0525 | .6313 | 14.41 | .2506 | .5921 |
| DP-NeRF [2] | 11.14 | .2151 | .6485 | 13.63 | .1473 | .5376 | 14.70 | .2226 | .6348 | 14.32 | .2887 | .5930 | 14.38 | .0521 | .6104 | 14.36 | .2506 | .5904 |
| RegNeRF [6] (No kernel) | 8.31 | .0602 | .7545 | 11.43 | .0951 | .6687 | 15.58 | .2709 | .6510 | 16.02 | .3548 | .5739 | 16.30 | .1816 | .6182 | 15.49 | .2997 | .5888 |
| RegNeRF [6] (w/DP-kernel) | 7.86 | .0419 | .7737 | 11.57 | .0783 | .6246 | 12.54 | .1524 | .7091 | 10.67 | .1331 | .6604 | 13.49 | .0170 | .6770 | 12.76 | .1836 | .6447 |
| Sparse-DeRF (w/DN-kernel) - Ours | 12.85 | .3418 | .5585 | 14.30 | .1706 | .5197 | 16.61 | .2903 | .5912 | 14.91 | .3141 | .5886 | 15.97 | .1255 | .6125 | 15.53 | .3112 | .5515 |
| Sparse-DeRF (w/DP-kernel) - Ours | 13.11 | .3707 | .5486 | 14.17 | .1669 | .5285 | 16.19 | .2527 | .5908 | 15.25 | .3277 | .5739 | 16.30 | .1343 | .6133 | 15.57 | .3114 | .5467 |
| Synthetic Scene | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| Naive NeRF [19] | 16.63 | .3494 | .5861 | 22.75 | .6935 | .2903 | 25.92 | .6419 | .2495 | 16.15 | .4408 | .4635 | 18.66 | .5380 | .4104 | 20.02 | .5327 | .4000 |
| MPR [56]+NeRF | 16.97 | .3570 | .5789 | 22.86 | .7014 | .2895 | 25.77 | .6436 | .2465 | 16.78 | .4827 | .4361 | 17.61 | .5056 | .4272 | 20.00 | .5381 | .3956 |
| Deblur-NeRF [1] | 17.26 | .3740 | .5088 | 25.51 | .7767 | .1897 | 23.38 | .5068 | .2649 | 15.91 | .4209 | .4198 | 17.91 | .5213 | .3661 | 19.99 | .5199 | .3499 |
| DP-NeRF [2] | 19.20 | .5175 | .3813 | 21.50 | .6242 | .1980 | 21.85 | .4235 | .3117 | 17.30 | .5265 | .3381 | 19.35 | .5765 | .3084 | 19.84 | .5336 | .3075 |
| RegNeRF [6] (No kernel) | 16.32 | .3441 | .5876 | 23.25 | .7155 | .2663 | 16.21 | .2040 | .6451 | 17.35 | .4915 | .4509 | 18.81 | .5447 | .4020 | 18.39 | .4600 | .4704 |
| RegNeRF [6] (w/DP-kernel) | 16.71 | .3497 | .4683 | 21.37 | .6471 | .1802 | 15.17 | .1740 | .6666 | 10.27 | .1165 | .6911 | 18.66 | .5412 | .4067 | 16.44 | .3657 | .4826 |
| Sparse-DeRF (w/DN-kernel) - Ours | 16.91 | .3693 | .5357 | 25.79 | .7872 | .1801 | 25.48 | .6042 | .2405 | 16.58 | .4705 | .3793 | 18.10 | .5514 | .3414 | 20.57 | .5565 | .3354 |
| Sparse-DeRF (w/DP-kernel) - Ours | 18.99 | .4770 | .4034 | 26.51 | .8051 | .1627 | 23.33 | .4888 | .2733 | 17.51 | .5371 | .3356 | 18.92 | .5799 | .3126 | 21.05 | .5776 | .2975 |
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| Naive NeRF [19] | 21.61 | .5043 | .4992 | 17.23 | fv.4384 | .4746 | 19.20 | .5508 | .3579 | 23.21 | .7341 | .3281 | 14.78 | .3299 | .5640 | |||
| MPR [56]+NeRF | 21.46 | .5046 | .4992 | 16.98 | .4260 | .4766 | 19.39 | .5486 | .3629 | 22.98 | .7267 | .3284 | 14.88 | .3460 | .5532 | |||
| Deblur-NeRF [1] | 21.90 | .5182 | .4609 | 17.15 | .4331 | .4316 | 19.34 | .5278 | .3407 | 23.10 | .7302 | .2873 | 14.94 | .3201 | .5471 | |||
| DP-NeRF [2] | 23.20 | .5842 | .3847 | 17.42 | .4046 | .4658 | 19.26 | .5323 | .3374 | 24.05 | .7597 | .2624 | 14.98 | .3018 | .5618 | |||
| RegNeRF [6] (No kernel) | 21.16 | .5100 | .4952 | 18.12 | .4711 | .4569 | 20.11 | .5821 | .3412 | 26.14 | .7837 | .2965 | 11.35 | .1045 | .7030 | |||
| RegNeRF [6] (w/DP-kernel) | 19.13 | .4391 | .4042 | 17.42 | .4165 | .3746 | 13.31 | .2697 | .4715 | 16.40 | .4684 | .5239 | 11.07 | .1058 | .7089 | |||
| Sparse-DeRF (w/DN-kernel) - Ours | 22.28 | .5506 | .4334 | 18.69 | .5058 | .3774 | 19.28 | .5414 | .3371 | 26.76 | .8126 | .2419 | 17.12 | .4192 | .4761 | |||
| Sparse-DeRF (w/DP-kernel) - Ours | 23.39 | .6010 | .3806 | 20.41 | .5451 | .3305 | 19.48 | .5531 | .3251 | 27.77 | .8364 | .2049 | 16.33 | .3914 | .4950 | |||
| Real Scene | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| Naive NeRF [19] | 15.91 | .5659 | .4161 | 18.83 | .4263 | .4086 | 20.64 | .4857 | .4822 | 18.15 | .4619 | .4470 | 20.27 | .3622 | .5033 | 18.98 | .4860 | .4481 |
| MPR [56]+NeRF | 15.60 | .5617 | .4224 | 18.91 | .4217 | .4173 | 20.76 | .4893 | .4781 | 17.96 | .4548 | .4468 | 19.94 | .3493 | .4993 | 18.89 | .4829 | .4484 |
| Deblur-NeRF [1] | 15.62 | .5351 | .4206 | 18.85 | .4350 | .3398 | 19.71 | .4318 | .4549 | 17.77 | .4400 | .4358 | 20.49 | .3901 | .4326 | 18.89 | .4761 | .4151 |
| DP-NeRF [2] | 15.40 | .5237 | .4318 | 18.68 | .4292 | .3352 | 17.62 | .2987 | .4991 | 17.61 | .4369 | .4313 | 19.44 | .3107 | .4657 | 18.77 | .4582 | .4175 |
| RegNeRF [6] (No kernel) | 10.24 | .1511 | .7199 | 18.86 | .4235 | .4194 | 18.68 | .4238 | .5163 | 18.66 | .4788 | .4327 | 21.06 | .3975 | .4706 | 18.44 | .4326 | .4852 |
| RegNeRF [6] (w/DP-kernel) | 9.52 | .1304 | .7119 | 11.56 | .0595 | .6149 | 13.61 | .1721 | .7245 | 11.10 | .1342 | .6914 | 12.73 | .0249 | .6610 | 13.59 | .2221 | .5887 |
| Sparse-DeRF (w/DN-kernel) - Ours | 16.95 | .5975 | .3823 | 19.04 | .4558 | .3315 | 20.74 | .4916 | .4323 | 18.11 | .4616 | .4202 | 20.80 | .3948 | .4386 | 19.98 | .5231 | .3871 |
| Sparse-DeRF (w/DP-kernel) - Ours | 16.47 | .5855 | .3835 | 19.09 | .4624 | .3194 | 18.36 | .3375 | .4715 | 17.97 | .4612 | .4206 | 21.25 | .4045 | .4044 | 20.05 | .5178 | .3736 |
| Synthetic Scene | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| Naive NeRF [19] | 17.12 | .3663 | .5663 | 23.12 | .7160 | .2713 | 28.42 | .7463 | .2106 | 19.92 | .5889 | .3866 | 19.68 | .5749 | .3853 | 21.65 | .5985 | .3638 |
| MPR [56]+NeRF | 17.21 | .3754 | .5649 | 23.06 | .7087 | .2749 | 28.38 | .7461 | .2093 | 20.23 | .5966 | .3783 | 19.71 | .5728 | .3870 | 21.72 | .5999 | .3629 |
| Deblur-NeRF [1] | 18.77 | .5048 | .3890 | 26.67 | .8214 | .1475 | 27.50 | .7116 | .1783 | 21.10 | .6693 | .2517 | 21.58 | .6921 | .2263 | 23.12 | .6798 | .2386 |
| DP-NeRF [2] | 21.63 | .6402 | .2984 | 27.63 | .8475 | .1224 | 25.36 | .6227 | .1861 | 21.27 | .6818 | .2023 | 22.49 | .7259 | .1899 | 23.68 | .7036 | .1998 |
| RegNeRF [6] (No kernel) | 17.04 | .3690 | .5729 | 23.40 | .7205 | .2649 | 18.05 | .3610 | .4870 | 20.33 | .5980 | .3745 | 19.63 | .5760 | .3833 | 19.69 | .5249 | .4165 |
| RegNeRF [6] (w/DP-kernel) | 21.03 | .6273 | .3076 | 27.73 | .8455 | .1238 | 18.04 | .3173 | .4987 | 21.84 | .7246 | .2022 | 19.36 | .5661 | .3908 | 21.60 | .6162 | .3046 |
| Sparse-DeRF (w/DN-kernel) - Ours | 18.33 | .5144 | .4004 | 26.63 | .8184 | .1513 | 28.16 | .7344 | .1755 | 22.06 | .6988 | .2245 | 21.43 | .6855 | .2380 | 23.32 | .6903 | .2379 |
| Sparse-DeRF (w/DP-kernel) - Ours | 21.29 | .6179 | .3261 | 27.34 | .8340 | .1298 | 28.19 | .7365 | .1606 | 22.30 | .7233 | .2017 | 22.21 | .7159 | .2036 | 24.27 | .7255 | .2044 |
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| Naive NeRF [19] | 22.12 | .5359 | .4818 | 21.39 | .6253 | .3328 | 21.21 | .6197 | .3100 | 22.73 | .7163 | .3397 | 19.14 | .5118 | .4460 | |||
| MPR [56]+NeRF | 22.15 | .5365 | .4745 | 21.39 | .6261 | .3294 | 21.11 | .6192 | .3063 | 22.56 | .7087 | .3435 | 18.31 | .4837 | .4735 | |||
| Deblur-NeRF [1] | 24.47 | .6473 | .3342 | 23.63 | .7204 | .2108 | 21.45 | .6285 | .2625 | 23.70 | .7604 | .2588 | 17.74 | .4790 | .4296 | |||
| DP-NeRF [2] | 24.73 | .6651 | .3107 | 23.24 | .6643 | .2494 | 21.65 | .6418 | .2445 | 25.51 | .7949 | .2170 | 17.48 | .4725 | .4457 | |||
| RegNeRF [6] (No kernel) | 21.98 | .5312 | .4677 | 21.67 | .6129 | .3406 | 21.16 | .6215 | .3051 | 25.67 | .7716 | .3105 | 12.45 | .1569 | .7061 | |||
| RegNeRF [6] (w/DP-kernel) | 25.02 | .6719 | .2953 | 22.95 | .6554 | .2501 | 21.57 | .6456 | .2462 | 23.38 | .7393 | .2341 | 11.43 | .1247 | .6932 | |||
| Sparse-DeRF (w/DN-kernel) - Ours | 23.76 | .6184 | .3607 | 23.39 | .7155 | .2329 | 21.66 | .6405 | .2585 | 27.84 | .8388 | .2068 | 19.98 | .5553 | .3644 | |||
| Sparse-DeRF (w/DP-kernel) - Ours | 24.80 | .6643 | .3200 | 23.32 | .6789 | .2455 | 21.27 | .6234 | .2662 | 28.91 | .8525 | .1902 | 19.69 | .5440 | .3672 | |||
| Real Scene | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| Naive NeRF [19] | 18.43 | .6500 | .3335 | 18.91 | .4204 | .4307 | 21.82 | .5487 | .4351 | 19.52 | .5242 | .3933 | 21.01 | .3602 | .5111 | 20.63 | .5513 | .4014 |
| MPR [56]+NeRF | 18.61 | .6580 | .3324 | 18.97 | .4220 | .4287 | 21.78 | .5477 | .4358 | 19.84 | .5357 | .3793 | 21.27 | .3758 | .4070 | 20.60 | .5513 | .4010 |
| Deblur-NeRF [1] | 18.09 | .6582 | .3055 | 19.40 | .4709 | .3166 | 21.92 | .5557 | .3872 | 20.58 | .5834 | .3226 | 22.60 | .4993 | .3349 | 21.36 | .6003 | .3163 |
| DP-NeRF [2] | 18.16 | .6622 | .3020 | 19.58 | .4991 | .2905 | 22.36 | .5879 | .3350 | 20.65 | .5868 | .2988 | 23.40 | .5624 | .2986 | 21.68 | .6137 | .2992 |
| RegNeRF [6] (No kernel) | 11.06 | .1966 | .7091 | 18.96 | .4218 | .4292 | 21.83 | .5526 | .4353 | 20.07 | .5309 | .3827 | 21.69 | .3938 | .4963 | 19.65 | .4790 | .4583 |
| RegNeRF [6] (w/DP-kernel) | 10.38 | .1434 | .7200 | 12.83 | .1019 | .5757 | 21.34 | .5159 | .3415 | 20.49 | .5799 | .3113 | 13.08 | .2613 | .6581 | 18.25 | .4439 | .4326 |
| Sparse-DeRF (w/DN-kernel) - Ours | 18.86 | .6860 | .2769 | 19.63 | .5011 | .2992 | 22.15 | .5703 | .3787 | 20.81 | .5882 | .3149 | 23.42 | .5340 | .3374 | 22.15 | .6248 | .3030 |
| Sparse-DeRF (w/DP-kernel) - Ours | 18.96 | .6887 | .2744 | 19.59 | .5051 | .2808 | 22.57 | .5994 | .3317 | 20.60 | .5756 | .3124 | 23.48 | .5509 | .3189 | 22.32 | .6283 | .2907 |
| Kernel Type | Synthetic Scene | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DP-kernel | 14.14 | .2091 | .6540 | 20.71 | .5752 | .3487 | 18.38 | .3276 | .4127 | 11.21 | .1482 | .6247 | 10.88 | .1536 | .6543 | 15.06 | .2827 | .5389 | |||
| ✓ | 14.09 | .2008 | .6550 | 19.57 | .5321 | .3544 | 18.49 | .3178 | .4271 | 11.21 | .1552 | .6243 | 11.04 | .1801 | .6331 | 14.88 | .2772 | .5388 | |||
| ✓ | 14.33 | .2088 | .6496 | 18.89 | .5032 | .3577 | 20.30 | .3467 | .4017 | 11.69 | .1748 | .6067 | 11.78 | .1948 | .6289 | 15.40 | .2857 | .5289 | |||
| ✓ | 14.19 | .2035 | .6620 | 19.82 | .5404 | .3451 | 18.96 | .3350 | .4125 | 11.16 | .1457 | .6408 | 11.02 | .1733 | .6350 | 15.03 | .2796 | .5391 | |||
| ✓ | ✓ | 13.95 | .1963 | .6629 | 18.81 | .5010 | .3637 | 18.57 | .3404 | .4148 | 11.00 | .1501 | .6259 | 10.25 | .1357 | .6730 | 14.52 | .2647 | .5481 | ||
| ✓ | ✓ | 14.24 | .2228 | .6439 | 20.16 | .5560 | .3391 | 20.37 | .3526 | .4004 | 11.55 | .1710 | .5999 | 11.16 | .1744 | .6241 | 15.50 | .2954 | .5215 | ||
| ✓ | ✓ | ✓ | 14.10 | .2116 | .6413 | 18.97 | .5206 | .3417 | 20.32 | .3488 | .4056 | 12.00 | .1943 | .5902 | 11.36 | .1769 | .6422 | 15.35 | .2904 | .5242 | |
| DN-kernel | 14.14 | .2009 | .6647 | 20.58 | .5768 | .3443 | 18.37 | .3247 | .4061 | 11.56 | .1704 | .6075 | 11.05 | .1690 | .6425 | 15.14 | .2884 | .5330 | |||
| ✓ | 14.21 | .2177 | .6650 | 20.33 | .5663 | .3591 | 18.74 | .3200 | .4093 | 11.13 | .1547 | .6191 | 10.78 | .1554 | .6566 | 15.04 | .2828 | .5418 | |||
| ✓ | 14.20 | .2107 | .6686 | 21.02 | .5999 | .3326 | 19.64 | .3330 | .3950 | 11.55 | .1804 | .5903 | 11.48 | .1883 | .6351 | 15.12 | .3025 | .5243 | |||
| ✓ | 14.11 | .2096 | .6588 | 18.78 | .5094 | .3928 | 19.76 | .3464 | .3901 | 10.58 | .1206 | .6565 | 10.99 | .1648 | .6289 | 14.84 | .2702 | .5454 | |||
| ✓ | ✓ | 14.24 | .2222 | .6619 | 21.02 | .5918 | .3544 | 18.77 | .3197 | .4115 | 11.12 | .1642 | .6217 | 10.41 | .1467 | .6452 | 15.11 | .2889 | .5389 | ||
| ✓ | ✓ | 14.14 | .2189 | .6622 | 20.10 | .5555 | .3761 | 20.11 | .3372 | .3939 | 11.49 | .1753 | .5975 | 11.99 | .2026 | .6299 | 15.57 | .2979 | .5319 | ||
| ✓ | ✓ | ✓ | 14.27 | .2200 | .6564 | 20.57 | .5675 | .3589 | 19.81 | .3330 | .4058 | 11.67 | .1827 | .5947 | 11.28 | .1800 | .6298 | 15.52 | .2966 | .5291 | |
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | ||||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| DP-kernel | 18.22 | .4200 | .5611 | 13.24 | .2263 | .6062 | 13.43 | .2480 | .5571 | 18.15 | .5191 | .4876 | 12.34 | .1672 | .6675 | ||||||
| ✓ | 18.76 | .4329 | .5521 | 12.68 | .2189 | .6301 | 13.05 | .2269 | .5657 | 17.51 | .4792 | .4907 | 12.28 | .1638 | .6619 | ||||||
| ✓ | 19.80 | .4544 | .5273 | 14.08 | .2706 | .5509 | 13.96 | .3028 | .4992 | 19.72 | .6115 | .4035 | 13.14 | .2198 | .6201 | ||||||
| ✓ | 18.28 | .4191 | .5591 | 12.95 | .2281 | .5951 | 13.49 | .2654 | .5464 | 17.92 | .5030 | .4875 | 12.04 | .1491 | .6700 | ||||||
| ✓ | ✓ | 18.50 | .4341 | .5537 | 12.92 | .2407 | .5938 | 13.64 | .2564 | .5427 | 18.09 | .5263 | .4689 | 12.42 | .1669 | .6689 | |||||
| ✓ | ✓ | 19.80 | .4412 | .5346 | 14.28 | .2913 | .5520 | 13.82 | .2920 | .5013 | 18.81 | .5712 | .4363 | 13.04 | .2166 | .6203 | |||||
| ✓ | ✓ | ✓ | 20.09 | .4583 | .5244 | 14.05 | .2890 | .5555 | 13.78 | .2864 | .5036 | 19.67 | .6084 | .4096 | 13.11 | .2192 | .6192 | ||||
| DN-kernel | 18.80 | .4325 | .5521 | 12.86 | .2414 | .5947 | 13.11 | .2446 | .5609 | 18.66 | .5272 | .4696 | 12.09 | .1508 | .6722 | ||||||
| ✓ | 18.88 | .4388 | .5519 | 13.03 | .2516 | .6018 | 13.36 | .2533 | .5523 | 18.04 | .5145 | .4847 | 12.38 | .1736 | .6545 | ||||||
| ✓ | 19.95 | .4596 | .5394 | 13.52 | .2534 | .5871 | 14.11 | .3087 | .5051 | 19.33 | .6003 | .4133 | 13.13 | .2153 | .6222 | ||||||
| ✓ | 18.70 | .4235 | .5673 | 13.24 | .2505 | .5931 | 13.52 | .2520 | .5438 | 18.15 | .5031 | .4949 | 12.32 | .1683 | .6617 | ||||||
| ✓ | ✓ | 18.36 | .4140 | .5667 | 13.14 | .2482 | .5975 | 13.40 | .2549 | .5461 | 17.90 | .5098 | .4857 | 12.37 | .1634 | .6658 | |||||
| ✓ | ✓ | 20.06 | .4637 | .5299 | 13.56 | .2593 | .5828 | 14.51 | .3204 | .4869 | 19.40 | .5956 | .4198 | 13.07 | .2189 | .6230 | |||||
| ✓ | ✓ | ✓ | 20.07 | .4612 | .5290 | 13.62 | .2678 | .5835 | 14.38 | .3182 | .4913 | 19.51 | .6048 | .4146 | 13.09 | .2173 | .6256 | ||||
| Real Scene | Girl | Heron | Parterre | Puppet | Stair | Average | |||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DP-kernel | 11.14 | .2151 | .6485 | 13.63 | .1473 | .5376 | 14.70 | .2226 | .6348 | 14.32 | .2887 | .5930 | 14.38 | .0521 | .6104 | 14.36 | .2506 | .5904 | |||
| ✓ | 10.75 | .1816 | .6600 | 14.05 | .1553 | .5467 | 15.17 | .2340 | .6205 | 14.13 | .2770 | .5934 | 14.24 | .0442 | .6120 | 14.26 | .2414 | .5933 | |||
| ✓ | 12.89 | .3465 | .5645 | 14.48 | .1677 | .5209 | 16.20 | .2511 | .5927 | 14.48 | .2941 | .5819 | 15.81 | .1167 | .6039 | 15.46 | .3035 | .5465 | |||
| ✓ | 11.09 | .2039 | .6398 | 13.52 | .1381 | .5553 | 14.73 | .2355 | .6403 | 14.37 | .2918 | .5857 | 14.49 | .0555 | .6165 | 14.28 | .2490 | .5896 | |||
| ✓ | ✓ | 11.19 | .2311 | .6275 | 13.86 | .1524 | .5365 | 15.44 | .2498 | .6124 | 14.03 | .2771 | .6020 | 14.40 | .0518 | .6231 | 14.00 | .2587 | .5830 | ||
| ✓ | ✓ | 12.78 | .3357 | .5685 | 14.45 | .1741 | .5228 | 16.36 | .2643 | .5939 | 14.56 | .2958 | .5918 | 16.11 | .1267 | .6054 | 15.40 | .3009 | .5527 | ||
| ✓ | ✓ | ✓ | 13.11 | .3707 | .5486 | 14.17 | .1669 | .5285 | 16.19 | .2527 | .5908 | 15.25 | .3277 | .5739 | 16.30 | .1343 | .6133 | 15.57 | .3114 | .5467 | |
| DN-kernel | 10.94 | .2031 | .6436 | 13.97 | .1459 | .5499 | 15.02 | .2320 | .6431 | 14.28 | .2764 | .6036 | 14.40 | .0525 | .6313 | 14.41 | .2506 | .5921 | |||
| ✓ | 10.43 | .1696 | .6654 | 13.10 | .1336 | .5652 | 15.09 | .2075 | .6536 | 14.66 | .3000 | .5950 | 14.36 | .0528 | .6122 | 14.33 | .2495 | .5937 | |||
| ✓ | 12.55 | .3184 | .5736 | 14.51 | .1850 | .5217 | 16.65 | .2830 | .5953 | 14.68 | .2944 | .5924 | 15.93 | .1189 | .6081 | 15.44 | .3037 | .5558 | |||
| ✓ | 11.19 | .2214 | .6475 | 13.95 | .1421 | .5508 | 14.30 | .2189 | .6739 | 14.99 | .3117 | .5894 | 14.35 | .0574 | .6164 | 14.47 | .2549 | .5939 | |||
| ✓ | ✓ | 11.55 | .2299 | .6195 | 13.93 | .1543 | .5382 | 14.92 | .2291 | .6399 | 14.74 | .3042 | .6001 | 14.43 | .0556 | .6211 | 14.47 | .2563 | .5881 | ||
| ✓ | ✓ | 12.70 | .3438 | .5627 | 14.57 | .1779 | .5200 | 16.51 | .2872 | .5825 | 14.24 | .2848 | .6097 | 16.02 | .1216 | .6018 | 15.46 | .3073 | .5519 | ||
| ✓ | ✓ | ✓ | 12.85 | .3418 | .5585 | 14.30 | .1706 | .5197 | 16.61 | .2903 | .5912 | 14.91 | .3141 | .5886 | 15.97 | .1255 | .6125 | 15.53 | .3112 | .5515 | |
| Kernel Type | Synthetic Scene | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DP-kernel | 19.20 | .5175 | .3813 | 21.50 | .6242 | .1980 | 21.85 | .4235 | .3117 | 17.30 | .5265 | .3381 | 19.35 | .5765 | .3084 | 19.84 | .5336 | .3075 | |||
| ✓ | 19.01 | .4914 | .4082 | 21.69 | .6356 | .1889 | 22.62 | .4520 | .3013 | 16.61 | .4789 | .3771 | 17.82 | .5385 | .3475 | 19.55 | .5193 | .3246 | |||
| ✓ | 18.22 | .4638 | .4144 | 22.48 | .6603 | .1762 | 23.11 | .4709 | .2791 | 18.18 | .5517 | .3124 | 18.83 | .5657 | .3299 | 20.16 | .5425 | .3024 | |||
| ✓ | 18.79 | .4972 | .3974 | 22.59 | .6760 | .2314 | 22.41 | .4348 | .3011 | 16.88 | .4913 | .3606 | 17.59 | .5194 | .3652 | 19.65 | .5237 | .3311 | |||
| ✓ | ✓ | 19.09 | .5253 | .3889 | 25.83 | .7796 | .1709 | 24.13 | .5229 | .2474 | 16.95 | .5017 | .3501 | 18.56 | .5764 | .3167 | 20.91 | .5812 | .2948 | ||
| ✓ | ✓ | 17.62 | .4227 | .4615 | 23.43 | .7266 | .1688 | 22.71 | .4454 | .2850 | 15.64 | .4150 | .4308 | 18.84 | .5722 | .3209 | 19.65 | .5164 | .3334 | ||
| ✓ | ✓ | ✓ | 18.99 | .4770 | .4034 | 26.51 | .8051 | .1627 | 23.33 | .4888 | .2733 | 17.51 | .5371 | .3356 | 18.92 | .5799 | .3126 | 21.05 | .5776 | .2975 | |
| DN-kernel | 17.26 | .3740 | .5088 | 25.51 | .7767 | .1897 | 23.38 | .5068 | .2649 | 15.91 | .4209 | .4198 | 17.91 | .5213 | .3661 | 19.99 | .5199 | .3499 | |||
| ✓ | 16.89 | .3611 | .5353 | 25.82 | .7876 | .1770 | 22.92 | .4820 | .2809 | 15.52 | .4381 | .4173 | 18.07 | .5317 | .3684 | 19.89 | .5201 | .3558 | |||
| ✓ | 16.33 | .3387 | .5636 | 25.55 | .7813 | .1874 | 24.28 | .5544 | .2649 | 16.60 | .4635 | .3781 | 17.96 | .5095 | .3870 | 19.44 | .5295 | .3562 | |||
| ✓ | 16.49 | .3444 | .5691 | 25.40 | .7674 | .1982 | 21.87 | .4194 | .3203 | 16.48 | .4798 | .3830 | 18.38 | .5412 | .3445 | 19.72 | .5104 | .3630 | |||
| ✓ | ✓ | 17.11 | .3766 | .5195 | 25.43 | .7770 | .1891 | 22.41 | .4585 | .2864 | 16.63 | .4792 | .3826 | 18.57 | .5559 | .3476 | 20.03 | .5294 | .3450 | ||
| ✓ | ✓ | 16.22 | .3389 | .5637 | 25.12 | .7566 | .1950 | 23.00 | .4792 | .2810 | 17.37 | .5088 | .3661 | 18.08 | .5275 | .3677 | 19.96 | .5222 | .3547 | ||
| ✓ | ✓ | ✓ | 16.91 | .3693 | .5357 | 25.79 | .7872 | .1801 | 25.48 | .6042 | .2405 | 16.58 | .4705 | .3793 | 18.10 | .5514 | .3414 | 20.57 | .5565 | .3354 | |
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | ||||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| DP-kernel | 23.20 | .5842 | .3847 | 17.42 | .4046 | .4658 | 19.26 | .5323 | .3374 | 24.05 | .7597 | .2624 | 14.98 | .3018 | .5618 | ||||||
| ✓ | 23.55 | .6053 | .3685 | 18.32 | .4442 | .4292 | 19.35 | .5340 | .3339 | 23.17 | .7442 | .2670 | 16.14 | .3739 | .5082 | ||||||
| ✓ | 22.52 | .5522 | .3689 | 20.31 | .5388 | .3364 | 19.16 | .5203 | .3430 | 25.62 | .7884 | .2082 | 17.33 | .4081 | .4777 | ||||||
| ✓ | 23.18 | .5817 | .3878 | 17.63 | .4194 | .4475 | 19.53 | .5441 | .3325 | 24.85 | .7885 | .2467 | 14.99 | .3407 | .5267 | ||||||
| ✓ | ✓ | 23.30 | .5893 | .3904 | 18.49 | .4615 | .3926 | 19.14 | .5385 | .3408 | 24.05 | .7716 | .2494 | 15.25 | .3458 | .5274 | |||||
| ✓ | ✓ | 22.36 | .5504 | .3612 | 19.61 | .5134 | .3661 | 19.27 | .5458 | .3316 | 27.55 | .8167 | .2242 | 16.53 | .3902 | .4867 | |||||
| ✓ | ✓ | ✓ | 23.39 | .6010 | .3806 | 20.41 | .5451 | .3305 | 19.48 | .5531 | .3251 | 27.77 | .8364 | .2049 | 16.33 | .3914 | .4950 | ||||
| DN-kernel | 21.90 | .5182 | .4609 | 17.15 | .4331 | .4316 | 19.34 | .5278 | .3407 | 23.10 | .7302 | .2873 | 14.94 | .3201 | .5471 | ||||||
| ✓ | 21.94 | .5220 | .4571 | 17.38 | .4464 | .4298 | 19.26 | .5401 | .3418 | 23.03 | .7264 | .2830 | 14.82 | .3293 | .5363 | ||||||
| ✓ | 21.85 | .5168 | .4514 | 17.87 | .4641 | .4014 | 19.23 | .5289 | .3467 | 26.91 | .8082 | .2473 | 16.69 | .4031 | .4859 | ||||||
| ✓ | 21.85 | .5313 | .4392 | 16.97 | .4301 | .4228 | 19.45 | .5443 | .3403 | 23.78 | .7679 | .2754 | 15.18 | .3549 | .5112 | ||||||
| ✓ | ✓ | 22.06 | .5319 | .4481 | 16.75 | .4308 | .4333 | 19.34 | .5421 | .3373 | 23.44 | .7421 | .2943 | 14.86 | .3429 | .5299 | |||||
| ✓ | ✓ | 22.09 | .5299 | .4477 | 17.81 | .4854 | .3812 | 19.31 | .5400 | .3384 | 27.40 | .8263 | .2353 | 16.93 | .4023 | .4879 | |||||
| ✓ | ✓ | ✓ | 22.28 | .5506 | .4334 | 18.69 | .5058 | .3774 | 19.28 | .5414 | .3371 | 26.76 | .8126 | .2419 | 17.12 | .4192 | .4761 | ||||
| Real Scene | Girl | Heron | Parterre | Puppet | Stair | Average | |||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DP-kernel | 15.40 | .5237 | .4318 | 18.68 | .4292 | .3352 | 17.62 | .2987 | .4991 | 17.61 | .4369 | .4313 | 19.44 | .3107 | .4657 | 18.77 | .4582 | .4175 | |||
| ✓ | 15.67 | .5342 | .4274 | 18.44 | .4145 | .3322 | 17.37 | .2900 | .4935 | 18.49 | .4765 | .3982 | 19.85 | .3433 | .4503 | 19.04 | .4760 | .4008 | |||
| ✓ | 17.03 | .6045 | .3636 | 18.90 | .4526 | .3185 | 18.38 | .3323 | .4575 | 17.89 | .4408 | .4333 | 20.33 | .3416 | .4297 | 19.75 | .4980 | .3737 | |||
| ✓ | 14.80 | .4950 | .4538 | 18.83 | .4336 | .3308 | 17.81 | .3089 | .4915 | 18.12 | .4505 | .4205 | 20.23 | .3615 | .4422 | 19.00 | .4724 | .4080 | |||
| ✓ | ✓ | 15.57 | .5297 | .4349 | 19.04 | .4578 | .3278 | 17.88 | .3094 | .4887 | 17.84 | .4461 | .4329 | 19.47 | .3102 | .4522 | 19.00 | .4760 | .4037 | ||
| ✓ | ✓ | 16.78 | .5919 | .3806 | 18.99 | .4575 | .3166 | 18.28 | .3333 | .4630 | 17.63 | .4272 | .4243 | 20.36 | .3594 | .4201 | 19.74 | .4986 | .3774 | ||
| ✓ | ✓ | ✓ | 16.47 | .5855 | .3835 | 19.09 | .4624 | .3194 | 18.36 | .3375 | .4715 | 17.97 | .4612 | .4206 | 21.25 | .4045 | .4044 | 20.05 | .5178 | .3736 | |
| DN-kernel | 15.62 | .5351 | .4206 | 18.85 | .4350 | .3398 | 19.71 | .4318 | .4549 | 17.77 | .4400 | .4358 | 20.49 | .3901 | .4326 | 18.89 | .4761 | .4151 | |||
| ✓ | 15.04 | .5147 | .4312 | 18.75 | .4291 | .3585 | 20.73 | .4841 | .4379 | 18.15 | .4647 | .4248 | 20.45 | .3825 | .4249 | 18.96 | .4839 | .4125 | |||
| ✓ | 17.13 | .6103 | .3623 | 18.96 | .4527 | .3366 | 20.47 | .4735 | .4464 | 18.39 | .4694 | .4156 | 20.94 | .3914 | .4432 | 19.84 | .5118 | .3937 | |||
| ✓ | 15.17 | .5215 | .4383 | 18.97 | .4367 | .3480 | 20.57 | .4833 | .4463 | 18.24 | .4620 | .4252 | 20.42 | .3752 | .4578 | 19.06 | .4907 | .4105 | |||
| ✓ | ✓ | 15.48 | .5272 | .4282 | 19.00 | .4430 | .3458 | 20.37 | .4801 | .4401 | 18.08 | .4577 | .4276 | 20.05 | .3635 | .4601 | 18.94 | .4861 | .4145 | ||
| ✓ | ✓ | 17.07 | .6081 | .3706 | 18.95 | .4514 | .3254 | 20.64 | .4854 | .4385 | 18.03 | .4510 | .4298 | 21.05 | .4086 | .4182 | 19.93 | .5188 | .3873 | ||
| ✓ | ✓ | ✓ | 16.95 | .5975 | .3823 | 19.04 | .4558 | .3315 | 20.74 | .4916 | .4323 | 18.11 | .4616 | .4202 | 20.80 | .3948 | .4386 | 19.98 | .5231 | .3871 | |
| Kernel Type | Synthetic Scene | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DP-kernel | 21.63 | .6402 | .2984 | 27.63 | .8475 | .1224 | 25.36 | .6227 | .1861 | 21.27 | .6818 | .2023 | 22.49 | .7259 | .1899 | 23.68 | .7036 | .1998 | |||
| ✓ | 21.84 | .6556 | .2947 | 27.48 | .8419 | .1272 | 26.73 | .6891 | .1687 | 22.57 | .7289 | .1950 | 22.15 | .7160 | .2015 | 24.15 | .7263 | .1974 | |||
| ✓ | 19.30 | .5628 | .3553 | 27.56 | .8408 | .1262 | 28.10 | .7374 | .1544 | 21.83 | .7128 | .2074 | 22.34 | .7197 | .1928 | 23.83 | .7147 | .2072 | |||
| ✓ | 20.52 | .5994 | .3224 | 27.29 | .8322 | .1349 | 27.07 | .7002 | .1719 | 22.50 | .7306 | .1958 | 22.07 | .7127 | .2011 | 23.89 | .7150 | .2052 | |||
| ✓ | ✓ | 21.27 | .6104 | .3191 | 27.39 | .8376 | .1301 | 28.54 | .7518 | .1608 | 22.32 | .7290 | .1966 | 21.87 | .7109 | .2037 | 24.28 | .7279 | .2021 | ||
| ✓ | ✓ | 18.43 | .5407 | .3738 | 27.44 | .8399 | .1313 | 27.89 | .7321 | .1596 | 22.02 | .7197 | .2071 | 21.87 | .7118 | .2046 | 23.53 | .7088 | .2153 | ||
| ✓ | ✓ | ✓ | 21.29 | .6179 | .3261 | 27.34 | .8340 | .1298 | 28.19 | .7365 | .1606 | 22.30 | .7233 | .2017 | 22.21 | .7159 | .2036 | 24.27 | .7255 | .2044 | |
| DN-kernel | 18.77 | .5048 | .3890 | 26.67 | .8214 | .1475 | 27.50 | .7116 | .1783 | 21.10 | .6693 | .2517 | 21.58 | .6921 | .2263 | 23.12 | .6798 | .2386 | |||
| ✓ | 17.87 | .4554 | .4370 | 26.76 | .8239 | .1462 | 28.12 | .7316 | .1735 | 21.69 | .6979 | .2282 | 21.61 | .6887 | .2294 | 23.59 | .6795 | .2429 | |||
| ✓ | 18.06 | .4849 | .4104 | 26.54 | .8159 | .1486 | 28.09 | .7392 | .1725 | 20.97 | .6866 | .2394 | 21.71 | .6895 | .2320 | 24.33 | .6832 | .2406 | |||
| ✓ | 19.22 | .5397 | .3756 | 26.52 | .8184 | .1514 | 27.72 | .7242 | .1828 | 21.67 | .6961 | .2306 | 21.64 | .6920 | .2300 | 23.35 | .6941 | .2341 | |||
| ✓ | ✓ | 19.77 | .5461 | .3692 | 26.63 | .8192 | .1480 | 28.17 | .7353 | .1733 | 21.08 | .6878 | .2367 | 21.39 | .6821 | .2347 | 23.41 | .6941 | .2324 | ||
| ✓ | ✓ | 17.50 | .4349 | .4613 | 26.72 | .8226 | .1491 | 27.40 | .7046 | .1848 | 21.73 | .6962 | .2369 | 21.20 | .6688 | .2477 | 22.91 | .6654 | .2560 | ||
| ✓ | ✓ | ✓ | 18.33 | .5144 | .4004 | 26.63 | .8184 | .1513 | 28.16 | .7344 | .1755 | 22.06 | .6988 | .2245 | 21.43 | .6855 | .2380 | 23.32 | .6903 | .2379 | |
| Real Scene | Ball | Basket | Buick | Coffee | Decoration | ||||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| DP-kernel | 24.73 | .6651 | .3107 | 23.24 | .6643 | .2494 | 21.65 | .6418 | .2445 | 25.52 | .7949 | .2170 | 17.48 | .4725 | .4457 | ||||||
| ✓ | 24.93 | .6697 | .3054 | 22.91 | .6688 | .2453 | 21.48 | .6400 | .2580 | 28.12 | .8224 | .1987 | 18.34 | .4934 | .4226 | ||||||
| ✓ | 24.21 | .6412 | .3094 | 22.82 | .6631 | .2508 | 21.17 | .6251 | .2681 | 28.39 | .8448 | .1722 | 19.82 | .5485 | .3697 | ||||||
| ✓ | 24.92 | .6661 | .3111 | 22.27 | .6326 | .2860 | 21.30 | .6234 | .2710 | 26.62 | .7973 | .2259 | 18.07 | .4926 | .4230 | ||||||
| ✓ | ✓ | 24.86 | .6598 | .3181 | 21.29 | .6094 | .3065 | 21.40 | .6359 | .2584 | 28.58 | .8332 | .1910 | 17.78 | .4869 | .4352 | |||||
| ✓ | ✓ | 25.01 | .6691 | .3007 | 23.19 | .6706 | .2481 | 21.12 | .6212 | .2662 | 28.23 | .8410 | .1798 | 19.88 | .5550 | .3606 | |||||
| ✓ | ✓ | ✓ | 24.80 | .6643 | .3200 | 23.32 | .6789 | .2455 | 21.27 | .6234 | .2662 | 28.91 | .8525 | .1902 | 19.69 | .5440 | .3672 | ||||
| DN-kernel | 24.47 | .6473 | .3342 | 23.63 | .7204 | .2108 | 21.45 | .6285 | .2625 | 23.70 | .7604 | .2588 | 17.74 | .4790 | .4296 | ||||||
| ✓ | 23.02 | .5757 | .3964 | 22.96 | .7128 | .2230 | 21.72 | .6389 | .2595 | 26.90 | .8004 | .2354 | 17.21 | .4774 | .4346 | ||||||
| ✓ | 24.15 | .6343 | .3465 | 22.59 | .6894 | .2365 | 21.30 | .6185 | .2678 | 26.41 | .7947 | .2300 | 19.38 | .5272 | .3908 | ||||||
| ✓ | 23.68 | .6175 | .3572 | 22.90 | .7035 | .2255 | 20.95 | .6172 | .2716 | 27.18 | .8083 | 2336 | 18.53 | .5030 | .4084 | ||||||
| ✓ | ✓ | 24.60 | .6530 | .3439 | 22.96 | .7132 | .2296 | 21.43 | .6360 | .2642 | 26.13 | .8178 | .2159 | 18.07 | .4784 | .4420 | |||||
| ✓ | ✓ | 23.93 | .6332 | .3464 | 23.89 | .7342 | .2188 | 21.11 | .6247 | .2747 | 26.88 | .8074 | .2403 | 19.53 | .5383 | .3855 | |||||
| ✓ | ✓ | ✓ | 23.76 | .6184 | .3607 | 23.39 | .7155 | .2329 | 21.66 | .6405 | .2585 | 27.84 | .8388 | .2068 | 19.98 | .5553 | .3644 | ||||
| Real Scene | Girl | Heron | Parterre | Puppet | Stair | Average | |||||||||||||||
| SS | MGS | PD | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DP-kernel | 18.16 | .6622 | .3020 | 19.58 | .4991 | .2905 | 22.36 | .5879 | .3350 | 20.65 | .5868 | .2988 | 23.40 | .5624 | .2986 | 21.68 | .6137 | .2992 | |||
| ✓ | 18.79 | .6771 | .2890 | 19.56 | .4967 | .2903 | 22.53 | .5972 | .3318 | 20.41 | .5765 | .3101 | 23.96 | .5723 | .2997 | 22.10 | .6214 | .2951 | |||
| ✓ | 18.77 | .6833 | .2703 | 19.58 | .4998 | .2856 | 22.27 | .5801 | .3440 | 20.48 | .5790 | .3043 | 23.23 | .5468 | .3149 | 22.07 | .6212 | .2889 | |||
| ✓ | 18.50 | .6650 | .2956 | 19.59 | .4895 | .3003 | 22.45 | .5926 | .3344 | 20.29 | .5687 | .3230 | 23.33 | .5545 | .3120 | 21.73 | .6082 | .3082 | |||
| ✓ | ✓ | 18.36 | .6628 | .2989 | 19.57 | .4920 | .3006 | 22.69 | .6015 | .3296 | 20.38 | .5774 | .3211 | 23.47 | .5462 | .3244 | 21.84 | .6105 | .3084 | ||
| ✓ | ✓ | 19.20 | .6872 | .2695 | 19.45 | .4947 | .2871 | 22.33 | .5833 | .3438 | 20.46 | .5800 | .3035 | 23.34 | .5550 | .3082 | 22.22 | .6257 | .2868 | ||
| ✓ | ✓ | ✓ | 18.96 | .6887 | .2744 | 19.59 | .5051 | .2808 | 22.57 | .5994 | .3317 | 20.60 | .5756 | .3124 | 23.48 | .5509 | .3189 | 22.32 | .6283 | .2907 | |
| DN-kernel | 18.09 | .6582 | .3055 | 19.40 | .4709 | .3166 | 21.92 | .5557 | .3872 | 20.58 | .5834 | .3226 | 22.60 | .4993 | .3349 | 21.36 | .6003 | .3163 | |||
| ✓ | 18.19 | .6615 | .3009 | 19.42 | .4879 | .3052 | 22.18 | .5758 | .3733 | 20.49 | .5823 | .3167 | 23.18 | .5312 | .3330 | 21.53 | .6044 | .3178 | |||
| ✓ | 18.93 | .6856 | .2748 | 19.58 | .4904 | .3122 | 21.91 | .5570 | .3853 | 20.44 | .5810 | .3232 | 22.90 | .5231 | .3294 | 21.76 | .6101 | .3097 | |||
| ✓ | 18.18 | .6538 | .3005 | 19.65 | .4962 | .3083 | 22.34 | .5834 | .3608 | 20.41 | .5785 | .3305 | 23.08 | .5257 | .3458 | 21.69 | .6087 | .3142 | |||
| ✓ | ✓ | 18.74 | .6782 | .2855 | 19.74 | .4948 | .3153 | 22.25 | .5796 | .3658 | 20.45 | .5771 | .3183 | 22.63 | .5009 | .3637 | 21.70 | .6129 | .3144 | ||
| ✓ | ✓ | 18.53 | .6646 | .2923 | 19.45 | .4859 | .3182 | 21.62 | .5510 | .3909 | 20.71 | .5819 | .3126 | 23.18 | .5332 | .3325 | 21.88 | .6154 | .3112 | ||
| ✓ | ✓ | ✓ | 18.86 | .6860 | .2769 | 19.63 | .5011 | .2992 | 22.15 | .5703 | .3787 | 20.81 | .5882 | .3149 | 23.42 | .5340 | .3374 | 22.15 | .6248 | .3030 | |
| Decoration Scene | # of views | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| PSNR() | Blur Kernel | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| RegNeRF [6] | 11.20 | 11.28 | 11.43 | 12.11 | 12.45 | 14.61 | 16.69 | 18.41 | 20.21 | |
| RegNeRF [6] | DP-kernel | 11.15 | 10.84 | 11.07 | 11.54 | 11.43 | 13.50 | 16.16 | 18.56 | 21.75 |
| SSIM() | Blur Kernel | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| RegNeRF [6] | .1064 | .1262 | .1139 | .1589 | .1569 | .2876 | .3956 | .4880 | .5508 | |
| RegNeRF [6] | DP-kernel | .0927 | .1115 | .1058 | .1228 | .1247 | .2034 | .3645 | .4986 | .6526 |
| LPIPS() | Blur Kernel | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 |
| RegNeRF [6] | .7475 | .7059 | .6995 | .7078 | .7061 | .6258 | .5588 | .4818 | .4322 | |
| RegNeRF [6] | DP-kernel | .7520 | .7191 | .7089 | .6992 | .6932 | .6547 | .5277 | .4178 | .2804 |
| Synthetic Scene | Blur Kernel | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Model | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| RegNeRF [6] | 14.57 | .2523 | .6680 | 17.13 | .4616 | .3808 | 14.23 | .1473 | .7298 | 13.01 | .2408 | .5956 | 14.04 | .3227 | .5602 | 14.60 | .2849 | .5869 | |
| RegNeRF [6] | DP-kernel | 14.20 | .2214 | .6412 | 18.88 | .5136 | .3476 | 13.03 | .1003 | .6845 | 9.21 | .0815 | .6920 | 10.86 | .1644 | .6657 | 13.24 | .2162 | .6062 |
| Sparse-DeRF(Ours) | DP-kernel | 14.10 | .2116 | .6413 | 18.97 | .5206 | .3417 | 20.32 | .3488 | .4056 | 12.00 | .1943 | .5902 | 11.36 | .1769 | .6422 | 15.35 | .2904 | .5242 |
| Real Scene | Blur Kernel | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| RegNeRF [6] | 20.48 | .4951 | .5398 | 15.53 | .3388 | .5403 | 17.05 | .4241 | .4361 | 23.24 | .6950 | .3505 | 10.94 | .0816 | .7545 | ||||
| RegNeRF [6] | DP-kernel | 18.58 | .4297 | .5565 | 13.49 | .2429 | .5985 | 12.51 | .2199 | .5579 | 15.75 | .4280 | .5370 | 11.15 | .0927 | .7520 | |||
| Sparse-DeRF(Ours) | DP-kernel | 20.09 | .4583 | .5244 | 14.05 | .2890 | .5555 | 13.78 | .2864 | .5036 | 19.67 | .6084 | .4096 | 13.11 | .2192 | .6192 | |||
| Real Scene | Blur Kernel | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| RegNeRF [6] | 8.31 | .0602 | .7545 | 11.43 | .0951 | .6687 | 15.58 | .2709 | .6510 | 16.02 | .3548 | .5739 | 16.30 | .1816 | .6182 | 15.49 | .2997 | .5888 | |
| RegNeRF [6] | DP-kernel | 7.86 | .0419 | .7737 | 11.57 | .0783 | .6246 | 12.54 | .1524 | .7091 | 10.67 | .1331 | .6604 | 13.49 | .0170 | .6770 | 12.76 | .1836 | .6447 |
| Sparse-DeRF(Ours) | DP-kernel | 13.11 | .3707 | .5486 | 14.17 | .1669 | .5285 | 16.19 | .2527 | .5908 | 15.25 | .3277 | .5739 | 16.30 | .1343 | .6133 | 15.57 | .3114 | .5467 |
| Synthetic Scene | Blur Kernel | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Model | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| RegNeRF [6] | 16.32 | .3441 | .5876 | 23.25 | .7155 | .2663 | 16.21 | .2040 | .6451 | 17.35 | .4915 | .4509 | 18.81 | .5447 | .4020 | 18.39 | .4600 | .4704 | |
| RegNeRF [6] | DP-kernel | 16.71 | .3497 | .4683 | 21.37 | .6471 | .1802 | 15.17 | .1740 | .6666 | 10.27 | .1165 | .6911 | 18.66 | .5412 | .4067 | 16.44 | .3657 | .4826 |
| Sparse-DeRF(Ours) | DP-kernel | 18.99 | .4770 | .4034 | 26.51 | .8051 | .1627 | 23.33 | .4888 | .2733 | 17.51 | .5371 | .3356 | 18.92 | .5799 | .3126 | 21.05 | .5776 | .2975 |
| Real Scene | Blur Kernel | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| RegNeRF [6] | 21.16 | .5100 | .4952 | 18.12 | .4711 | .4569 | 20.11 | .5821 | .3412 | 26.14 | .7837 | .2965 | 11.35 | .1045 | .7030 | ||||
| RegNeRF [6] | DP-kernel | 19.13 | .4391 | .4042 | 17.42 | .4165 | .3746 | 13.31 | .2697 | .4715 | 16.40 | .4684 | .5239 | 11.07 | .1058 | .7089 | |||
| Sparse-DeRF(Ours) | DP-kernel | 23.39 | .6010 | .3806 | 20.41 | .5451 | .3305 | 19.48 | .5531 | .3251 | 27.77 | .8364 | .2049 | 16.33 | .3914 | .4950 | |||
| Real Scene | Blur Kernel | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| RegNeRF [6] | 10.24 | .1511 | .7199 | 18.86 | .4235 | .4194 | 18.68 | .4238 | .5163 | 18.66 | .4788 | .4327 | 21.06 | .3975 | .4706 | 18.44 | .4326 | .4852 | |
| RegNeRF [6] | DP-kernel | 9.52 | .1304 | .7119 | 11.56 | .0595 | .6149 | 13.61 | .1721 | .7245 | 11.10 | .1342 | .6914 | 12.73 | .0249 | .6610 | 13.59 | .2221 | .5887 |
| Sparse-DeRF(Ours) | DP-kernel | 16.47 | .5855 | .3835 | 19.09 | .4624 | .3194 | 18.36 | .3375 | .4715 | 17.97 | .4612 | .4206 | 21.25 | .4045 | .4044 | 20.05 | .5178 | .3736 |
| Synthetic Scene | Blur Kernel | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Model | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| RegNeRF [6] | 17.04 | .3690 | .5729 | 23.40 | .7205 | .2649 | 18.05 | .3610 | .4870 | 20.33 | .5980 | .3745 | 19.63 | .5760 | .3833 | 19.69 | .5249 | .4165 | |
| RegNeRF [6] | DP-kernel | 21.03 | .6273 | .3076 | 27.73 | .8455 | .1238 | 18.04 | .3173 | .4987 | 21.84 | .7246 | .2022 | 19.36 | .5661 | .3908 | 21.60 | .6162 | .3046 |
| Sparse-DeRF(Ours) | DP-kernel | 21.29 | .6179 | .3261 | 27.34 | .8340 | .1298 | 28.19 | .7365 | .1606 | 22.30 | .7233 | .2017 | 22.21 | .7159 | .2036 | 24.27 | .7255 | .2044 |
| Real Scene | Blur Kernel | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| RegNeRF [6] | 21.98 | .5312 | .4677 | 21.67 | .6129 | .3406 | 21.16 | .6215 | .3051 | 25.67 | .7716 | .3105 | 12.45 | .1569 | .7061 | ||||
| RegNeRF [6] | DP-kernel | 25.02 | .6719 | .2953 | 22.95 | .6554 | .2501 | 21.57 | .6456 | .2462 | 23.38 | .7393 | .2341 | 11.43 | .1247 | .6932 | |||
| Sparse-DeRF(Ours) | DP-kernel | 24.80 | .6643 | .3200 | 23.32 | .6789 | .2455 | 21.27 | .6234 | .2662 | 28.91 | .8525 | .1902 | 19.69 | .5440 | .3672 | |||
| Real Scene | Blur Kernel | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| RegNeRF [6] | 11.06 | .1966 | .7091 | 18.96 | .4218 | .4292 | 21.83 | .5526 | .4353 | 20.07 | .5309 | .3827 | 21.69 | .3938 | .4963 | 19.65 | .4790 | .4583 | |
| RegNeRF [6] | DP-kernel | 10.38 | .1434 | .7200 | 12.83 | .1019 | .5757 | 21.34 | .5159 | .3415 | 20.49 | .5799 | .3113 | 13.08 | .2613 | .6581 | 18.25 | .4439 | .4326 |
| Sparse-DeRF(Ours) | DP-kernel | 18.96 | .6887 | .2744 | 19.59 | .5051 | .2808 | 22.57 | .5994 | .3317 | 20.60 | .5756 | .3124 | 23.48 | .5509 | .3189 | 22.32 | .6283 | .2907 |
| Synthetic Scene | Gradient Scaling | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DN-kernel | Naive [51] | 11.93 | .1340 | .6835 | 17.82 | .4573 | .4827 | 18.89 | .3131 | .4237 | 11.45 | .1603 | .6107 | 11.12 | .1769 | .6207 | 14.70 | .2483 | .5643 |
| DN-kernel | MGS | 14.20 | .2107 | .6686 | 21.02 | .5999 | .3326 | 20.30 | .3467 | .4017 | 11.55 | .1804 | .5903 | 11.48 | .1883 | .6351 | 15.12 | .3025 | .5243 |
| DP-kernel | Naive [51] | 11.98 | .1378 | .6799 | 16.54 | .3988 | .5360 | 19.08 | .3135 | .4275 | 11.30 | .1653 | .5992 | 11.14 | .1731 | .6291 | 14.01 | .2377 | .5743 |
| DP-kernel | MGS | 14.33 | .2088 | .6496 | 18.89 | .5032 | .3577 | 19.64 | .3330 | .3950 | 11.69 | .1748 | .6067 | 11.78 | .1948 | .6289 | 15.40 | .2857 | .5289 |
| Real Scene | Gradient Scaling | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| DN-kernel | Naive [51] | 17.96 | .4198 | .5715 | 13.27 | .2431 | .5864 | 13.88 | .2982 | .5075 | 19.17 | .5960 | .4223 | 12.08 | .2076 | .6294 | |||
| DN-kernel | MGS | 19.95 | .4596 | .5394 | 13.52 | .2534 | .5871 | 14.11 | .3087 | .5051 | 19.33 | .6003 | .4133 | 13.13 | .2153 | .6222 | |||
| DP-kernel | Naive [51] | 17.85 | .4053 | .5819 | 13.43 | .2445 | .5694 | 13.97 | .3061 | .5014 | 19.36 | .6070 | .4123 | 12.81 | .2071 | .6238 | |||
| DP-kernel | MGS | 19.80 | .4544 | .5273 | 14.08 | .2706 | .5509 | 13.96 | .3028 | .4992 | 19.72 | .6115 | .4035 | 13.14 | .2198 | .6201 | |||
| Real Scene | Gradient Scaling | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DN-kernel | Naive [51] | 12.40 | .2923 | .5883 | 13.46 | .1458 | .5483 | 16.52 | .2778 | .5930 | 13.76 | .2670 | .5948 | 15.99 | .1122 | .6118 | 14.85 | .2860 | .5653 |
| DN-kernel | MGS | 12.55 | .3184 | .5736 | 14.51 | .1850 | .5217 | 16.65 | .2830 | .5953 | 14.68 | .2944 | .5924 | 15.93 | .1189 | .6081 | 15.44 | .3037 | .5558 |
| DP-kernel | Naive [51] | 12.84 | .3408 | .5621 | 14.32 | .1672 | .5234 | 16.22 | .2547 | .5963 | 12.85 | .2309 | .6045 | 15.80 | .1072 | .6159 | 14.95 | .2871 | .5591 |
| DP-kernel | MGS | 12.89 | .3465 | .5645 | 14.48 | .1677 | .5209 | 16.20 | .2511 | .5927 | 14.48 | .2941 | .5819 | 15.81 | .1167 | .6039 | 15.46 | .3035 | .5465 |
| Synthetic Scene | Gradient Scaling | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DN-kernel | Naive [51] | 12.80 | .1949 | .6631 | 23.41 | .7202 | .2517 | 23.54 | .5069 | .2508 | 14.22 | .3275 | .5065 | 15.41 | .4109 | .4487 | 18.69 | .4321 | .4242 |
| DN-kernel | MGS | 16.33 | .3387 | .5636 | 25.55 | .7813 | .1874 | 24.28 | .5544 | .2649 | 16.60 | .4635 | .3781 | 17.96 | .5095 | .3870 | 19.44 | .5295 | .3562 |
| DP-kernel | Naive [51] | 11.89 | .1392 | .6831 | 22.26 | .6676 | .2354 | 22.36 | .4721 | .2616 | 14.14 | .3024 | .4953 | 15.62 | .3850 | .4351 | 17.25 | .3933 | .4221 |
| DP-kernel | MGS | 18.22 | .4638 | .4144 | 22.48 | .6603 | .1762 | 23.11 | .4709 | .2791 | 18.18 | .5517 | .3124 | 18.83 | .5657 | .3299 | 20.16 | .5425 | .3024 |
| Real Scene | Gradient Scaling | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| DN-kernel | Naive [51] | 21.01 | .4947 | .4699 | 16.89 | .4274 | .4394 | 18.79 | .5123 | .3654 | 26.36 | .7986 | .2604 | 16.77 | .4036 | .4896 | |||
| DN-kernel | MGS | 21.85 | .5168 | .4514 | 17.87 | .4641 | .4014 | 19.23 | .5289 | .3467 | 26.91 | .8082 | .2473 | 16.69 | .4031 | .4859 | |||
| DP-kernel | Naive [51] | 20.06 | .4560 | .4361 | 18.23 | .4615 | .3970 | 18.65 | .5074 | .3611 | 24.80 | .7541 | .2497 | 16.32 | .3843 | .4878 | |||
| DP-kernel | MGS | 22.52 | .5522 | .3689 | 20.31 | .5388 | .3364 | 19.16 | .5203 | .3430 | 25.62 | .7884 | .2082 | 17.33 | .4081 | .4777 | |||
| Real Scene | Gradient Scaling | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DN-kernel | Naive [51] | 16.83 | .5976 | .3730 | 18.60 | .4154 | .3632 | 20.10 | .4602 | .4612 | 16.90 | .4247 | .4646 | 20.53 | .3749 | .4319 | 19.28 | .4909 | .4119 |
| DN-kernel | MGS | 17.13 | .6103 | .3623 | 18.96 | .4527 | .3366 | 20.47 | .4735 | .4464 | 18.39 | .4694 | .4156 | 20.94 | .3914 | .4432 | 19.84 | .5118 | .3937 |
| DP-kernel | Naive [51] | 16.31 | .5787 | .3874 | 18.85 | .4481 | .3152 | 18.21 | .3274 | .4750 | 16.74 | .4101 | .4634 | 20.32 | .3421 | .4415 | 18.85 | .4670 | .4014 |
| DP-kernel | MGS | 17.03 | .6045 | .3636 | 18.90 | .4526 | .3185 | 18.38 | .3323 | .4575 | 17.89 | .4408 | .4333 | 20.33 | .3416 | .4297 | 19.75 | .4980 | .3737 |
| Synthetic Scene | Gradient Scaling | Factory | Cozyroom | Pool | Tanabata | Trolley | Average | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DN-kernel | Naive [51] | 14.70 | .2560 | .6091 | 26.13 | .8080 | .1658 | 27.24 | .7167 | .1810 | 20.29 | .6379 | .2816 | 18.48 | .5824 | .3208 | 22.00 | .6002 | .3117 |
| DN-kernel | MGS | 18.06 | .4849 | .4104 | 26.54 | .8159 | .1486 | 28.09 | .7392 | .1725 | 20.97 | .6866 | .2394 | 21.71 | .6895 | .2320 | 22.40 | .6832 | .2406 |
| DP-kernel | Naive [51] | 14.47 | .2649 | .5744 | 26.71 | .8233 | .1456 | 27.90 | .7330 | .1598 | 20.04 | .6253 | .2528 | 18.63 | .6020 | .2865 | 21.55 | .6097 | .2838 |
| DP-kernel | MGS | 19.30 | .5628 | .3553 | 27.56 | .8408 | .1262 | 28.10 | .7374 | .1544 | 21.83 | .7128 | .2074 | 22.34 | .7197 | .1928 | 23.83 | .7147 | .2072 |
| Real Scene | Gradient Scaling | Ball | Basket | Buick | Coffee | Decoration | |||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | ||||
| DN-kernel | Naive [51] | 22.07 | .5574 | .4040 | 21.76 | .6780 | .2515 | 21.03 | .6107 | .2837 | 27.69 | .8236 | .2275 | 19.72 | .5396 | .3770 | |||
| DN-kernel | MGS | 24.15 | .6343 | .3465 | 22.59 | .6894 | .2365 | 21.30 | .6185 | .2678 | 26.41 | .7947 | .2300 | 19.38 | .5272 | .3908 | |||
| DP-kernel | Naive [51] | 24.04 | .6385 | .3293 | 21.29 | .6075 | .3275 | 20.07 | .6133 | .2724 | 28.42 | .8342 | .1931 | 19.60 | .5366 | .3727 | |||
| DP-kernel | MGS | 24.21 | .6412 | .3094 | 22.82 | .6631 | .2508 | 21.17 | .6251 | .2681 | 28.39 | .8448 | .1722 | 19.82 | .5485 | .3697 | |||
| Real Scene | Gradient Scaling | Girl | Heron | Parterre | Puppet | Stair | Average | ||||||||||||
| Kernel Type | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | PSNR() | SSIM() | LPIPS() | |
| DN-kernel | Naive [51] | 18.68 | .6777 | .2824 | 19.41 | .4885 | .3078 | 21.67 | .5481 | .3963 | 18.24 | .5173 | .3792 | 21.75 | .4360 | .3543 | 21.20 | .5877 | .3274 |
| DN-kernel | MGS | 18.93 | .6856 | .2748 | 19.58 | .4904 | .3122 | 21.91 | .5570 | .3853 | 20.44 | .5810 | .3232 | 22.90 | .5231 | .3294 | 21.76 | .6101 | .3097 |
| DP-kernel | Naive [51] | 18.70 | .6770 | .2789 | 19.13 | .4822 | .2918 | 21.97 | .5665 | .3548 | 18.36 | .5114 | .3739 | 23.27 | .5432 | .3167 | 21.49 | .6010 | .3111 |
| DP-kernel | MGS | 18.77 | .6833 | .2703 | 19.58 | .4998 | .2856 | 22.27 | .5801 | .3440 | 20.48 | .5790 | .3043 | 23.23 | .5468 | .3149 | 22.07 | .6212 | .2889 |