ViMoE: An Empirical Study of Designing Vision Mixture-of-Experts
Abstract
Mixture-of-Experts (MoE) models embody the divide-and-conquer concept and are a promising approach for increasing model capacity, demonstrating excellent scalability across multiple domains. In this paper, we integrate the MoE structure into the classic Vision Transformer (ViT), naming it ViMoE, and explore the potential of applying MoE to vision through a comprehensive study on image classification. However, we observe that the performance is sensitive to the configuration of MoE layers, making it challenging to obtain optimal results without careful design. The underlying cause is that inappropriate MoE layers lead to unreliable routing and hinder experts from effectively acquiring helpful knowledge. To address this, we introduce a shared expert to learn and capture common information, serving as an effective way to construct stable ViMoE. Furthermore, we demonstrate how to analyze expert routing behavior, revealing which MoE layers are capable of specializing in handling specific information and which are not. This provides guidance for retaining the critical layers while removing redundancies, thereby advancing ViMoE to be more efficient without sacrificing accuracy. We aspire for this work to offer new insights into the design of vision MoE models and provide valuable empirical guidance for future research.
1 Introduction
General artificial intelligence is continuously developing toward larger and stronger models (Achiam et al., 2023; Reid et al., 2024; Yang et al., 2024; Dubey et al., 2024). However, larger models require significant computational resources for training and deployment, and balancing performance with efficiency remains a critical issue, especially in resource-constrained environments. A promising approach is to use the Mixture-of-Experts (MoE) (Jacobs et al., 1991; Eigen et al., 2013) layers in neural networks, which decouple model size from inference efficiency. MoE embodies the divide-and-conquer principle, where feature embeddings are routed to selected experts through a gating mechanism, allowing each expert to specialize in a subsets of the data. As a result, each input is processed by only a small portion of the parameters, whereas traditional dense models activate all parameters for every input. This approach is becoming increasingly popular in Natural Language Processing (NLP), as it enables parameter scaling while keeping computational costs at a modest level (Jiang et al., 2024; Dai et al., 2024).
This work focuses on exploring the simple application of MoE in vision models. We convert the classic Vision Transformer (ViT) (Dosovitskiy, 2020) into a sparse MoE structure, naming it ViMoE. Our modification of ViT follows (Riquelme et al., 2021), where the Feed-Forward Networks (FFNs) in each block is replaced with multiple experts, while keeping the structure of each expert the same. For simplicity and efficiency, we choose to select experts at the image level rather than the token level (Daxberger et al., 2023; Liu et al., 2024). Through a comprehensive study on image classification, we explore strategies for configuring MoE in a stable and efficient manner, while also observing several interesting phenomena related to expert routing from different perspectives.
An essential consideration in designing ViMoE is determining how many MoE layers to include and where to position them. A common approach is to insert them into the last ViT blocks (Wu et al., 2022; Liu et al., 2024), which receive the largest gradient magnitudes. Alternatively, one more straightforward approach would be to add MoE layers to all blocks without careful design. We adopt an exhaustive way of scanning the number of layers to determine which configuration yields the optimal accuracy for ViMoE. Interestingly, increasing the number of MoE layers does not always lead to better performance; instead, a downward trend emerges beyond a certain number of layers. We attribute this to the fact that inappropriate MoE layers, particularly in the shallow ViT blocks, not only fail to contribute but also complicate optimization. While scanning and observing can reveal the optimal performance point and the most suitable number of MoE layers, such an approach is invariably laborious. Inspired by Xue et al. (2022); Dai et al. (2024), we introduce a shared expert that absorbs knowledge from the entire dataset, alleviating the inadequacies in individual expert learning and the burden on the routing mechanism. The shared expert brings more excellent stability to ViMoE, as it prevents the accuracy degradation observed with an excessive number of MoE layers. This eliminates the need for constant trial and error to find the optimal point, thereby facilitating a more streamlined design process.
The above are deductions drawn from the scanning results, but we seek further heuristic exploration. Building on the stable ViMoE, we attempt to delve deeper into the routing behavior within MoE layers to uncover what each expert focuses on. Owing to our routing strategy, we can observe how data from each class are distributed across the experts. For the MoE layers in the deeper ViT blocks, the gating network effectively allocates samples of the same class to the same expert, with each expert specializing in processing different data. However, in the shallow blocks, the gating network struggles to consistently route images of the same class to the same expert or effectively guide the experts to specialize in different classes. This suggests that the experts have not learned highly discriminative knowledge; rather, they end up implementing very similar functions, indiscriminately extracting common features across all classes (Riquelme et al., 2021). These results highlights which layers truly fulfill the divide-and-conquer role and which do not, corresponding to the accuracy trends observed through layer scanning.
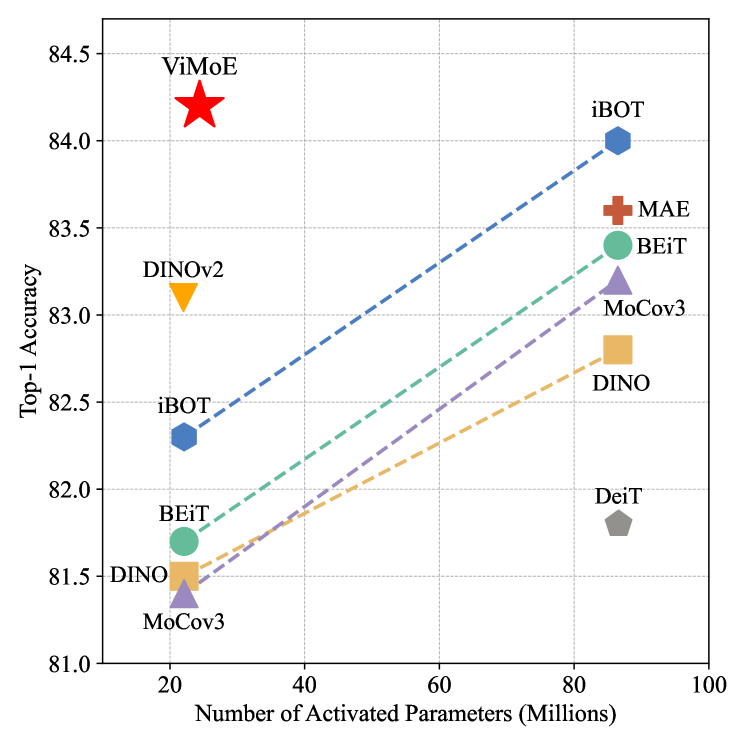
Furthermore, we aim to inform more thoughtful and efficient ViMoE designs through our observations of MoE behavior. One attempt we propose is to estimate the necessary number of MoE layers based on the routing distribution, and then combine this with the number of experts set per layer to approximate the required expert combinations. This insight allows us to simplify the structure by removing potentially redundant MoE layers, thereby achieving a more efficient ViMoE. As a result, our ViMoE based on ViT-S/14 outperforms DINOv2 (Oquab et al., 2023) by 1.1% on ImageNet-1K (Deng et al., 2009) fine-tuning. With less than one-third of the activated parameters, ViMoE even surpasses a number of advanced ViT-B/16 models (Touvron et al., 2021; Bao et al., 2021; Zhou et al., 2021; Zhang et al., 2022; Xinlei et al., 2021; He et al., 2022).
In summary, we believe that as MoE becomes more widely adopted in vision tasks, the observations, evidence, and analyses presented in this study are worth knowing. We hope that our insights and experiences will contribute to advancing this frontier.
2 ViMoE
2.1 Preliminary
Mixture-of-Experts (MoE) (Jacobs et al., 1991; Jordan & Jacobs, 1994) is a promising approach that allows for scaling the number of parameters without increasing computational overhead. For Transformer-based MoE models, the architecture mainly consists of two key components: (1) Sparse MoE Layer: A MoE layer contains experts (denoted as ), each functioning as an independent neural network (Shazeer et al., 2017). (2) Gating Network: This component is responsible for routing the input token to the most appropriate top- experts (Cao et al., 2023). The gate consists of a learnable linear layer, defined as , where is the gate parameter, and is the softmax function. Let represent the set of the top- indices, and output of the layer is then computed as a linear combination of the outputs from the selected experts weighted by the corresponding gate values,
| (1) |
Load Balancing Loss. To encourage load balancing among the experts, we incorporate a differentiable load balancing loss (Lepikhin et al., 2020; Zoph et al., 2022) into each MoE layer, promoting a more balanced distribution of input tokens across the experts. For a batch containing tokens, the auxiliary loss is calculated as a scaled dot product between the vectors and ,
| (2) |
where is the loss coefficient, represents the fraction of tokens routed to expert , and is the fraction of the router probability assigned to expert ,
| (3) |
| (4) |
MoE Transformer. A widely used approach to applying MoE to Transformer models is to replace the Feed-Forward Networks (FFNs) in some of the standard (non-MoE) Transformer blocks with MoE layers (Fedus et al., 2022). Specifically, in an MoE layer, the experts retain the same structure as the original FFNs. The gating function receives the output from the preceding self-attention layer and routes the token representations to different experts.
2.2 Settings for Image Classification
Architecture. We introduce a ViMoE framework to facilitate our study on the application of MoE for image classification. We choose the Vision Transformer (ViT) (Dosovitskiy, 2020) backbone and replace the FFNs in the ViT blocks with MoE layers. Instead of training from scratch (Riquelme et al., 2021), we consider inheriting self-supervised pre-training weights, which reduces training costs while also benefiting from advanced feature representations. Since the experts in the MoE layers share the same structure as the FFNs, we simply replicate the pre-trained weights of the FFNs across each expert for initialization.
Routing Strategy. Recent large-scale sparse MoE models (Achiam et al., 2023; Jiang et al., 2024; Dai et al., 2024; Yang et al., 2024) typically employ a token-based routing strategy, where the gating mechanism assigns each token to selected experts. However, it is worth considering whether this strategy is necessary for MoE in image classification, where the model focuses more on the overall features of the image to predict a single class for the image. We suggest that the routing strategy should align with the specific requirements of the vision task. Routing at the image level (i.e., selecting experts for each entire image) (Daxberger et al., 2023; Liu et al., 2024) is simpler and better suited to the objectives of image classification. In practice, we use the [CLS] token to represent the image as the input to the gating network, since it encapsulates the information from all image tokens and is used for classification prediction. Additionally, unless otherwise specified, we default to selecting only the top-1 routed expert to simplify the architecture. Therefore, compared to token-based routing, this strategy reduces the number of experts activated per image.
Shared Expert. There is often some common sense or shared information across input tokens assigned to different experts. As a result, with a conventional routing strategy, multiple experts may acquire overlapping knowledge within their respective parameters. By designing the shared expert (Xue et al., 2022; Dai et al., 2024) to focus on capturing and consolidating common information, other routed experts can specialize in learning unique knowledge, leading to a more parameter-efficient model composed of a greater number of specialized experts. Consequently, we introduce the shared expert into ViMoE to enable learning common knowledge from all data. In our implementation, we set the number of shared experts to 1, with a structure identical to that of the other experts. The output of the shared expert is added to the output of the selected routed expert, allowing Eq. 1 to be rewritten as,
| (5) |
3 Empirical Observations in Designing ViMoE
3.1 A Stability Strategy for Convenient Design
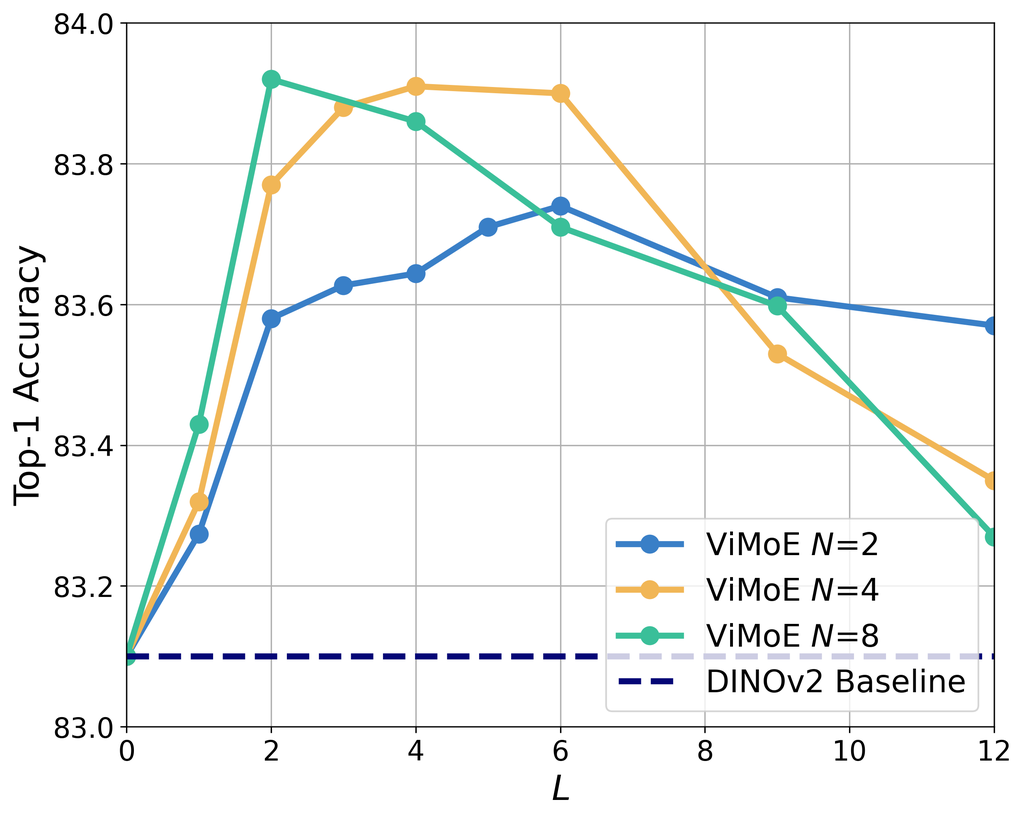
Scanning the Number of MoE Layers. When designing ViMoE, an important consideration is determining how many MoE layers to include and where to place them within the ViT blocks. Here, we start by exploring sparse MoE without the shared expert for simplicity. The most straightforward approach is to place the MoE layer in every ViT block or to select the last blocks where the gradient magnitudes are the largest. To explore reasonable configurations and seek guiding insights, we scan the number of MoE layers and evaluate the accuracy of image classification. Our experiments are based on the DINOv2 (Oquab et al., 2023) pre-trained ViT-S/14 (Dosovitskiy, 2020), modified into ViMoE and fine-tuned on ImageNet-1K (Deng et al., 2009) for epochs (more implementation details are provided in Sec. 4.1). From Fig. 2, it can be observed that regardless of the number of experts, whether , , or , the accuracy consistently exhibits a trend of initially increasing and then decreasing, with this trend becoming more pronounced as increases. This phenomenon has also been mentioned in Daxberger et al. (2023). We hypothesize that introducing multiple experts too early in the shallow ViT blocks leads to optimization difficulties, and the gating network struggles to achieve precise routing due to limited information (a more detailed analyze of this is given in Fig. 5). This suggests a potential instability in the design of ViMoE. Simply adding MoE layers to all ViT blocks without careful consideration may not lead to optimal results. A scan over different values of is required to determine the most suitable number of layers, which inevitably increases the design cost.
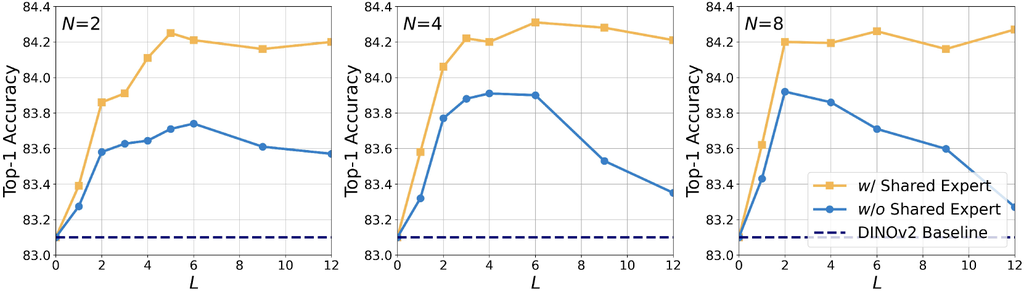
Shared Expert for Stabilising ViMoE. As previously discussed, the shared expert learns and consolidates knowledge from all the data, making it more effective in capturing common information. We consider this structure effective in alleviating challenges of gating decisions and the limitations of individual expert learning in sparse structures. Therefore, we attempt to incorporate the shared expert into ViMoE to mitigate the potential instability in training MoE layers. In Fig. 3 we present a comparison between models with and without shared expert. Incorporating the shared expert allows ViMoE to achieve stable results, eliminating the need for an exhaustive search to determine the optimal number of layers . Even the naive approach of adding MoE layers to all ViT blocks yields good accuracy, preventing performance degradation caused by inappropriate MoE configurations. Additionally, with the inclusion of shared expert, ViMoE achieves a 0.4% improvement in accuracy (84.3% vs. 83.9%), and a 1.2% increase compared to the DINOv2 baseline (83.1%).
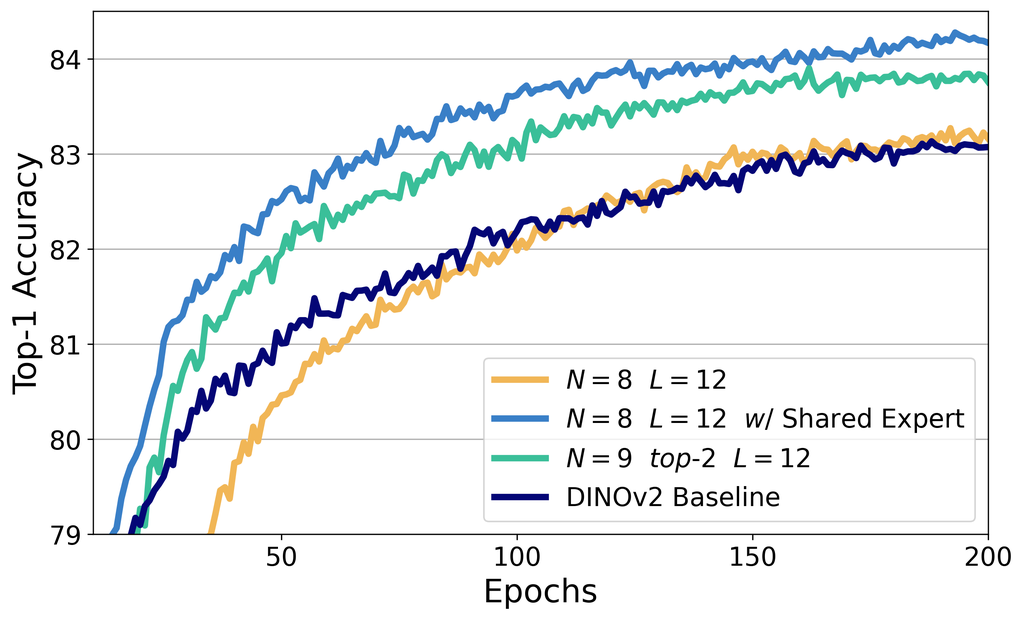
Convergence Advantage. Taking and as an example, Fig. 4 shows the training curves with and without shared expert, along with the DINOv2 baseline for reference. It is evident that simply adding sparse MoE layers slows down convergence in the early training epochs, and the final performance is nearly indistinguishable from the baseline, supporting the hypothesis that an improper MoE setting can even hinder optimization. In contrast, when shared expert is introduced, training becomes more stable, convergence is faster, and accuracy improves significantly. It is worth mentioning that, with the introduction of shared expert, the MoE layers contain a total of 9 experts (1 shared expert and 8 routed experts), and the forward pass activates both the shared expert and one selected routed expert. To ensure a fairer comparison, we conducted an ablation study by selecting the top-2 experts from the 9 routed experts. On one hand, selecting 2 out of 9 can be seen as a denser setup compared to selecting 1 out of 8, which partially mitigates the negative effects of being overly sparse. On the other hand, even with the same number of experts and activated experts, shared expert still demonstrates the advantage with faster convergence and higher accuracy.
3.2 Efficient Exploration Based on Stability
After constructing the stable ViMoE, we further analyze Fig. 3 and observe the presence of a performance plateau. Interestingly, the turning point differs for each . For , , and , accuracy already surpasses 84.2% at , , and , respectively. Beyond these number of layers, no significant improvement is observed by adding more MoE. We attempt to explain these phenomena and propose strategies for designing a more efficient ViMoE.
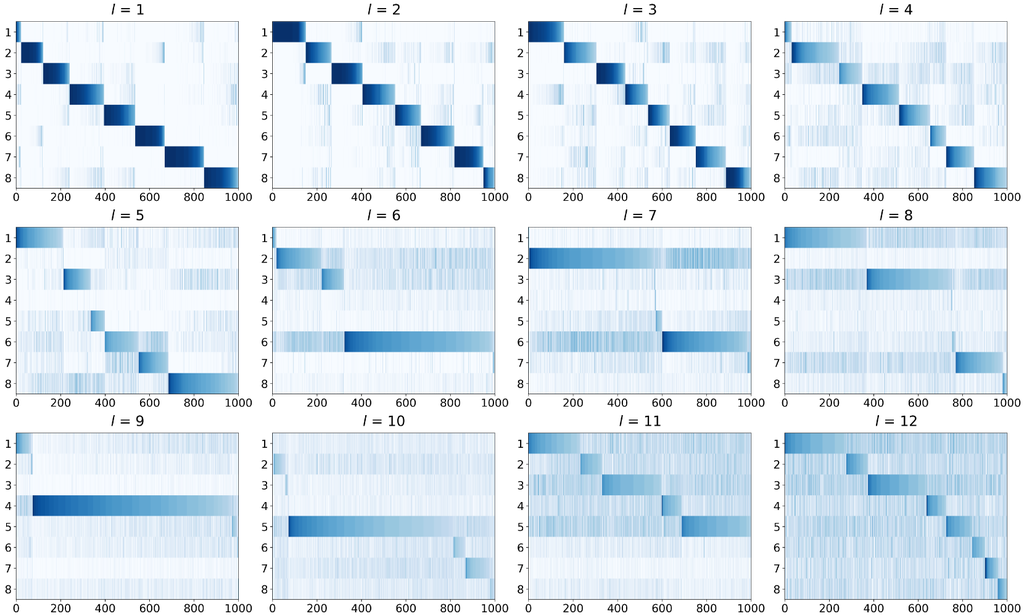
Routing Heatmap. Taking as an example, we plot the routing heatmaps of several MoE layers in Fig. 5. These heatmaps illustrate the distribution of class samples across different experts, helping us observe whether the experts are capable of capturing distinctive information. It can be observed that for the MoE layers in the shallow ViT blocks (e.g., ), the gating network struggles to consistently route images of the same class to the same expert or effectively distinguish the classes each expert should focus on. This indicates that the experts fail to learn highly discriminative knowledge; instead, they are likely performing similar functions, indiscriminately extracting common features. We then focus on the layer where the accuracy plateau occurs for , corresponding to . It is evident that in the last two MoE layers, the gating network can effectively assign the appropriate expert to each class, and the multiple experts can specialize in handling the corresponding data. Therefore, we conclude that the deep layers are where MoE truly achieves its divide-and-conquer objective, with different experts specializing in handling class-specific content. This observation validates the empirical approach of placing MoE layers in the last few ViT blocks (Wu et al., 2022; Liu et al., 2024) as a reasonable strategy. In contrast, MoE struggles to demonstrate its advantages in the shallow ViT blocks, as the use of multiple experts seems unnecessary for capturing basic visual features. The sparse structure may instead introduce optimization difficulties, making the original dense FFN structure a simpler and more suitable choice.
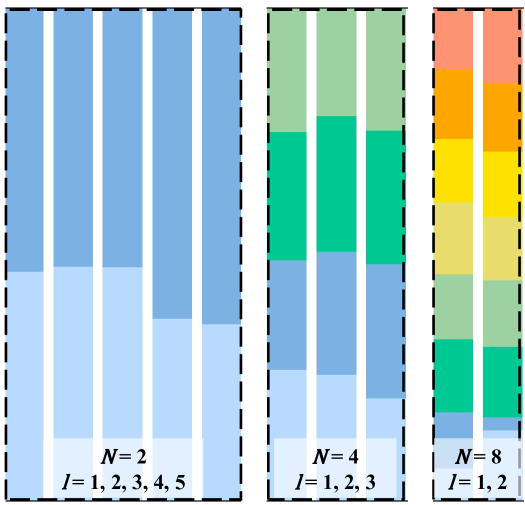
Routing Degree. Another interesting observation is that the number of MoE layers required varies with the number of experts . We suggest this is related to the routing degree, which represents the number of possible expert combinations and can be simply defined as . Since we fix the gating selection to top- (i.e., ), we obtain for , for , and for . This implies that approximately 32 to 64 routing combinations are sufficient for effectively partitioning and processing the data. Fewer combinations may affect performance, while more do not yield further significant gains. From another perspective, if we view the gating network allocating experts to data as a clustering process, the routing degree essentially reflects the number of clusters formed from the dataset. Each expert combination can then specialize in learning from the samples of its corresponding cluster, facilitating the model in reaching optimal effectiveness. Our results validate that end-to-end training can effectively achieve this clustering effect, without the need for additional clustering strategies to provide prior information for the gating mechanism (Liu et al., 2024).
Efficient ViMoE. The above conclusions are drawn from scanning the number of MoE layers. From another perspective, we can approximately predict the routing degree by observing the expert allocation in each layer. As illustrated in Fig. 5, the routing heatmap provides evidence of which MoE layers play a critical role, potentially indicating the necessary expert combinations that impact the results. These insights guide us in refining the structural design, retaining the essential MoE layers while removing the unnecessary ones, thereby developing a more efficient ViMoE. Moreover, we expect these findings are not limited to the ImageNet-1K dataset. In Sec. 4.2, we further explore the transfer of these insights to CIFAR100 (Wang et al., 2017) to validate their generality.
In Table 2, we present various ViMoE configurations and compare their parameter counts. Although sparse MoE layers increase the total number of parameters, since we set the gate to route each image to the top-1 expert, it achieves higher accuracy without increasing the activated parameter counts or the inference burden. With the inclusion of the shared expert, we further improve accuracy at relatively low extra cost. For example, when and , only 2.4M additional activated parameters are required to surpass the baseline by 1.1% in accuracy. Furthermore, a comparison with highlights the efficiency of our structural design for ViMoE, significantly reducing parameter count without sacrificing accuracy.
| w/ Shared Expert | Total Param. | Activate Param. | FLOPs | Acc. | ||
| - | 0 | - | 22.0M | 22.0M | 5.53G | 83.1 |
| 2 | 5 | 27.9M | 22.0M | 5.53G | 83.6 | |
| 2 | 5 | ✓ | 33.8M | 27.9M | 7.04G | 84.3 |
| 2 | 12 | ✓ | 50.4M | 36.2M | 9.17G | 84.2 |
| 4 | 3 | 32.7M | 22.0M | 5.53G | 83.9 | |
| 4 | 3 | ✓ | 36.2M | 25.6M | 6.44G | 84.2 |
| 4 | 12 | ✓ | 78.8M | 36.2M | 9.17G | 84.2 |
| 8 | 2 | 38.6M | 22.0M | 5.53G | 83.9 | |
| 8 | 2 | ✓ | 40.9M | 24.4M | 6.13G | 84.2 |
| 8 | 12 | ✓ | 135.5M | 36.2M | 9.17G | 84.3 |
| Method | Arch. | Activate Param. | FLOPs | Acc. |
| DINO | ViT-S/16 | 22.1M | 4.25G | 81.5 |
| BEiT | ViT-S/16 | 22.1M | 4.25G | 81.7 |
| iBOT | ViT-S/16 | 22.1M | 4.25G | 82.3 |
| DINOv2 | ViT-S/14 | 22.0M | 5.53G | 83.1 |
| DINO | ViT-B/16 | 86.6M | 17.58G | 82.8 |
| MoCov3 | ViT-B/16 | 86.6M | 17.58G | 83.2 |
| BEiT | ViT-B/16 | 86.6M | 17.58G | 83.4 |
| MAE | ViT-B/16 | 86.6M | 17.58G | 83.6 |
| iBOT | ViT-B/16 | 86.6M | 17.58G | 84.0 |
| ViMoE | ViT-S/14 | 22.0M | 5.53G | 83.9 |
| ViMoE⋆ | ViT-S/14 | 24.4M | 6.13G | 84.2 |
| Arch. | Activate Param. | FLOPs | Acc. | ||
| Dense | 0 | - | 22.0M | 5.53G | 83.1 |
| Dense | 2 | - | 24.4M | 6.13G | 83.6 |
| Dense | 3 | - | 25.6M | 6.44G | 83.8 |
| Dense | 5 | - | 27.9M | 7.04G | 83.8 |
| Dense | 12 | - | 36.2M | 9.17G | 83.9 |
| Sparse | 2 | 8 | 24.4M | 6.13G | 84.2 |
| Sparse | 3 | 4 | 25.6M | 6.44G | 84.2 |
| Sparse | 5 | 2 | 27.9M | 7.04G | 84.3 |
| Strategy | Avg. # Experts | Activate Param. | Acc. | ||
| Token | 2 | 8 | 16.3 | 38.9M | 84.1 |
| Token | 3 | 4 | 14.4 | 35.5M | 84.2 |
| Token | 5 | 2 | 14.8 | 33.6M | 84.1 |
| Image | 2 | 8 | 4 | 24.4M | 84.2 |
| Image | 3 | 4 | 6 | 25.6M | 84.2 |
| Image | 5 | 2 | 10 | 27.9M | 84.3 |
4 Experiments
4.1 Image Classification on ImageNet-1K
Implementation Details. All experiments are conducted on the DINOv2 (Oquab et al., 2023) pre-trained ViT-S/14 (Dosovitskiy, 2020) and fine-tuned on ImageNet-1K (Deng et al., 2009) with image resolution for epochs. By default, we use the AdamW (Sun et al., 2021) optimizer with a batch size of , a weight decay of , and a layer-wise learning rate decay of . The peak learning rate is set to with a warm-up of epochs. For the MoE layers, we configure three different numbers of experts (, , and ), selecting the top-1 expert, with the load balancing loss coefficient set to .
Results. Most of the empirical results on the ImageNet-1K benchmark have already been presented earlier. Here, we compare ViMoE against various self-supervised models (Bao et al., 2021; Zhang et al., 2022; Zhou et al., 2021; Oquab et al., 2023; Xinlei et al., 2021; He et al., 2022). As shown in Table 2, ViMoE achieves an 83.9% top-1 accuracy, which is 0.8% higher than DINOv2 without increasing activated parameters. With shared expert, the accuracy further improves to 84.2%, outperforming DINOv2 by 1.1%. Notably, we achieve this performance using only ViT-S/14, surpassing other methods based on ViT-B/16, while activating less than one-third of their parameters.
Comparison with Dense Structures. Previous results validate the advantage of the MoE structure over dense models. However, when we introduce the shared expert, the number of activated parameters increases. To ensure fairness, we attempt to modify the DINOv2 baseline by aligning the number of activated parameters while maintaining a dense architecture. One feasible approach is to mimic the MoE by setting two experts and selecting the top-2, which allows for the addition of an extra FFN in the ViT block.
In Table 4, we present the results of dense structure with different layer counts and compare them with sparse MoE. While increasing the number of parameters provides accuracy gains, the sparse structures are obviously more efficient and have a higher upper bound. For instance, at with 24.4M activated parameters, sparse MoE outperforms the dense one by 0.6%.
Routing Distribution. In Sec. 2.1, we introduce the load balancing loss to assist in training sparse MoE models. Its purpose is to ensure that multiple experts receive inputs more evenly, preventing the majority of data from being routed to a single expert and thus avoiding the model from degrading into a dense structure. We calculate the proportion of data allocated to each expert in the MoE layers, as shown in Fig. 6. It is evident that the gating network distributes the data relatively evenly across multiple experts. Combined with the observations from Fig. 5, this validates the expectation that MoE layers enable different experts to handle specific information.
Routing Strategy. In Sec. 2.2, we introduce the routing strategy, where experts are selected for the entire image rather than for each token. In Table 4, we conduct an ablation study comparing these two strategies, showing no significant difference in accuracy. This indicates that the image-level strategy, while simpler, is effective because it aligns with the task objective of image classification. Additionally, we calculate the average number of routed experts and activated parameters per image, further confirming that our choice is more efficient.
4.2 Validation on CIFAR100
The above-mentioned observations and conclusions are based on ImageNet-1K (Deng et al., 2009). To demonstrate generalizability, we conduct validation on CIFAR100 (Wang et al., 2017) and aim to identify the most suitable ViMoE configuration.
Implementation Details. All models are fine-tuned on CIFAR100 for epochs with a weight decay of . The peak learning rate is set to with a warm-up of epochs, while all other settings remain consistent with those adopted on ImageNet-1K.
Baseline and Stable ViMoE. First, we use the DINOv2 (Oquab et al., 2023) self-supervised pre-trained ViT-S/14 (Dosovitskiy, 2020) and fine-tune it on CIFAR100 as the baseline, which achieves a top-1 accuracy of 91.3%. Next, we convert the ViT blocks into the ViMoE framework. Considering that CIFAR100 has fewer classes and samples than ImageNet-1K, we set the number of experts to in our experiments. Based on prior experience, ViMoE with the shared expert tends to yield stable results, allowing us more flexibility in setting the number of MoE layers. We opt for the most straightforward approach by adding MoE layers to every block, i.e., . Under this setting, ViMoE achieved a top-1 accuracy of 91.6%, surpassing the baseline by 0.3%. Additionally, we compare the model without the shared expert, which yields an accuracy of only 78.4%, falling far short of the baseline. This demonstrates that MoE is not a simple design that guarantees stable gains. In fact, the optimization complexity introduced by sparse structures in certain ViT blocks may have significant negative impacts, further highlighting the necessity of designing a stable ViMoE.
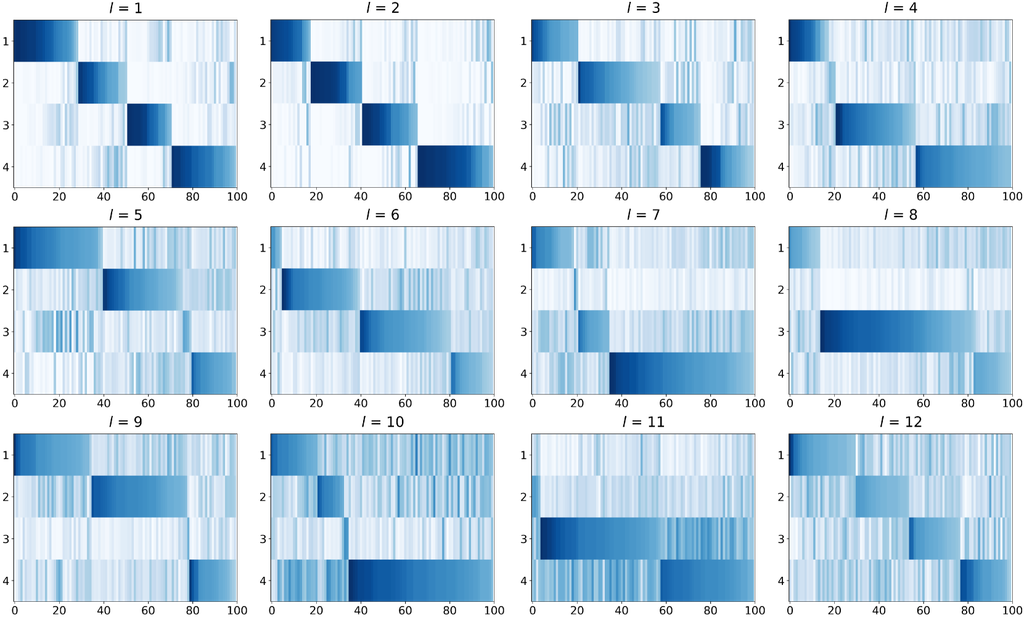
Efficient Structures Derived from Observations. We observe the behavior of MoE within the stable ViMoE and further analyze which layers play a critical role. Following the approach outlined in Sec. 3.2, we generate the routing heatmaps, as shown in Fig. 7. It is evident that in the last two layers, i.e., and , the gating network clusters data classes effectively, allowing each expert to specialize in handling specific classes. In contrast, the shallower layers do not exhibit clear expert specialization, suggesting that these MoE layers may not be necessary and that a single FFN can replace the role of multiple sparse experts. Based on this, we estimate the routing degree for CIFAR100 to be around 4 to 16. To validate this hypothesis, we experiment with the configuration, achieving an accuracy of 91.7%. This setup maintains good results while reducing parameters and improving efficiency.
| w/o Shared Expert | |||||||
| 91.4 | 91.5 | 91.5 | 91.5 | 91.3 | 91.2 | ||
| 91.4 | 91.5 | 91.3 | 90.7 | 89.2 | 78.4 | ||
| 91.5 | 91.3 | 90.8 | 89.9 | 80.9 | 52.9 | ||
| w/ Shared Expert | |||||||
| 91.5 | 91.6 | 91.7 | 91.7 | 91.6 | 91.6 | ||
| 91.6 | 91.7 | 91.7 | 91.7 | 91.7 | 91.6 | ||
| 91.6 | 91.6 | 91.7 | 91.7 | 91.7 | 91.5 | ||
Layer Scanning. We further validate the results by layer scanning, as shown in Table 5. When no shared experts are employed, an unreasonable configuration of the number of MoE layers leads to significantly lower accuracy, which is even more pronounced than what we observed in ImageNet-1K. We attribute this to the fact that on datasets with smaller data volumes and fewer classes, overly sparse architectures hinder each expert from being sufficiently optimized. These results reinforce the necessity of incorporating shared experts to stabilize model convergence. Moreover, for the efficient ViMoE, the required routing degree (i.e., the number of expert combinations) is indeed smaller when the dataset contains fewer classes. It can be observed that incorporating MoE only in the deepest one or two layers is sufficient to achieve considerable accuracy.
Discussion. Comparing the CIFAR100 results with those from ImageNet-1K, we observe that fewer experts are required when there are fewer classes. This aligns with the intuition that having numerous experts handle simpler tasks does not provide additional benefits and may even introduce drawbacks. Therefore, training a smaller number of experts to be specialized and efficient is sufficient.
5 Related Work
Mixture-of-Experts (MoE) (Jacobs et al., 1991) has been widely studied for its ability to modularize learning and reduce interference across data domains (Lewis et al., 2021; Zhou et al., 2022; Rajbhandari et al., 2022; Gou et al., 2023; Xue et al., 2024; Zhu et al., 2024). MoE uses a gating network to assign which experts should handle each data sample. Early MoE models were densely activated, meaning every input triggered all experts, which, while functional, was computationally expensive due to the significant resources required to process each input through all experts (Masoudnia & Ebrahimpour, 2014). Modern mainstream MoE models can be regarded as an application of dynamic neural networks (Han et al., 2021), using sparse activation selecting only a subset of experts to handle each input, which greatly reduces computational costs while preserving model expressiveness and performance (Hwang et al., 2023; Hazimeh et al., 2021). This approach has become increasingly important in large language models, where efficiency and scalability are paramount. Notable works in NLP, such as Switch Transformers (Fedus et al., 2022), GShard (Lepikhin et al., 2020), and GLaM (Du et al., 2022), have successfully applied sparse MoE, demonstrating significant advancements in handling large-scale tasks while optimizing resource usage.
MoE in Vision Tasks. In recent years, the high efficiency of MoE in NLP tasks has motivated researchers to explore their applications in the visual domain. Works such as V-MoE (Riquelme et al., 2021) and M3vit (Fan et al., 2022) integrate sparse MoE architectures into Vision Transformers. By replacing certain dense feedforward layers with sparse MoE layers, these models achieve efficient modeling in image classification tasks, enhancing computational efficiency and performance. Simultaneously, pMoE (Chowdhury et al., 2023) and DiT-MoE (Fei et al., 2024) introduce sparse conditional computation mechanisms. Specifically, pMoE employs CNNs as experts, dynamically selecting image patches for each expert, thereby reducing computational costs while maintaining generalization performance. DiT-MoE optimizes input-dependent sparsity in large diffusion transformer models, improving the efficiency and performance of image generation. Additionally, AdaMV-MoE (Chen et al., 2023) and the work by (Wu et al., 2022) focus on multi-task visual recognition and efficient training of large MoE vision transformers.
Transformer for Vision. Transformer model initially achieved remarkable success in natural language processing and was later introduced into computer vision, leading to the development of Vision Transformers (ViT) (Dosovitskiy, 2020). ViT introduced a new approach to image processing by dividing images into patches and treating them like words in text, allowing for global feature extraction across the entire image. Unlike convolutional neural networks (CNNs) that rely on local receptive fields, ViT’s Transformer-based architecture captures broader context, achieving performance on par with, or exceeding, that of CNNs. In the realm of self-supervised learning, MoCov3 (Xinlei et al., 2021) extended the momentum contrastive learning approach to ViT, successfully training high-quality visual features from unlabeled data. Inspired by BERT’s (Kenton & Toutanova, 2019) masked language modeling, methods such as BEiT (Bao et al., 2021), MAE (He et al., 2022), and iBOT (Zhou et al., 2021) pre-train ViTs through masked image modeling to enhance the model’s generalization ability and representation learning. DINOv2 (Oquab et al., 2023) employed self-supervised learning methods based on knowledge distillation, utilizing larger datasets and longer training periods, allowing it to learn robust visual features in an unsupervised manner, further advancing self-supervised ViT.
6 Conclusion
In this work, we integrate the sparse Mixture-of-Experts (MoE) architecture into the classic Vision Transformer (ViT), termed ViMoE, to explore its potential application in image classification. We report the challenges encountered in designing ViMoE, particularly in determining the configuration of MoE layers without prior guidance, as inappropriate expert arrangements can negatively impact convergence. To mitigate this, we introduce the shared expert to stabilize the training process, thus streamlining the design by eliminating the need for repeated trials to find the optimal configuration. Furthermore, by observing the routing behavior and the distribution of samples across experts, we identify the MoE layers that are crucial for the divide-and-conquer processing of data. These insights allow us to refine the ViMoE architecture, achieving both efficiency and competitive performance. We hope this work provides new insights into the design of MoE models for vision tasks and offers valuable empirical guidance for future research.
References
- Achiam et al. (2023) Josh Achiam, Steven Adler, Sandhini Agarwal, Lama Ahmad, Ilge Akkaya, Florencia Leoni Aleman, Diogo Almeida, Janko Altenschmidt, Sam Altman, Shyamal Anadkat, et al. Gpt-4 technical report. arXiv preprint arXiv:2303.08774, 2023.
- Bao et al. (2021) Hangbo Bao, Li Dong, Songhao Piao, and Furu Wei. Beit: Bert pre-training of image transformers. arXiv preprint arXiv:2106.08254, 2021.
- Cao et al. (2023) Bing Cao, Yiming Sun, Pengfei Zhu, and Qinghua Hu. Multi-modal gated mixture of local-to-global experts for dynamic image fusion. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 23555–23564, 2023.
- Chen et al. (2023) Tianlong Chen, Xuxi Chen, Xianzhi Du, Abdullah Rashwan, Fan Yang, Huizhong Chen, Zhangyang Wang, and Yeqing Li. Adamv-moe: Adaptive multi-task vision mixture-of-experts. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pp. 17346–17357, 2023.
- Chowdhury et al. (2023) Mohammed Nowaz Rabbani Chowdhury, Shuai Zhang, Meng Wang, Sijia Liu, and Pin-Yu Chen. Patch-level routing in mixture-of-experts is provably sample-efficient for convolutional neural networks. In International Conference on Machine Learning, pp. 6074–6114. PMLR, 2023.
- Dai et al. (2024) Damai Dai, Chengqi Deng, Chenggang Zhao, RX Xu, Huazuo Gao, Deli Chen, Jiashi Li, Wangding Zeng, Xingkai Yu, Y Wu, et al. Deepseekmoe: Towards ultimate expert specialization in mixture-of-experts language models. arXiv preprint arXiv:2401.06066, 2024.
- Daxberger et al. (2023) Erik Daxberger, Floris Weers, Bowen Zhang, Tom Gunter, Ruoming Pang, Marcin Eichner, Michael Emmersberger, Yinfei Yang, Alexander Toshev, and Xianzhi Du. Mobile v-moes: Scaling down vision transformers via sparse mixture-of-experts. arXiv preprint arXiv:2309.04354, 2023.
- Deng et al. (2009) Jia Deng, Wei Dong, Richard Socher, Li-Jia Li, Kai Li, and Li Fei-Fei. Imagenet: A large-scale hierarchical image database. In 2009 IEEE conference on computer vision and pattern recognition, pp. 248–255. Ieee, 2009.
- Dosovitskiy (2020) Alexey Dosovitskiy. An image is worth 16x16 words: Transformers for image recognition at scale. arXiv preprint arXiv:2010.11929, 2020.
- Du et al. (2022) Nan Du, Yanping Huang, Andrew M Dai, Simon Tong, Dmitry Lepikhin, Yuanzhong Xu, Maxim Krikun, Yanqi Zhou, Adams Wei Yu, Orhan Firat, et al. Glam: Efficient scaling of language models with mixture-of-experts. In International Conference on Machine Learning, pp. 5547–5569. PMLR, 2022.
- Dubey et al. (2024) Abhimanyu Dubey, Abhinav Jauhri, Abhinav Pandey, Abhishek Kadian, Ahmad Al-Dahle, Aiesha Letman, Akhil Mathur, Alan Schelten, Amy Yang, Angela Fan, et al. The llama 3 herd of models. arXiv preprint arXiv:2407.21783, 2024.
- Eigen et al. (2013) David Eigen, Marc’Aurelio Ranzato, and Ilya Sutskever. Learning factored representations in a deep mixture of experts. arXiv preprint arXiv:1312.4314, 2013.
- Fan et al. (2022) Zhiwen Fan, Rishov Sarkar, Ziyu Jiang, Tianlong Chen, Kai Zou, Yu Cheng, Cong Hao, Zhangyang Wang, et al. M3vit: Mixture-of-experts vision transformer for efficient multi-task learning with model-accelerator co-design. Advances in Neural Information Processing Systems, 35:28441–28457, 2022.
- Fedus et al. (2022) William Fedus, Barret Zoph, and Noam Shazeer. Switch transformers: Scaling to trillion parameter models with simple and efficient sparsity. Journal of Machine Learning Research, 23(120):1–39, 2022.
- Fei et al. (2024) Zhengcong Fei, Mingyuan Fan, Changqian Yu, Debang Li, and Junshi Huang. Scaling diffusion transformers to 16 billion parameters, 2024.
- Gou et al. (2023) Yunhao Gou, Zhili Liu, Kai Chen, Lanqing Hong, Hang Xu, Aoxue Li, Dit-Yan Yeung, James T Kwok, and Yu Zhang. Mixture of cluster-conditional lora experts for vision-language instruction tuning. arXiv preprint arXiv:2312.12379, 2023.
- Han et al. (2021) Yizeng Han, Gao Huang, Shiji Song, Le Yang, Honghui Wang, and Yulin Wang. Dynamic neural networks: A survey. IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(11):7436–7456, 2021.
- Hazimeh et al. (2021) Hussein Hazimeh, Zhe Zhao, Aakanksha Chowdhery, Maheswaran Sathiamoorthy, Yihua Chen, Rahul Mazumder, Lichan Hong, and Ed Chi. Dselect-k: Differentiable selection in the mixture of experts with applications to multi-task learning. Advances in Neural Information Processing Systems, 34:29335–29347, 2021.
- He et al. (2022) Kaiming He, Xinlei Chen, Saining Xie, Yanghao Li, Piotr Dollár, and Ross Girshick. Masked autoencoders are scalable vision learners. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 16000–16009, 2022.
- Hwang et al. (2023) Changho Hwang, Wei Cui, Yifan Xiong, Ziyue Yang, Ze Liu, Han Hu, Zilong Wang, Rafael Salas, Jithin Jose, Prabhat Ram, et al. Tutel: Adaptive mixture-of-experts at scale. Proceedings of Machine Learning and Systems, 5:269–287, 2023.
- Jacobs et al. (1991) Robert A Jacobs, Michael I Jordan, Steven J Nowlan, and Geoffrey E Hinton. Adaptive mixtures of local experts. Neural computation, 3(1):79–87, 1991.
- Jiang et al. (2024) Albert Q Jiang, Alexandre Sablayrolles, Antoine Roux, Arthur Mensch, Blanche Savary, Chris Bamford, Devendra Singh Chaplot, Diego de las Casas, Emma Bou Hanna, Florian Bressand, et al. Mixtral of experts. arXiv preprint arXiv:2401.04088, 2024.
- Jordan & Jacobs (1994) Michael I Jordan and Robert A Jacobs. Hierarchical mixtures of experts and the em algorithm. Neural computation, 6(2):181–214, 1994.
- Kenton & Toutanova (2019) Jacob Devlin Ming-Wei Chang Kenton and Lee Kristina Toutanova. Bert: Pre-training of deep bidirectional transformers for language understanding. In Proceedings of naacL-HLT, volume 1, pp. 2. Minneapolis, Minnesota, 2019.
- Lepikhin et al. (2020) Dmitry Lepikhin, HyoukJoong Lee, Yuanzhong Xu, Dehao Chen, Orhan Firat, Yanping Huang, Maxim Krikun, Noam Shazeer, and Zhifeng Chen. Gshard: Scaling giant models with conditional computation and automatic sharding. arXiv preprint arXiv:2006.16668, 2020.
- Lewis et al. (2021) Mike Lewis, Shruti Bhosale, Tim Dettmers, Naman Goyal, and Luke Zettlemoyer. Base layers: Simplifying training of large, sparse models. In International Conference on Machine Learning, pp. 6265–6274. PMLR, 2021.
- Liu et al. (2024) Zhili Liu, Kai Chen, Jianhua Han, Lanqing Hong, Hang Xu, Zhenguo Li, and James T Kwok. Task-customized masked autoencoder via mixture of cluster-conditional experts. arXiv preprint arXiv:2402.05382, 2024.
- Masoudnia & Ebrahimpour (2014) Saeed Masoudnia and Reza Ebrahimpour. Mixture of experts: a literature survey. Artificial Intelligence Review, 42:275–293, 2014.
- Oquab et al. (2023) Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy Vo, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al. Dinov2: Learning robust visual features without supervision. arXiv preprint arXiv:2304.07193, 2023.
- Rajbhandari et al. (2022) Samyam Rajbhandari, Conglong Li, Zhewei Yao, Minjia Zhang, Reza Yazdani Aminabadi, Ammar Ahmad Awan, Jeff Rasley, and Yuxiong He. Deepspeed-moe: Advancing mixture-of-experts inference and training to power next-generation ai scale. In International conference on machine learning, pp. 18332–18346. PMLR, 2022.
- Reid et al. (2024) Machel Reid, Nikolay Savinov, Denis Teplyashin, Dmitry Lepikhin, Timothy Lillicrap, Jean-baptiste Alayrac, Radu Soricut, Angeliki Lazaridou, Orhan Firat, Julian Schrittwieser, et al. Gemini 1.5: Unlocking multimodal understanding across millions of tokens of context. arXiv preprint arXiv:2403.05530, 2024.
- Riquelme et al. (2021) Carlos Riquelme, Joan Puigcerver, Basil Mustafa, Maxim Neumann, Rodolphe Jenatton, André Susano Pinto, Daniel Keysers, and Neil Houlsby. Scaling vision with sparse mixture of experts. Advances in Neural Information Processing Systems, 34:8583–8595, 2021.
- Shazeer et al. (2017) Noam Shazeer, Azalia Mirhoseini, Krzysztof Maziarz, Andy Davis, Quoc Le, Geoffrey Hinton, and Jeff Dean. Outrageously large neural networks: The sparsely-gated mixture-of-experts layer. arXiv preprint arXiv:1701.06538, 2017.
- Sun et al. (2021) Peize Sun, Rufeng Zhang, Yi Jiang, Tao Kong, Chenfeng Xu, Wei Zhan, Masayoshi Tomizuka, Lei Li, Zehuan Yuan, Changhu Wang, et al. Sparse r-cnn: End-to-end object detection with learnable proposals. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pp. 14454–14463, 2021.
- Touvron et al. (2021) Hugo Touvron, Matthieu Cord, Matthijs Douze, Francisco Massa, Alexandre Sablayrolles, and Hervé Jégou. Training data-efficient image transformers & distillation through attention. In International conference on machine learning, pp. 10347–10357. PMLR, 2021.
- Wang et al. (2017) Fei Wang, Mengqing Jiang, Chen Qian, Shuo Yang, Cheng Li, Honggang Zhang, Xiaogang Wang, and Xiaoou Tang. Residual attention network for image classification. In Proceedings of the IEEE conference on computer vision and pattern recognition, pp. 3156–3164, 2017.
- Wu et al. (2022) Lemeng Wu, Mengchen Liu, Yinpeng Chen, Dongdong Chen, Xiyang Dai, and Lu Yuan. Residual mixture of experts. arXiv preprint arXiv:2204.09636, 2022.
- Xinlei et al. (2021) Chen Xinlei, Xie Saining, and He Kaiming. An empirical study of training self-supervised visual transformers. arXiv preprint arXiv:2104.02057, 8:7, 2021.
- Xue et al. (2022) Fuzhao Xue, Ziji Shi, Futao Wei, Yuxuan Lou, Yong Liu, and Yang You. Go wider instead of deeper. In Proceedings of the AAAI Conference on Artificial Intelligence, volume 36, pp. 8779–8787, 2022.
- Xue et al. (2024) Fuzhao Xue, Zian Zheng, Yao Fu, Jinjie Ni, Zangwei Zheng, Wangchunshu Zhou, and Yang You. Openmoe: An early effort on open mixture-of-experts language models. arXiv preprint arXiv:2402.01739, 2024.
- Yang et al. (2024) An Yang, Baosong Yang, Binyuan Hui, Bo Zheng, Bowen Yu, Chang Zhou, Chengpeng Li, Chengyuan Li, Dayiheng Liu, Fei Huang, et al. Qwen2 technical report. arXiv preprint arXiv:2407.10671, 2024.
- Zhang et al. (2022) Hao Zhang, Feng Li, Shilong Liu, Lei Zhang, Hang Su, Jun Zhu, Lionel M Ni, and Heung-Yeung Shum. Dino: Detr with improved denoising anchor boxes for end-to-end object detection. arXiv preprint arXiv:2203.03605, 2022.
- Zhou et al. (2021) Jinghao Zhou, Chen Wei, Huiyu Wang, Wei Shen, Cihang Xie, Alan Yuille, and Tao Kong. ibot: Image bert pre-training with online tokenizer. arXiv preprint arXiv:2111.07832, 2021.
- Zhou et al. (2022) Yanqi Zhou, Tao Lei, Hanxiao Liu, Nan Du, Yanping Huang, Vincent Zhao, Andrew M Dai, Quoc V Le, James Laudon, et al. Mixture-of-experts with expert choice routing. Advances in Neural Information Processing Systems, 35:7103–7114, 2022.
- Zhu et al. (2024) Tong Zhu, Xiaoye Qu, Daize Dong, Jiacheng Ruan, Jingqi Tong, Conghui He, and Yu Cheng. Llama-moe: Building mixture-of-experts from llama with continual pre-training. arXiv preprint arXiv:2406.16554, 2024.
- Zoph et al. (2022) Barret Zoph, Irwan Bello, Sameer Kumar, Nan Du, Yanping Huang, Jeff Dean, Noam Shazeer, and William Fedus. St-moe: Designing stable and transferable sparse expert models. arXiv preprint arXiv:2202.08906, 2022.