AlpacaFarm: A Simulation Framework for
Methods that Learn from Human Feedback
Abstract
Large language models (LLMs) such as ChatGPT have seen widespread adoption due to their ability to follow user instructions well. Developing these LLMs involves a complex yet poorly understood workflow requiring training with human feedback. Replicating and understanding this instruction-following process faces three major challenges: the high cost of data collection, the lack of trustworthy evaluation, and the absence of reference method implementations. We address these challenges with AlpacaFarm, a simulator that enables research and development for learning from feedback at a low cost. First, we design LLM prompts to simulate human feedback that are 45x cheaper than crowdworkers and display high agreement with humans. Second, we propose an automatic evaluation and validate it against human instructions obtained on real-world interactions. Third, we contribute reference implementations for several methods (PPO, best-of-, expert iteration, and more) that learn from pairwise feedback. Finally, as an end-to-end validation of AlpacaFarm, we train and evaluate eleven models on 10k pairs of real human feedback and show that the rankings of models trained in AlpacaFarm match the rankings of models trained on human data. As a demonstration of the research possible in AlpacaFarm, we find that methods that use a reward model can substantially improve over supervised fine-tuning and that our reference PPO implementation leads to a +10% improvement in win-rate against Davinci003. We release all components of AlpacaFarm at https://github.com/tatsu-lab/alpaca_farm.
1 Introduction
Large language models (LLMs) (Bommasani21, ; Brown20, ; OpenAI23, ) have demonstrated unprecedented capabilities in following diverse and open-ended instructions (Ouyang22, ; Askell21, ; Longpre23, ). These achievements have often been attributed to the fine-tuning of pretrained LLMs using human feedback, but this process remains poorly understood due to the lack of published information on the training methods from LLM vendors. For example, it was recently revealed that only the Davinci003 model in the instruct series of OpenAI models used reinforcement learning (RL) with the PPO algorithm OpenAI*a , leading some to question the importance of RL in the training process. Understanding and improving these methods requires open and transparent replications of the training process, but this remains challenging due to the cost and complexity associated with methods that learn from human feedback.
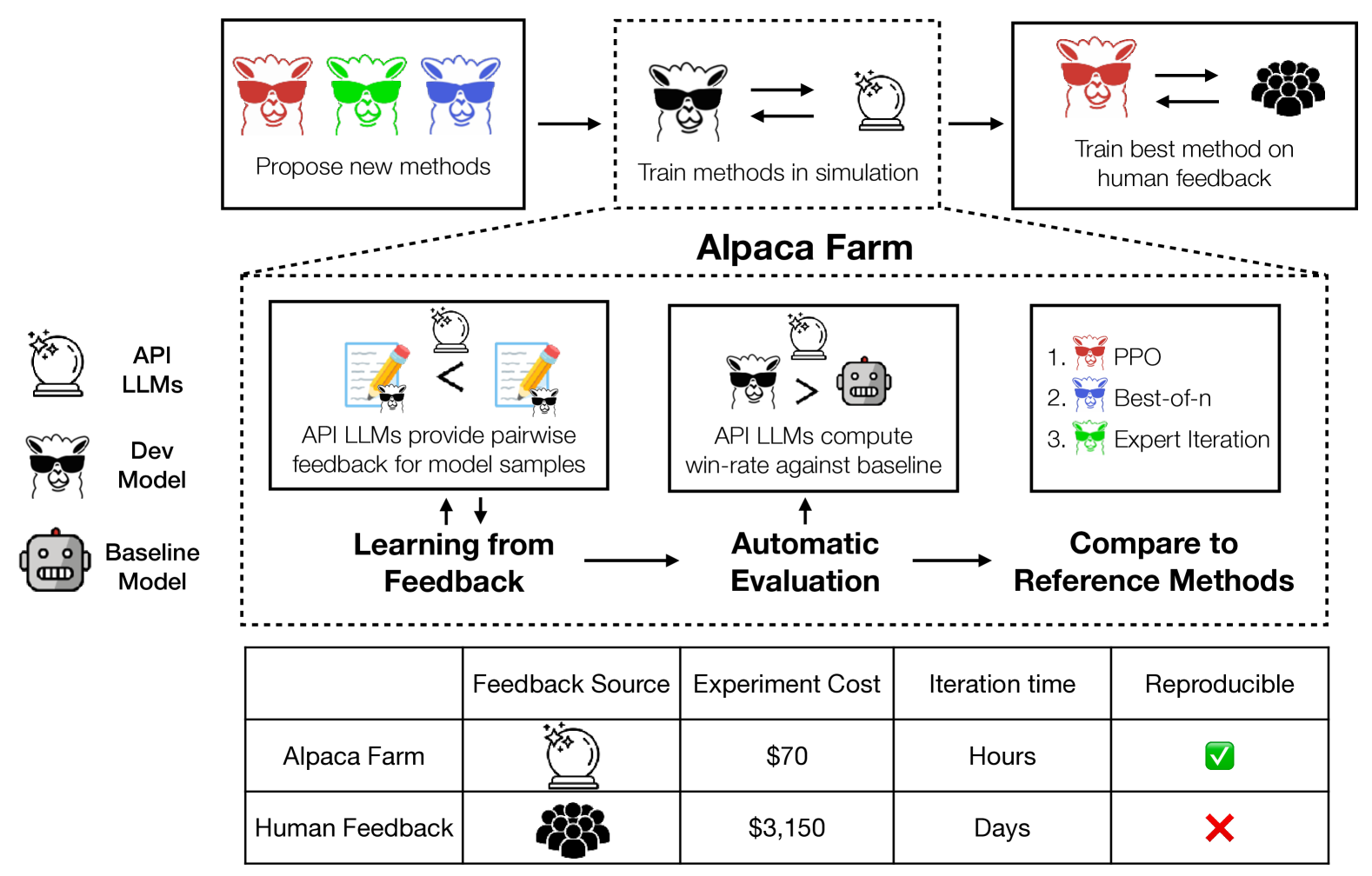
Our goal is to facilitate research and development on instruction following models and methods that learn from human feedback. We identify three main challenges: the high cost of data annotation, the lack of automated evaluation for model development, and the absence of validated implementations of existing methods. To address these three challenges, we introduce AlpacaFarm (Figure 1), a simulation sandbox that enables experimentation at a low cost. Using AlpacaFarm, researchers can rapidly iterate on method development in simulation and transfer these insights to build high-performance systems with actual human feedback.
For the first challenge of data annotation costs, AlpacaFarm simulates human annotators with API LLMs that are faster and lower cost. To collect simulated feedback data, we design prompts for API LLMs (e.g. GPT-4) that enable us to simulate human pairwise comparisons at a cost that is 45x cheaper than crowdworkers, and tune these prompts to faithfully capture many aspects of human annotators, such as their quality judgments, inter-annotator variability, and stylistic preferences.
For the second challenge of automated evaluation, we design an automatic evaluation protocol that attempts to quantify system performance on simple but realistic real-world human instructions. Improving evaluations of open-ended instruction following has been challenging due to the cost and non-replicability of human evaluation, the lack of real human interaction data, and the diversity of natural human instructions. To address this, we use instructions from user interactions (Alpaca Demo (Taori23, )) as a reference for simple but real human interactions and show that we can combine existing public evaluation datasets to mimic this evaluation. Quantitative evaluations of system rankings on our evaluation data show a high correlation with system rankings on the Alpaca Demo instructions.
For the third challenge of missing reference implementations, we implement and test several popular learning algorithms including PPO (Schulman17, ), expert iteration (Anthony17, ), and Quark Lu22*b , and release reference implementations. We show that, among the methods we studied, PPO with a surrogate reward model is the most effective training-time method in our leaderboard, improving the win-rate against Davinci003 of an instruction fine-tuned LLaMA 7B model from 44% to 55%. Other baselines that have been validated on simpler tasks fall short in comparison, highlighting the importance of testing these algorithms in a real instruction-following setting.
As an end-to-end evaluation of the AlpacaFarm, we compare eleven methods trained and evaluated in AlpacaFarm with the same methods trained and evaluated on actual human feedback. We show that the method rankings obtained from developing on AlpacaFarm closely agree with the method rankings obtained from training on actual human data (Spearman correlation of 0.98) and that the best method in AlpacaFarm leads to substantial gains with human feedback. Finally, we find that AlpacaFarm can replicate qualitative behaviors of human feedback such as over-optimization of the reward model, suggesting that AlpacaFarm serves as an effective way for researchers to rapidly study and develop methods that learn from human feedback.
2 Background & problem statement
To begin, we introduce the instruction following task and the pairwise-comparison-based human feedback setting that we study. With this background, we formally define the goals of developing a low-cost simulator for studying instruction following and learning from human feedback.
2.1 Learning to follow instructions
In the instruction following task Ouyang22 ; Bai22*a ; Wang22*b ; Longpre23 , we are presented with user instructions (e.g. “Tell me something about Alpacas”), and our goal is to develop a model that generates high-quality responses as judged by an unobserved human reward function .
While there are a rich set of methods that learn from human feedback to directly optimize (see Section 6), in this work we focus on the setting of learning from pairwise feedback (LPF) due to its central role in recent instruction-following LLMs Ouyang22 . The starting point of this process is a model that is fine-tuned on instruction-following demonstrations , which we denote as . The LPF process then involves taking pairs of samples from , querying humans for which sample within each pair is better, and learning from this pairwise feedback. Since all methods start from the SFT base, we use for notational simplicity.
Learning from pairwise feedback (LPF).
More formally, we define the pairwise feedback dataset as . In this notation, a human annotator rates two candidate responses for the instruction . These binary ratings are assumed to be generated according to their unobserved reward and indicates a (potentially stochastic) comparison for the better response , where .
Many algorithms have been proposed to learn on . Some algorithms like RLHF Christiano17*b ; Ouyang22 learn a surrogate reward function as the learning signal and some operate more directly on . We defer the discussion of different learning algorithms to Section 3.4.
Pairwise evaluation.
Once instruction-following models are trained, researchers need to evaluate these models. One common approach for evaluating models is pairwise model evaluation (Chiang23, ; Geng23, ; Bai22, ), which performs pairwise comparisons on outputs generated by the model and a reference model . Concretely, we collect pairwise preference for two models (), which is aggregated by computing the average win-rate – the percentage of times is preferred to . Researchers can then compare LPF models by their win-rates against the same reference model.
2.2 Problem statement
The goal of AlpacaFarm is to provide three key components that enable rapid research and development of instruction following models: low-cost pairwise feedback generators, automated evaluations for methods development, and reference implementations for comparison and modification. With these three components, researchers can develop new methods in simulation and transfer these insights to build high-performance systems on actual human feedback.
For pairwise feedback, we substitute human preference judgements with a simulated preference using API LLMs. Our goal is to construct a that is both low-cost and faithfully captures different aspects of human preference feedback, such as quality judgments, inter-annotator agreement rates, and stylistic preferences.
For evaluations, we evaluate system outputs using the pairwise preference simulator and identify evaluation datasets that reflect natural human-LLM interactions. The goal for our evaluations is to ensure that system rankings on the new evaluation dataset closely match both human rankings and rankings on instructions from real usage of the Alpaca Demo.
For reference methods, we develop and evaluate six LPF methods. Our goal will be to provide simple and working implementations that provide substantial improvements on both simulated and human feedback data. This will allow researchers to build upon and compare to competitive baselines in a complex instruction-following environment.
AlpacaFarm combines these three components into a simulation framework for learning from pairwise feedback. We evaluate the complete system by an end-to-end workflow of developing methods in simulation and transferring the insights to the real world.
Concretely, we will run each method on the simulated preferences (called ) and evaluate with simulated rankings . In parallel, we will run on human preferences (called ) and evaluate with human rankings . We consider AlpacaFarm to be successful if the simulated method rankings correlate well with the human method rankings. The rest of this work will present the details of the pairwise feedback and evaluation design (Section 3), evaluate these designs (Section 4), and analyze the different reference methods we implemented in the AlpacaFarm (Section 5).
3 Constructing the AlpacaFarm
In this section, we detail how we construct the AlpacaFarm. In Section 4, we then validate our design choices by comparing the LPF workflow with human feedback and evaluation.
3.1 Instruction following data
Before defining the details of how we simulate pairwise feedback, we must first specify a large and diverse set of instructions upon which we can build the rest of AlpacaFarm. We opt to use the Alpaca data (Taori23, ) as a starting point due to its large size (52k examples) and the non-trivial instruction following capabilities of models trained on this data.
We repurpose the Alpaca data into splits suitable for learning from human feedback methods by following a similar data splitting ratio as Ouyang22 . We created four splits (42k in total), leaving 10k for the future:
-
•
Supervised finetuning (SFT) split: 10k data for fine-tuning the base instruction-following LLM used in subsequent steps.
-
•
Pairwise preference (PREF) split: 10k instructions on which we will collect pairwise feedback data.
-
•
Unlabeled split: 20k unlabeled instructions used in algorithms such as PPO.
-
•
Validation split: 2k data for development and tuning.
3.2 Designing simulated pairwise preference
Equipped with the Alpaca instruction data, we now describe the design of our simulated annotator for pairwise preferences. Our core proposal is to design the simulator by prompting OpenAI API LLMs. While using LLMs as a proxy for annotators has become increasingly popular (Chiang23, ; Liu23*a, ), using LLMs as part of a simulation environment poses major additional challenges. Our simulated preferences must not only have a high agreement with human preferences , it must also capture other qualitative aspects of human feedback such as inter- and intra-annotator inconsistencies. Intuitively, the noise and variability in pairwise feedback are key parts of the challenge in the LPF problem and we find that ignoring these factors leads to a simulator that diverges substantially from real-world behavior (Section 4.3).
Basic GPT-4 prompt design.
To start with, we design prompts by providing a guideline of appropriate responses, feeding in-context examples, and leveraging batch generation to save on costs. As a first baseline, we query GPT-4 with a single prompt (denoted as ) and we find has a high agreement rate with human annotators (65%; see results in Section 4.3). However, we find that this simple baseline of fails to capture the variability in human annotation and can lead to qualitatively different results for method development, especially for reward over-optimization (Section 4.3).
Simulating human variability.
To more completely emulate human annotators, we modify the basic simulated annotator design to capture annotator variability in two ways. First, we emulate inter-annotator variability in the simulated pairwise preference by mimicking a pool of annotators. We design different annotators by querying different API LLMs and varying the prompts with different formats, batch sizes, and in-context examples. In the end, we created 13 simulated annotators which we describe fully in Appendix C. Second, we emulate intra-annotator variability by directly injecting random noise and flipping the simulated preference of the time.
With these ingredients, we come up with a simulated preference that meets our requirement of agreement and variability. Overall, annotating 1000 outputs using simulated preference only costs $6, which is 50x cheaper than human annotation. In Section 4, we collect actual human preference and quantitatively verify the agreement and variability of our simulated preference.
3.3 Designing an automatic evaluation
For researchers to develop LPF methods in the AlpacaFarm, we want to support them with an automatic evaluation so they can quickly iterate while reliably comparing methods. To replace the usual human evaluation, there are two challenges. First, how do we quantify the quality of the output of different models? Second, what instructions can we use that are representative of human interactions?
Evaluation protocol.
To quantify the quality of an LLM , we measure the win-rate of that LLM against a reference model, i.e, the expected number of times that the output from is preferred to the output of a reference model on the same instruction . The benefits of using simulated win-rates are that it provides a metric that is easy to understand, is comparable across methods conditioned on a single reference model, and can reuse the routine we built for pairwise feedback. We use the 13 simulated annotators described in Section 3.2 without injecting the additional noise (as adding uniform noise does not change model rankings) and denote this preference simulator as . For the reference model, we use Davinci003 as it is a well-studied system that performs similarly to the models we fine-tune.
Evaluation data.
Instruction following requires diverse coverage over realistic interactions. To build an appropriate evaluation protocol, we combine several open-source evaluation datasets and use real-world interactions with a demo instruction-following LM (Alpaca Demo (Taori23, )) as guidance for constructing our data combination. Due to privacy concerns, we do not directly release the demo data and opt to use it to guide how we combine existing open evaluation datasets.
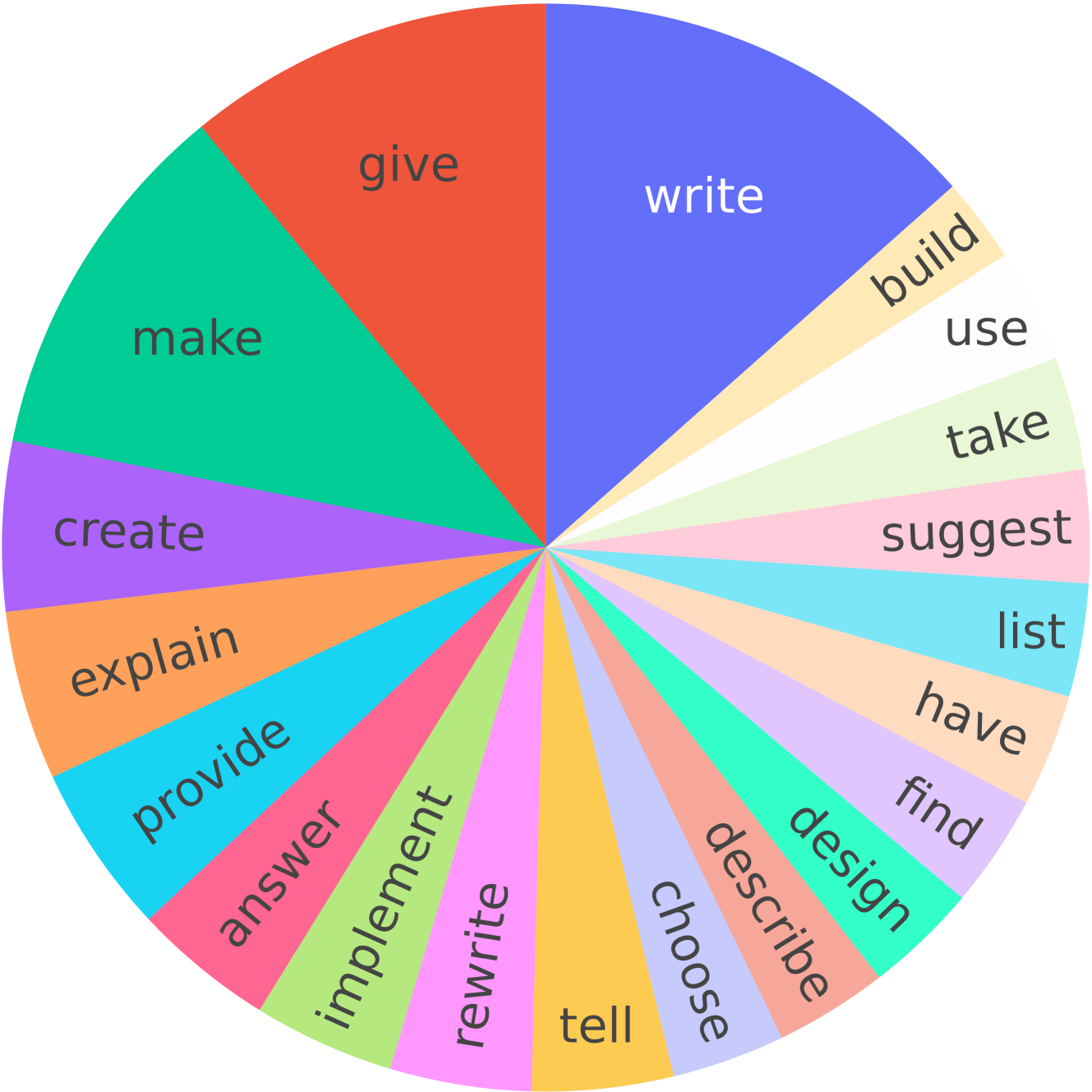
Our final evaluation dataset consists of 805 instructions, which includes 252 instructions from the self-instruct evaluation set (Wang22*b, ), 188 from the Open Assistant (OASST) evaluation, 129 from the helpful evaluation released by Anthropic (Bai22*a, ), 80 from Vicuna evaluation (Chiang23, ), and 156 from Koala evaluation (Geng23, ). In Table 1 and Figure 2, we show example instructions from our evaluation dataset and their root verb distribution, which shows the diverse coverage of our evaluation data. We find that aggregating across datasets is important for automatic evaluation to match real-world interactions, as discussed in Section 4.4.
3.4 Reference methods in AlpacaFarm
Finally, AlpacaFarm defines a collection of validated LPF methods for instruction following. We leave a more detailed methods description to Appendix A and provide a brief overview here. In all LPF methods that follow, we begin by first performing an initial fine-tuning step on supervised data of instructions and outputs.
We begin by describing two simple baselines that directly operate on pairwise feedback.
-
•
Binary FeedME. Binary FeedME (OpenAI*a, ) continues supervised fine-tuning on the preferred output in each pairwise comparison.
-
•
Binary reward conditioning. Reward conditioning (Keskar19, ; Liu23, ; Korbak23, ) is a simple scheme that incorporates learning from negative (non-preferred) examples; a token denoting whether the output was preferred is prepended before fine-tuning, and the positive token is used to condition at inference time.
Many LPF methods do not directly operate on pairwise feedback data, but instead first construct a surrogate reward model by fine-tuning a classifier from the SFT base using pairwise feedback. The following LPF methods maximize the continuous-valued reward defined by the logits of this classifier.
-
•
Best-of- sampling. Best-of- (or re-ranking) (Stiennon20, ; Askell21, ; Glaese22, ; Bakker22, ) is a simple but effective inference-time method that draws i.i.d. responses from the SFT model and returns the response with the highest surrogate reward.
-
•
Expert iteration. Expert iteration (Anthony17, ; Silver17, ; Uesato22, ) is the natural training-time extension of best-of-: it first generates according to best-of- on new instructions and then fine-tunes on the best outputs.
-
•
Proximal Policy Optimization (PPO). PPO (Kakade02, ; Schulman17, ) is a popular reinforcement learning algorithm that maximizes surrogate reward, subject to a KL penalty keeping parameters near SFT initialization.
-
•
Quark. We use the top-quantile variant of Quark Lu22*b which bins sequences by reward and trains on the best bin, along with adding KL and entropy regularization.
4 Validating the AlpacaFarm simulator
With the simulator and methods defined, we can now evaluate AlpacaFarm. As our main result, in Section 4.2 we analyze the correlation between the final rankings of methods in both the simulated LPF workflow and human-based LPF. Afterward, we will analyze the detailed design choices within the simulator by identifying whether our pairwise feedback accurately mimics human pairwise feedback (Section 4.3) and whether rankings on our evaluation data match rankings on the Alpaca Demo data (Section 4.4).
4.1 Experimental details
Models.
As a baseline and starting point for LPF methods, we fine-tuned LLaMA 7B on the 10k SFT split. We take SFT 10k to be the starting point for all LPF methods and collect the simulated preference and human preference from SFT 10k’s outputs (with temp=1.0) on the 10k instruction PREF split.
Then, for each of the six reference LPF methods :
-
•
We trained and tuned on simulated preferences , evaluating the resulting model against the Davinci003 reference with the simulated evaluator .
-
•
We trained a few models on human preferences across hyperparameter ranges identified in simulation, evaluating the resulting model against Davinci003 with humans .
In addition to the six methods, we also evaluate existing standard instruction following and base models: GPT-4 (gpt-4-0314), ChatGPT (gpt-3.5-turbo-0301), Davinci001 (text-davinci-001), LLaMA 7B (Touvron23, ), and Alpaca 7B (Taori23, ). Alpaca 7B is a LLaMA 7B model finetuned on the concatenation of all data splits, denoted SFT 52k. For these models, we measure both the simulated win-rate and human win-rate .
At inference time, for all systems except best-of-, we sample with temp=0.7 and set the maximum number of tokens to be 300. For best-of- sampling, we found a higher temperature to be helpful in encouraging output diversity, and so we rerank samples from SFT 10k with temp=1.0. We provide more thorough experimental details and hyperparameters for all methods in Appendix B.
Human annotation.
We collected reference human annotation by showing crowdworkers two potential outputs or for a given instruction and asked them to select the index of their preferred output. Annotators are recruited from Amazon Mechanical Turk using a qualification test of 25 questions. Out of an initial pool of 34 annotators, we selected the 16 whose agreement rate was higher than 70% with the author’s annotations. We paid the annotators a median hourly rate of $21, leading to a one-time $3000 cost of annotating our PREF split and a recurring $242 cost for evaluating a single model on the 805 evaluation instructions. See Appendix D for additional details including the annotation interface we provided.
4.2 End-to-end validation of AlpacaFarm
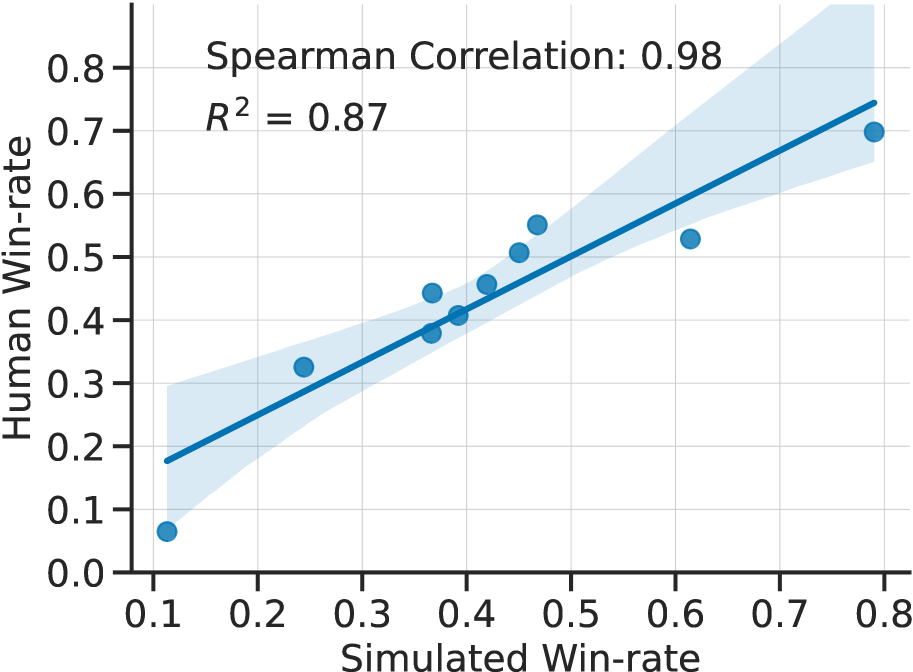
We now analyze the correlation between rankings in simulation and on human data. Figure 3 shows the win-rate of methods in AlpacaFarm (x-axis) with the win-rate from the human-based pipeline (y-axis). We see that the rankings have a Spearman correlation of 0.98, which suggests that AlpacaFarm faithfully captures the rankings among different LPF methods. This enables researchers to develop models in the low-cost AlpacaFarm environment and transfer these insights to train models on real-world human interactions.
Inspecting these results more closely, we point out the two rank mismatches. The first comparison is SFT10k against SFT52k, where human annotators preferred SFT10k (44.3% vs 40.7%) while the simulator had the opposite preference (36.7% vs 39.2%, Table 2). The other mismatch is ChatGPT against PPO, where human annotators preferred PPO (55.1% vs 52.9%) unlike the simulator (46.8% vs 61.4%). In both cases, these are not major mistakes, as we do not expect SFT52k to be much worse than SFT10k or for a 7B LLaMA model to substantially outperform ChatGPT.
4.3 Validating the pairwise preferences component
Having demonstrated that AlpacaFarm succeeds at the end-to-end validation of methods rankings, we now take a closer look at our pairwise preferences, showing that they have a high agreement with human annotators and that they replicate important qualitative features of model training. For additional details see appendix C.



Simulated annotators match human agreement.
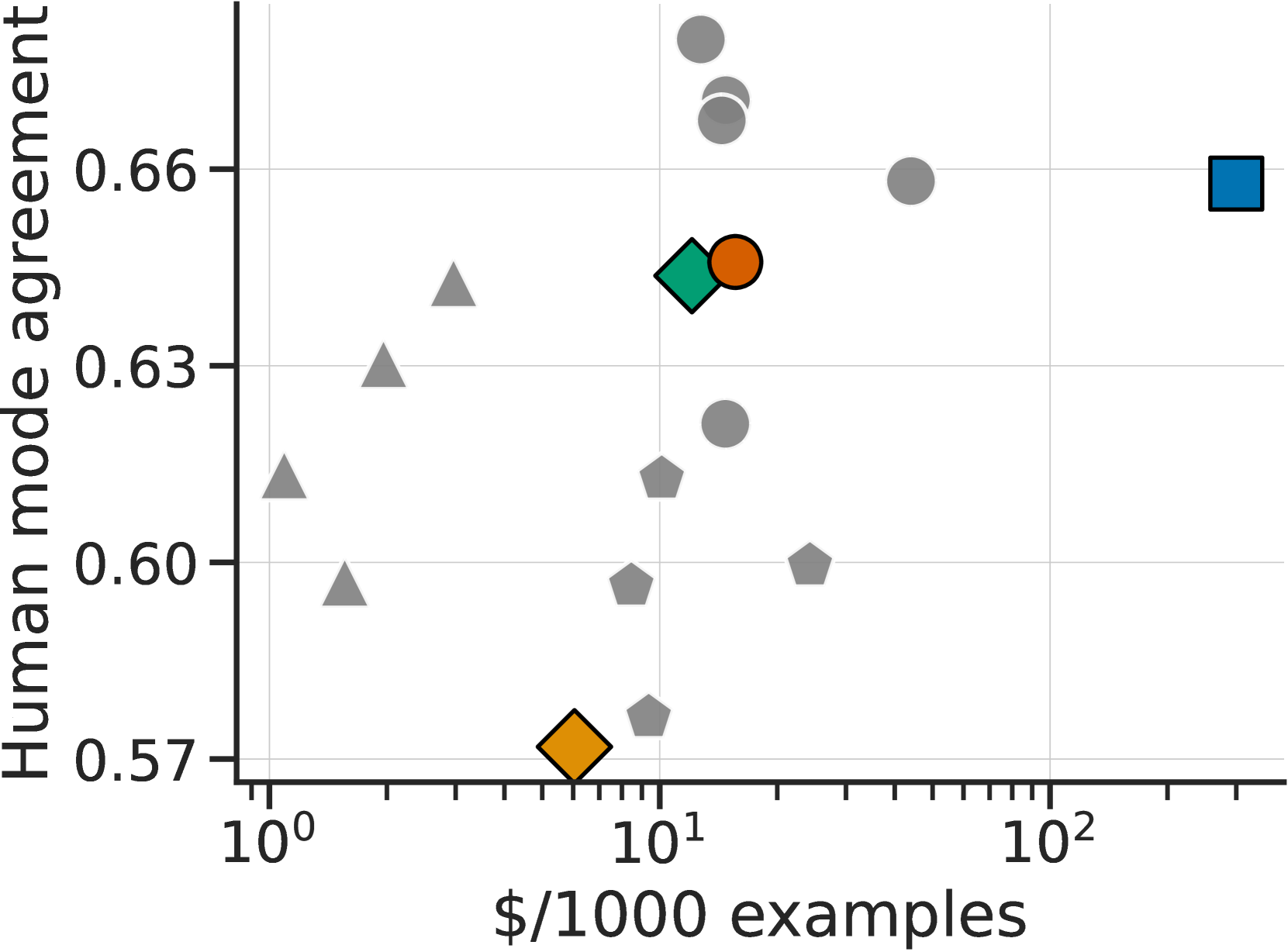
We begin by computing agreement levels between our simulated annotator and a majority vote of 3 human annotators, comparing this to the agreement level of a held-out human annotator, as shown in Figure 4. We find that our evaluator (green) has a 65% agreement rate with the human majority vote, which is similar to the held-out human agreement rate at 66% (blue). At the same time, is cheaper ($300 $12 per 1000 examples). The training time annotator (yellow) has lower agreement due to label flip noise but this does not mean that is less faithful to human annotations, since this noise is unbiased and both annotators (, ) represent the same underlying preference function.
Figure 4 also shows that we identified a few single prompts performing even better than , with one of the GPT-4 prompts achieving 68% agreement. While this high agreement level is impressive, we do not use single prompts directly for AlpacaFarm, as single prompts do not replicate the inter-annotator variability important for a simulator. Instead, randomizing over different annotators and injecting additional noise is needed to match the distributional features and learning dynamics of human data, which we discuss next.
Simulated annotators replicate overoptimization.
We now show that modeling annotator variability in the simulated annotator () is necessary to capture important qualitative features of LPF model training. To do so, we compare the behavior of three of the best-performing models trained under with those trained using the single GPT-4 prompt , which has higher human agreement but little annotator variability.
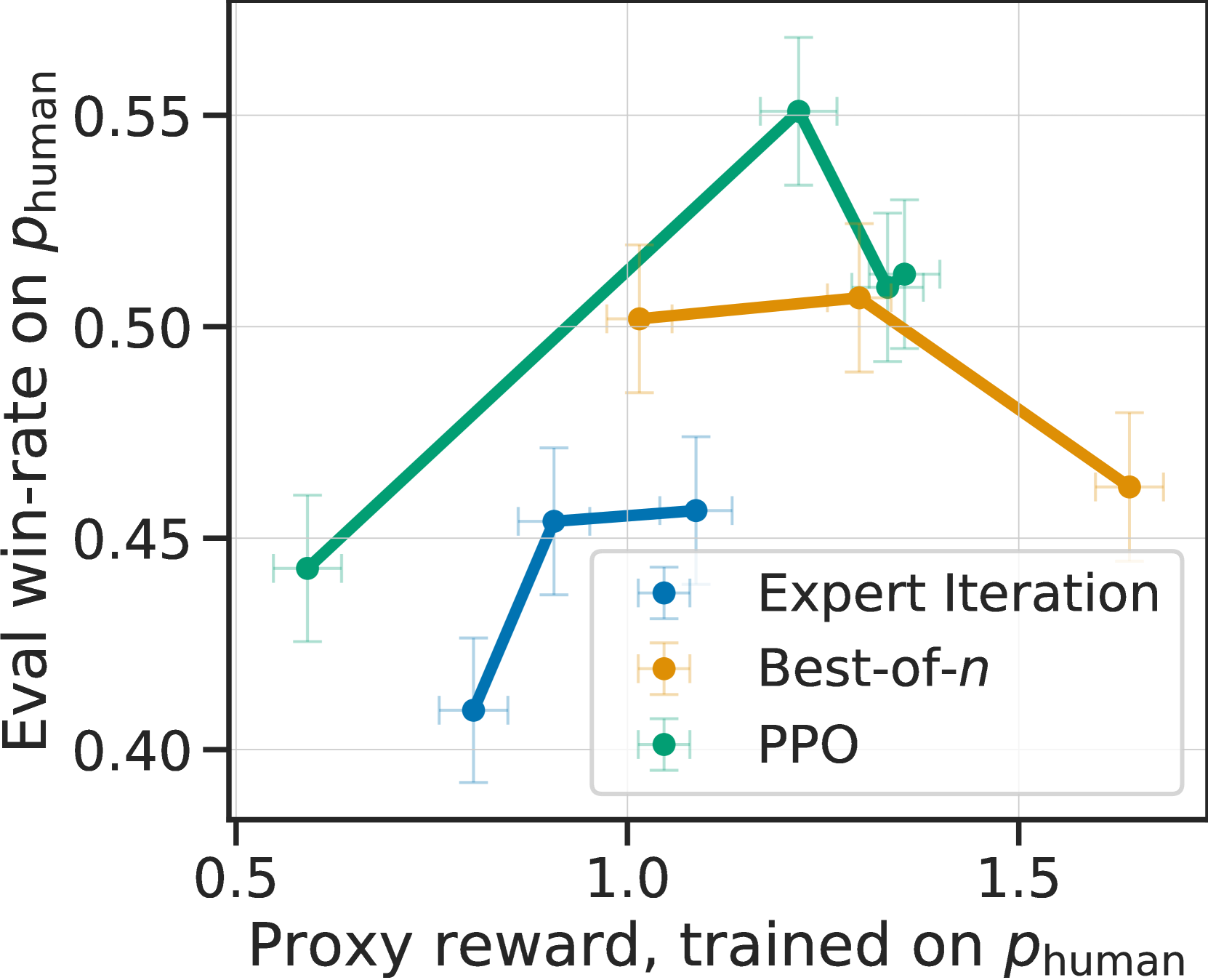
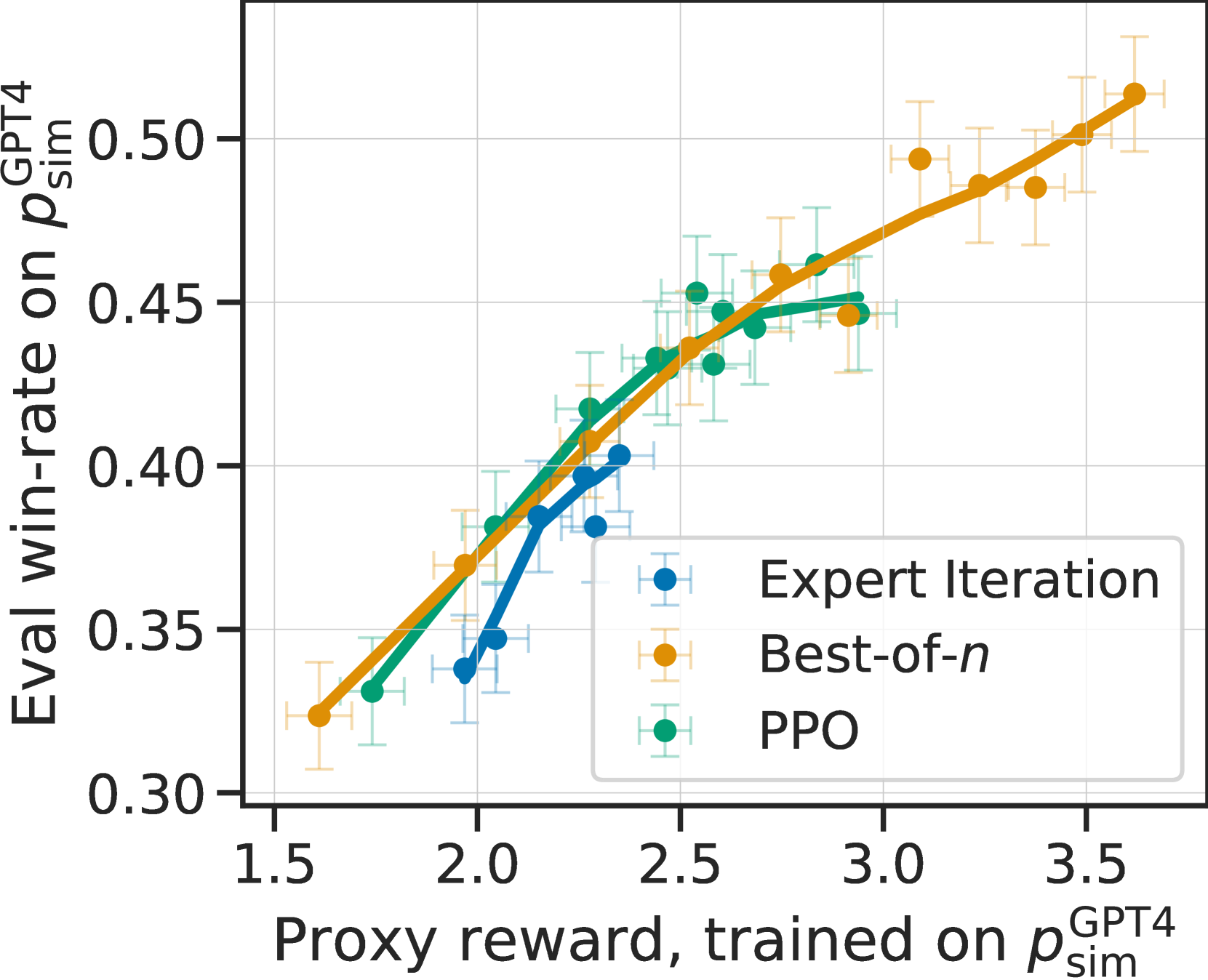
Figure 5(c) shows the learning dynamics of these models for pairwise feedback by (left), (middle), and (right) as the PPO iteration count and rerank sample counts for best-of- and expert iteration are increased. For both the human and AlpacaFarm preferences, models that more effectively optimize the surrogate reward (x-axis) improve in win-rate (y-axis) up until a point, where overoptimization of the reward occurs and win-rates decrease. In contrast, simple GPT-4 feedback shows no overoptimization, leading to the false conclusion that the LPF methods can be optimized for much longer than is actually the case. For example, Figure 5(c) right shows best-of- to be much better than PPO, which disagrees strongly with the results on human data.
Noted in prior work Gao22 , overoptimization is the result of the proxy reward model being an imperfect estimate of the true reward . We hypothesize that the strong overoptimization seen for human annotators is partly due to the (inter- and intra-) variability of their annotations, which degrades the quality of the reward model. To test this hypothesis, we measured the variance of each of the three annotators by calculating the average error of a held-out annotation to the majority vote over 3 random draws. At 0.26 for and 0.43 for , AlpacaFarm is close to the human variance of 0.35; in contrast, the GPT-4 annotator has a much lower variance at 0.1. Finally, in Section E.1 we ablate the AlpacaFarm design more finely and find that the added label noise provides the majority of the benefit for inducing overoptimization. Appendix C contains further analyses of bias and variability of annotators.
4.4 Validating the evaluation protocol
Finally, we test our evaluation data that combines existing open-source evaluation datasets. While we have observed that this dataset is diverse (see Figure 2), it is unclear whether it evaluates performance for any type of real-world human usage. To resolve this, we measure method-level correlations against a set of real user interactions recorded on the Alpaca Demo (Taori23, ). We manually went through the interactions and identified 200 instructions that do not contain any personal identifying information, toxic or unsafe questions, and those that refer to the chatbot directly (e.g. “who are you developed by?”). The terms of use for the demo do not allow us to publicly release this data, but we use this data to evaluate the proposed evaluation set.
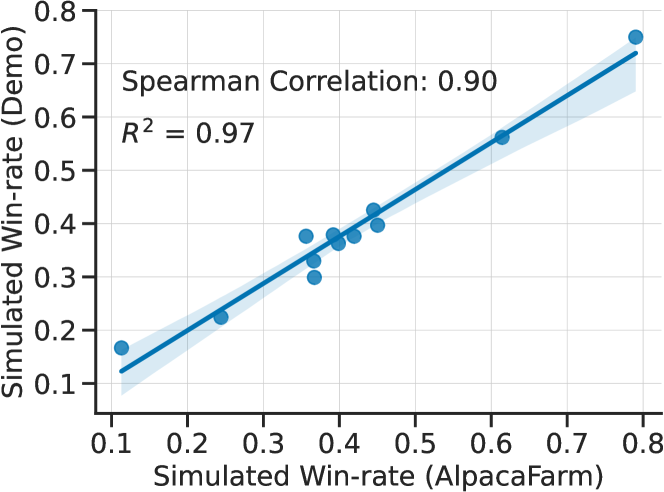
We use the same 11 systems as displayed in Figure 3, with the LPF methods trained in simulation, and evaluate them using . Figure 6 plots the simulated win-rates on the Demo instructions against those on the AlpacaFarm evaluation data. The two win-rates are strongly correlated (), indicating that AlpacaFarm evaluation data can serve as a proxy for evaluating methods on simple demo interactions.
5 Benchmarking reference methods on the AlpacaFarm
| Method | Simulated win-rate (%) | Human win-rate (%) |
|---|---|---|
| GPT-4 | ||
| ChatGPT | ||
| PPO | ||
| Best-of- | ||
| Expert Iteration | ||
| SFT 52k (Alpaca 7B) | ||
| SFT 10k | ||
| Binary FeedME | ||
| Quark | - | |
| Binary Reward Conditioning | - | |
| Davinci001 | ||
| LLaMA 7B |
We now study the performance of reference methods in AlpacaFarm. Table 2 contains the details of the main evaluation results (presented graphically in Figure 3). In the rest of this section, we discuss our findings from these results, demonstrating that the conclusions we reach using human feedback could have been derived using AlpacaFarm at a substantially lower cost.
5.1 Comparing LPF methods
Supervised fine-tuning is highly effective.
Table 2 shows that the SFT step is effective and provides the majority of the win-rate gains. SFT brings the base LLaMA model up from a simulator win-rate of to and a human win-rate of to . However, we observe little to no gain from SFT 10k to SFT 52k.
PPO tops the LPF leaderboard.
Among the LPF methods we study, PPO performs the best in both the simulator () and on human feedback data (). Notably, with a win-rate of , the PPO trained with human feedback was preferred to ChatGPT by our human annotators for single-turn instruction-following.
Best-of- is simple and competitive.
Best-of- sampling outperforms all LPF methods besides PPO. The competitive performance of best-of- sampling points to the useful learning signals captured by the reward model and helps us understand how training-time LPF methods can benefit from a reward model.
Expert Iteration and Quark lag behind.
Even though expert iteration trains with best-of- outputs, it trails best-of- with a 3-6% win-rate gap in both simulated and human feedback workflows. This result suggests that acquiring the improvement from best-of- sampling is not straightforward and points to why more complex learning algorithms like PPO might be useful.
For Quark, we observe that although the rewards of samples improve during training, this did not result in models that perform better than the baseline SFT 10k. See Appendix B for details of our tuning.
Methods that directly learn from pairwise feedback do not perform well.
We observe that binary reward conditioning and binary FeedME do not improve over the SFT 10k baseline. This result suggests that learning a surrogate reward model may be an important ingredient to LPF.
Computational cost.
While our primary focus is the win-rate of LPF methods, we also measured the computational costs of each reference method, generally finding the training process to take hrs for most methods on a single 8A100 machine. The largest computational costs involved decoding a large number of samples for both Best-of- and Expert Iteration (See Section E.2 for details).
5.2 Analysis of model outputs
PPO and best-of- reranking both demonstrate substantial gains with both AlpacaFarm’s simulated feedback and human feedback. While the changes to the win-rate are clear, it is less clear what changes to the model lead to these improvements – are the gains driven by improvements to factuality or reasoning, or are they driven by stylistic differences? We now focus on an analysis of the outputs of these systems to understand what factors contribute to the improvement in their win-rates.
| Instruction: What are the five most common causes of stress among people? | |
|---|---|
|
SFT 10k: The five most common causes of stress among people are work, money, relationships, health, and family. |
PPO: The five most common causes of stress among people are: 1. Pressure at work: Whether it is due to tight deadlines, high expectations, or an overwhelming workload, pressure at work can be a major source of stress. 2. Money problems: Financial issues can be a significant source of stress, from not being able to make ends meet to struggling with debt. 3. Unhealthy lifestyle: Poor diet, lack of exercise, and sleep deprivation can all contribute to stress. 4. Unhappiness at home: Problems in relationships, conflicts with family members, and other domestic issues can be a major source of stress. 5. Uncertainty: Excessive worry and anxiety about the future, health issues, or other unknowns can be a major cause of stress. |
We find a major difference in the length distributions of the outputs, with outputs becoming increasingly longer after applying LPF methods in both human and simulated feedback. For example, the average length of SFT 10k outputs is 278 characters. Best-of- increases the average length to 570 characters and applying PPO increases it to 637 tokens. In Table 3, we show a qualitative example of how PPO training changes the output for an evaluation instruction, with further quantative details and analysis in Section E.3.
5.3 Using AlpacaFarm to train models directly for human deployment
The main goal of AlpacaFarm is to provide a simulator to enable the development of methods that would then be trained on human feedback before deployment. A natural question is whether one can use AlpacaFarm to train models on simulated preferences that directly perform well on human evaluation, without having to retrain on human preferences. We show that AlpacaFarm can be repurposed for this goal once the pairwise feedback simulator is modified to maximize agreement rather than match human annotator variability.
To illustrate this point, we compare the best PPO model (step 40) trained in AlpacaFarm with a matched PPO model (step ) trained on the single low-variance GPT-4 annotator . We then measure their win-rate according to human preference evaluation, . The results are displayed in Table 4.
| Method | Human Win-rate (%) |
|---|---|
| 55% | |
| 51% | |
| 50% | |
| SFT 10k | 44% |
| 43% |
We find that trained in AlpacaFarm only achieves a win-rate of 43%, while trained on GPT-4 data achieves a win-rate of 50%. To contextualize these results, the initial SFT model has a win-rate of 44%, has a win-rate of 55%, and the best non-PPO human method has a win-rate of 51% (Best-of-). Thus, training in simulation can provide good models directly for deployment, though this approach suffers a 5% performance gap relative to collecting real human annotations.
These results demonstrate a faithfulness-performance tradeoff in simulator design: more faithful simulators, which display greater over-optimization, train objectively worse models. The standard AlpacaFarm pairwise evaluators are best suited for developing new methods and performing method selection in the simulator, as Figure 3 demonstrates that the ranking of methods remains the same when they are re-trained on human preferences. However, for directly deploying models trained in the simulator, a single consistent annotator such as can provide significant gains on real-world evaluation.
6 Related work
Instruction following.
There have been an number of works studying instruction following as a cross-task generalization across a pool of NLP tasks Mishra21 ; Wei21 ; Sanh21 ; Aribandi21 ; Wang22*b . Our work focuses on a recent trend in instruction following methods which increasingly focus on real world human interaction patterns Ouyang22 ; Bai22*a , rather than collections of existing NLP benchmarks. For example, InstructGPT was developed on user instructions submitted to OpenAI API Ouyang22 . Our work builds upon these works by attempting to bridge the gap between the ease of development and evaluation of traditional academic benchmarks and the more complex algorithms and real-world settings of recent works on instruction following.
Simulating human feedback.
Constitutional AI Bai22 simulates human feedback with AI feedback for model development to improve harmlessness and helpfulness. AlpacaFarm, on the other hand, simulates human feedback with API LLMs so that simulated experiments reflect the outcomes of experiments performed with real human feedback. Due to the difference in goals, the construction and usage of the feedback simulator are different in the two settings. For example, AlpacaFarm’s simulator perturbs LLM preferences with bit-flip label noise to mimic the noisiness of human annotation, whereas Constitutional AI’s simulator doesn’t inject extra noise.
The evaluation aspects of our work are related to a growing line of work on simulating human annotation for evaluation Chiang23 ; Perez22 ; Chiang23 ; Peng23 ; Liu23*b ; Liu23*a . Our core evaluation and feedback mechanism makes use of the same underlying ideas, but our work is distinguished by a focus on using pairwise feedback for training, as well as careful validation beyond per-example agreement metrics. AlpacaFarm shows that LLM feedback can capture method-level correlations as well as qualitatively important features of human annotation for phenomena such as overoptimization.
Our goal of emulating human annotators also connects to work on simulating humans with LMs based on personas Park22 ; Park23 ; Aher22 ; Argyle22 , as well as works that simulate human behavior in the context of cognitive science, social science, and economics Uchendu21 ; Karra22 . Our work complements these works by showing that simulated LLM annotators can replicate many of the qualitative features of training on pairwise human feedback.
More broadly, building a simulator environment to enable low-cost experimentation is common in the field of reinforcement learning and robotics Brockman16 ; Todorov12 ; Tassa18 ; Summers20 ; Fan18 ; Juliani18 ; Freeman21 . Our work shares the same underlying motivations, but instead of simulating physical systems, AlpacaFarm simulates human preference feedback.
Methods for learning from feedback.
To hold annotation cost constant across learning methods, we have focused only on methods that learn from pairwise feedback in this work. However, there exist methods in the literature other than those explored in AlpacaFarm that can incorporate alternative sources of feedback such as natural language Weston16 ; Li16*f ; Hancock19 ; Shi22 ; Saunders22 ; Chen23 ; Scheurer23 ; Madaan23 , numeric ratings OpenAI*a ; Lee23 , or execution traces Chen23 . We view extensions of AlpacaFarm to these settings as exciting future work.
We have included a set of RL algorithms in our study that optimize the surrogate reward, but this set is by no means comprehensive. RL research applied to NLP has a long history Wu16 ; Sokolov16 ; Kiegeland21 ; Paulus17 ; Nguyen17 ; Lam18 ; Kreutzer18 ; Ramamurthy22 ; Snell22 , and we expect future work in this direction to benefit from the ideas and artifacts in AlpacaFarm.
7 Limitations and future directions
Difference between GPT4 and human feedback.
Our sandbox assumes that LLMs can simulate human feedback. Section 4 shows that this assumption holds in the sense that LLM annotations align with the mode of human preferences and replicate its many features. However, we also observe that no single LLM-based annotator captures the heterogeneity of human annotation, and substantial amounts of noise had to be injected in the simulated preference for rankings of methods trained in AlpacaFarm to match those trained with real human feedback.
In addition, we found that suitable hyperparameters for learning algorithms can be different for training with simulated feedback compared to human feedback. For example, due to changes in the scale of values of the surrogate reward model, the range of suitable KL regularization coefficients for RLHF is different. This suggests that the AlpacaFarm simulator, as it currently is, would not always be suitable to aid hyperparameter tuning to improve performance on human evaluation.
Finally, we note that our preference simulator is validated with respect to our recruited pool of crowdworkers, and mimics their preference variability as a result. The best prompts for transferring insights to other, more consistent crowdworker pools may involve lower levels of noise or a smaller prompt ensemble.
Limitation in current experiments.
Due to resource constraints (both compute and human annotation), we have not conducted extensive hyperparameter tuning for the methods we studied in Section A. For each method, we have performed at least 3 tuning runs, and we detail our tuning process in Appendix B. It is possible that with more careful tuning, the comparison between PPO and alternative approaches like expert iteration and Quark might change.
In addition, our experiments were conducted with models and datasets of a particular scale. Qualitative findings may change as we move to larger models or datasets.
Our study focuses on comparisons of methods that learn from pairwise feedback. We do not study other forms of feedback, such as numerical ratings or natural language. Neither do we study quality-quantity tradeoffs for learning from pairwise feedback. We leave this exposition to future work.
Future directions.
We showed that AlpacaFarm substantially lowers the cost and iteration time of research on and development of methods for learning with pairwise feedback. AlpacaFarm provides a blueprint for constructing other useful simulators for AI research that requires human supervision, and we view it as an exciting opportunity to expand this simulation approach to support data from other domains as well as methods that learn from alternative forms of human feedback.
Acknowledgments and Disclosure of Funding
We thank the Stanford Center for Research on Foundation Models (CRFM), Stanford HAI, and Stability AI for compute support. Data collection efforts were supported through the Tianqiao & Chrissy Chen Institute and an Open Philanthropy grant. XL is supported by a Stanford Graduate Fellowship. RT is supported by the NSF GRFP under Grant No. DGE 1656518. YD is supported by a Knights-Hennessy Scholarship.
References
- [1] Gati Aher, Rosa I Arriaga, and Adam Tauman Kalai. Using large language models to simulate multiple humans. arXiv preprint arXiv:2208.10264, 2022.
- [2] Thomas Anthony, Zheng Tian, and David Barber. Thinking fast and slow with deep learning and tree search. Advances in neural information processing systems, 30, 2017.
- [3] Lisa P Argyle, Ethan C Busby, Nancy Fulda, Joshua Gubler, Christopher Rytting, and David Wingate. Out of one, many: Using language models to simulate human samples. arXiv preprint arXiv:2209.06899, 2022.
- [4] Vamsi Aribandi, Yi Tay, Tal Schuster, Jinfeng Rao, Huaixiu Steven Zheng, Sanket Vaibhav Mehta, Honglei Zhuang, Vinh Q Tran, Dara Bahri, Jianmo Ni, et al. Ext5: Towards extreme multi-task scaling for transfer learning. arXiv preprint arXiv:2111.10952, 2021.
- [5] Amanda Askell, Yuntao Bai, Anna Chen, Dawn Drain, Deep Ganguli, Tom Henighan, Andy Jones, Nicholas Joseph, Ben Mann, Nova DasSarma, Nelson Elhage, Zac Hatfield-Dodds, Danny Hernandez, Jackson Kernion, Kamal Ndousse, Catherine Olsson, Dario Amodei, Tom Brown, Jack Clark, Sam McCandlish, Chris Olah, and Jared Kaplan. A general language assistant as a laboratory for alignment, 2021.
- [6] Yuntao Bai, Andy Jones, Kamal Ndousse, Amanda Askell, Anna Chen, Nova DasSarma, Dawn Drain, Stanislav Fort, Deep Ganguli, Tom Henighan, Nicholas Joseph, Saurav Kadavath, Jackson Kernion, Tom Conerly, Sheer El-Showk, Nelson Elhage, Zac Hatfield-Dodds, Danny Hernandez, Tristan Hume, Scott Johnston, Shauna Kravec, Liane Lovitt, Neel Nanda, Catherine Olsson, Dario Amodei, Tom Brown, Jack Clark, Sam McCandlish, Chris Olah, Ben Mann, and Jared Kaplan. Training a helpful and harmless assistant with reinforcement learning from human feedback, 2022.
- [7] Yuntao Bai, Saurav Kadavath, Sandipan Kundu, Amanda Askell, Jackson Kernion, Andy Jones, Anna Chen, Anna Goldie, Azalia Mirhoseini, Cameron McKinnon, et al. Constitutional ai: Harmlessness from ai feedback. arXiv preprint arXiv:2212.08073, 2022.
- [8] Michiel Bakker, Martin Chadwick, Hannah Sheahan, Michael Tessler, Lucy Campbell-Gillingham, Jan Balaguer, Nat McAleese, Amelia Glaese, John Aslanides, Matt Botvinick, et al. Fine-tuning language models to find agreement among humans with diverse preferences. Advances in Neural Information Processing Systems, 35:38176–38189, 2022.
- [9] R. Bommasani et al. On the opportunities and risks of foundation models. arXiv preprint arXiv:2108.07258, 2021.
- [10] Ralph Allan Bradley and Milton E Terry. Rank analysis of incomplete block designs: I. the method of paired comparisons. Biometrika, 39(3/4):324–345, 1952.
- [11] Greg Brockman, Vicki Cheung, Ludwig Pettersson, Jonas Schneider, John Schulman, Jie Tang, and Wojciech Zaremba. Openai gym. arXiv preprint arXiv:1606.01540, 2016.
- [12] T. B. Brown, B. Mann, N. Ryder, M. Subbiah, J. Kaplan, P. Dhariwal, A. Neelakantan, P. Shyam, G. Sastry, A. Askell, S. Agarwal, A. Herbert-Voss, G. Krueger, T. Henighan, R. Child, A. Ramesh, D. M. Ziegler, J. Wu, C. Winter, C. Hesse, M. Chen, E. Sigler, M. Litwin, S. Gray, B. Chess, J. Clark, C. Berner, S. McCandlish, A. Radford, I. Sutskever, and D. Amodei. Language models are few-shot learners. In Advances in Neural Information Processing Systems (NeurIPS), 2020.
- [13] Angelica Chen, Jérémy Scheurer, Tomasz Korbak, Jon Ander Campos, Jun Shern Chan, Samuel R Bowman, Kyunghyun Cho, and Ethan Perez. Improving code generation by training with natural language feedback. arXiv preprint arXiv:2303.16749, 2023.
- [14] Cheng-Han Chiang and Hung-yi Lee. Can large language models be an alternative to human evaluations? arXiv preprint arXiv:2305.01937, 2023.
- [15] Paul F Christiano, Jan Leike, Tom Brown, Miljan Martic, Shane Legg, and Dario Amodei. Deep reinforcement learning from human preferences. Advances in neural information processing systems, 30, 2017.
- [16] Linxi Fan, Yuke Zhu, Jiren Zhu, Zihua Liu, Orien Zeng, Anchit Gupta, Joan Creus-Costa, Silvio Savarese, and Li Fei-Fei. Surreal: Open-source reinforcement learning framework and robot manipulation benchmark. In Conference on Robot Learning, pages 767–782. PMLR, 2018.
- [17] C Daniel Freeman, Erik Frey, Anton Raichuk, Sertan Girgin, Igor Mordatch, and Olivier Bachem. Brax–a differentiable physics engine for large scale rigid body simulation. arXiv preprint arXiv:2106.13281, 2021.
- [18] Leo Gao, John Schulman, and Jacob Hilton. Scaling laws for reward model overoptimization. arXiv preprint arXiv:2210.10760, 2022.
- [19] Xinyang Geng, Arnav Gudibande, Hao Liu, Eric Wallace, Pieter Abbeel, Sergey Levine, and Dawn Song. Koala: A dialogue model for academic research, March 2023.
- [20] Amelia Glaese, Nat McAleese, Maja Trębacz, John Aslanides, Vlad Firoiu, Timo Ewalds, Maribeth Rauh, Laura Weidinger, Martin Chadwick, Phoebe Thacker, et al. Improving alignment of dialogue agents via targeted human judgements. arXiv preprint arXiv:2209.14375, 2022.
- [21] Braden Hancock, Antoine Bordes, Pierre-Emmanuel Mazare, and Jason Weston. Learning from dialogue after deployment: Feed yourself, chatbot! arXiv preprint arXiv:1901.05415, 2019.
- [22] Arthur Juliani, Vincent-Pierre Berges, Ervin Teng, Andrew Cohen, Jonathan Harper, Chris Elion, Chris Goy, Yuan Gao, Hunter Henry, Marwan Mattar, et al. Unity: A general platform for intelligent agents. arXiv preprint arXiv:1809.02627, 2018.
- [23] S. Kakade, Y. W. Teh, and S. Roweis. An alternate objective function for Markovian fields. In International Conference on Machine Learning (ICML), 2002.
- [24] Saketh Reddy Karra, Son Nguyen, and Theja Tulabandhula. Ai personification: Estimating the personality of language models. arXiv preprint arXiv:2204.12000, 2022.
- [25] N. S. Keskar, B. McCann, L. R. Varshney, C. Xiong, and R. Socher. CTRL: A Conditional Transformer Language Model for Controllable Generation. arXiv preprint arXiv:1909.05858, 2019.
- [26] Samuel Kiegeland and Julia Kreutzer. Revisiting the weaknesses of reinforcement learning for neural machine translation. arXiv preprint arXiv:2106.08942, 2021.
- [27] Tomasz Korbak, Kejian Shi, Angelica Chen, Rasika Bhalerao, Christopher L Buckley, Jason Phang, Samuel R Bowman, and Ethan Perez. Pretraining language models with human preferences. arXiv preprint arXiv:2302.08582, 2023.
- [28] Julia Kreutzer, Shahram Khadivi, Evgeny Matusov, and Stefan Riezler. Can neural machine translation be improved with user feedback? arXiv preprint arXiv:1804.05958, 2018.
- [29] Tsz Kin Lam, Julia Kreutzer, and Stefan Riezler. A reinforcement learning approach to interactive-predictive neural machine translation. arXiv preprint arXiv:1805.01553, 2018.
- [30] Kimin Lee, Hao Liu, Moonkyung Ryu, Olivia Watkins, Yuqing Du, Craig Boutilier, Pieter Abbeel, Mohammad Ghavamzadeh, and Shixiang Shane Gu. Aligning text-to-image models using human feedback. arXiv preprint arXiv:2302.12192, 2023.
- [31] Jiwei Li, Alexander H Miller, Sumit Chopra, Marc’Aurelio Ranzato, and Jason Weston. Dialogue learning with human-in-the-loop. arXiv preprint arXiv:1611.09823, 2016.
- [32] H Liu, C Sferrazza, and P Abbeel. Chain of hindsight aligns language models with feedback. arXiv preprint arXiv:2302.02676, 2023.
- [33] Haotian Liu, Chunyuan Li, Qingyang Wu, and Yong Jae Lee. Visual instruction tuning. arXiv preprint arXiv:2304.08485, 2023.
- [34] Yang Liu, Dan Iter, Xu Yichong, Wang Shuohang, Xu Ruochen, and Chenguang Zhu. G-eval: Nlg evaluation using gpt-4 with better human alignmentg. arXiv preprint arXiv:2303.16634, 2023.
- [35] Shayne Longpre, Le Hou, Tu Vu, Albert Webson, Hyung Won Chung, Yi Tay, Denny Zhou, Quoc V Le, Barret Zoph, Jason Wei, et al. The flan collection: Designing data and methods for effective instruction tuning. arXiv preprint arXiv:2301.13688, 2023.
- [36] X. Lu, S. Welleck, J. Hessel, L. Jiang, L. Qin, P. West, P. Ammanabrolu, and Y. Choi. Quark: Controllable text generation with reinforced unlearning. In Advances in Neural Information Processing Systems, 2022.
- [37] Ximing Lu, Sean Welleck, Jack Hessel, Liwei Jiang, Lianhui Qin, Peter West, Prithviraj Ammanabrolu, and Yejin Choi. Quark: Controllable text generation with reinforced unlearning. Advances in neural information processing systems, 35:27591–27609, 2022.
- [38] Aman Madaan, Niket Tandon, Prakhar Gupta, Skyler Hallinan, Luyu Gao, Sarah Wiegreffe, Uri Alon, Nouha Dziri, Shrimai Prabhumoye, Yiming Yang, et al. Self-refine: Iterative refinement with self-feedback. arXiv preprint arXiv:2303.17651, 2023.
- [39] Swaroop Mishra, Daniel Khashabi, Chitta Baral, and Hannaneh Hajishirzi. Cross-task generalization via natural language crowdsourcing instructions. arXiv preprint arXiv:2104.08773, 2021.
- [40] Khanh Nguyen, Hal Daumé III, and Jordan Boyd-Graber. Reinforcement learning for bandit neural machine translation with simulated human feedback. arXiv preprint arXiv:1707.07402, 2017.
- [41] OpenAI. Introducing chatgpt.
- [42] OpenAI. Model index for researchers.
- [43] OpenAI. Gpt-4 technical report, 2023.
- [44] Long Ouyang, Jeff Wu, Xu Jiang, Diogo Almeida, Carroll L. Wainwright, Pamela Mishkin, Chong Zhang, Sandhini Agarwal, Katarina Slama, Alex Ray, John Schulman, Jacob Hilton, Fraser Kelton, Luke Miller, Maddie Simens, Amanda Askell, Peter Welinder, Paul Christiano, Jan Leike, and Ryan Lowe. Training language models to follow instructions with human feedback, 2022.
- [45] Joon Sung Park, Joseph C O’Brien, Carrie J Cai, Meredith Ringel Morris, Percy Liang, and Michael S Bernstein. Generative agents: Interactive simulacra of human behavior. arXiv preprint arXiv:2304.03442, 2023.
- [46] Joon Sung Park, Lindsay Popowski, Carrie Cai, Meredith Ringel Morris, Percy Liang, and Michael S Bernstein. Social simulacra: Creating populated prototypes for social computing systems. In Proceedings of the 35th Annual ACM Symposium on User Interface Software and Technology, pages 1–18, 2022.
- [47] Romain Paulus, Caiming Xiong, and Richard Socher. A deep reinforced model for abstractive summarization. arXiv preprint arXiv:1705.04304, 2017.
- [48] Baolin Peng, Chunyuan Li, Pengcheng He, Michel Galley, and Jianfeng Gao. Instruction tuning with gpt-4. arXiv preprint arXiv:2304.03277, 2023.
- [49] Ethan Perez, Sam Ringer, Kamilė Lukošiūtė, Karina Nguyen, Edwin Chen, Scott Heiner, Craig Pettit, Catherine Olsson, Sandipan Kundu, Saurav Kadavath, et al. Discovering language model behaviors with model-written evaluations. arXiv preprint arXiv:2212.09251, 2022.
- [50] Rajkumar Ramamurthy, Prithviraj Ammanabrolu, Kianté Brantley, Jack Hessel, Rafet Sifa, Christian Bauckhage, Hannaneh Hajishirzi, and Yejin Choi. Is reinforcement learning (not) for natural language processing?: Benchmarks, baselines, and building blocks for natural language policy optimization. arXiv preprint arXiv:2210.01241, 2022.
- [51] Victor Sanh, Albert Webson, Colin Raffel, Stephen H Bach, Lintang Sutawika, Zaid Alyafeai, Antoine Chaffin, Arnaud Stiegler, Teven Le Scao, Arun Raja, et al. Multitask prompted training enables zero-shot task generalization. arXiv preprint arXiv:2110.08207, 2021.
- [52] William Saunders, Catherine Yeh, Jeff Wu, Steven Bills, Long Ouyang, Jonathan Ward, and Jan Leike. Self-critiquing models for assisting human evaluators. arXiv preprint arXiv:2206.05802, 2022.
- [53] Jérémy Scheurer, Jon Ander Campos, Tomasz Korbak, Jun Shern Chan, Angelica Chen, Kyunghyun Cho, and Ethan Perez. Training language models with language feedback at scale. arXiv preprint arXiv:2303.16755, 2023.
- [54] John Schulman, Philipp Moritz, Sergey Levine, Michael Jordan, and Pieter Abbeel. High-dimensional continuous control using generalized advantage estimation. arXiv preprint arXiv:1506.02438, 2015.
- [55] John Schulman, Filip Wolski, Prafulla Dhariwal, Alec Radford, and Oleg Klimov. Proximal policy optimization algorithms, 2017.
- [56] Weiyan Shi, Emily Dinan, Kurt Shuster, Jason Weston, and Jing Xu. When life gives you lemons, make cherryade: Converting feedback from bad responses into good labels. arXiv preprint arXiv:2210.15893, 2022.
- [57] D. Silver, J. Schrittwieser, K. Simonyan, I. Antonoglou, A. Huang, A. Guez, T. Hubert, L., M. Lai, A. Bolton, et al. Mastering the game of go without human knowledge. Nature, 550(7676):354–359, 2017.
- [58] Charlie Snell, Ilya Kostrikov, Yi Su, Mengjiao Yang, and Sergey Levine. Offline rl for natural language generation with implicit language q learning. arXiv preprint arXiv:2206.11871, 2022.
- [59] Artem Sokolov, Stefan Riezler, and Tanguy Urvoy. Bandit structured prediction for learning from partial feedback in statistical machine translation. arXiv preprint arXiv:1601.04468, 2016.
- [60] Nisan Stiennon, Long Ouyang, Jeff Wu, Daniel M. Ziegler, Ryan Lowe, Chelsea Voss, Alec Radford, Dario Amodei, and Paul Christiano. Learning to summarize from human feedback, 2020.
- [61] Colin Summers, Kendall Lowrey, Aravind Rajeswaran, Siddhartha Srinivasa, and Emanuel Todorov. Lyceum: An efficient and scalable ecosystem for robot learning. In Learning for Dynamics and Control, pages 793–803. PMLR, 2020.
- [62] Rohan Taori, Ishaan Gulrajani, Tianyi Zhang, Yann Dubois, Xuechen Li, Carlos Guestrin, Percy Liang, and Tatsunori B. Hashimoto. Alpaca: A strong, replicable instruction-following modely, March 2023.
- [63] Yuval Tassa, Yotam Doron, Alistair Muldal, Tom Erez, Yazhe Li, Diego de Las Casas, David Budden, Abbas Abdolmaleki, Josh Merel, Andrew Lefrancq, et al. Deepmind control suite. arXiv preprint arXiv:1801.00690, 2018.
- [64] Emanuel Todorov, Tom Erez, and Yuval Tassa. Mujoco: A physics engine for model-based control. In 2012 IEEE/RSJ international conference on intelligent robots and systems, pages 5026–5033. IEEE, 2012.
- [65] Hugo Touvron, Thibaut Lavril, Gautier Izacard, Xavier Martinet, Marie-Anne Lachaux, Timothée Lacroix, Baptiste Rozière, Naman Goyal, Eric Hambro, Faisal Azhar, et al. Llama: Open and efficient foundation language models. arXiv preprint arXiv:2302.13971, 2023.
- [66] Adaku Uchendu, Zeyu Ma, Thai Le, Rui Zhang, and Dongwon Lee. Turingbench: A benchmark environment for turing test in the age of neural text generation. arXiv preprint arXiv:2109.13296, 2021.
- [67] Jonathan Uesato, Nate Kushman, Ramana Kumar, Francis Song, Noah Siegel, Lisa Wang, Antonia Creswell, Geoffrey Irving, and Irina Higgins. Solving math word problems with process- and outcome-based feedback, 2022.
- [68] Yizhong Wang, Swaroop Mishra, Pegah Alipoormolabashi, Yeganeh Kordi, Amirreza Mirzaei, Atharva Naik, Arjun Ashok, Arut Selvan Dhanasekaran, Anjana Arunkumar, David Stap, et al. Super-naturalinstructions: Generalization via declarative instructions on 1600+ nlp tasks. In Proceedings of the 2022 Conference on Empirical Methods in Natural Language Processing, pages 5085–5109, 2022.
- [69] Jason Wei, Maarten Bosma, Vincent Y Zhao, Kelvin Guu, Adams Wei Yu, Brian Lester, Nan Du, Andrew M Dai, and Quoc V Le. Finetuned language models are zero-shot learners. arXiv preprint arXiv:2109.01652, 2021.
- [70] J. E. Weston. Dialog-based language learning. In Advances in Neural Information Processing Systems (NeurIPS), pages 829–837, 2016.
- [71] Y. Wu, M. Schuster, Z. Chen, Q. V. Le, M. Norouzi, W. Macherey, M. Krikun, Y. Cao, Q. Gao, K. Macherey, et al. Google’s neural machine translation system: Bridging the gap between human and machine translation. arXiv preprint arXiv:1609.08144, 2016.
Appendix A Reference LPF methods on AlpacaFarm
We provide a more thorough description of the methods in AlpacaFarm along with the custom modifications we make. For more on hyper-parameter tuning, experiment details, and further ablations, please see Appendix B.
Our methods fall into two categories based on whether they fit a surrogate reward model as part of the learning process.
A.1 Methods that directly learn from pairwise feedback
Binary FeedME.
FeedME is a method proposed by OpenAI [42] that incorporates human feedback with supervised fine-tuning on model generations that are rated 7/7 by human labelers. We adapt this approach to the pairwise feedback setting and call this baseline binary FeedME. This approach fine-tunes the SFT model on the chosen response in each preference pair with supervised learning.
Binary Reward Conditioning.
Motivated by controllable generation through conditioning [25, 32, 27, 19], we propose binary reward conditioning, a baseline method that fine-tunes the SFT model with the feedback data by conditioning instances with either a positive or negative control token. Specifically, for each instance , the string concatenation of instruction and response denoted as is prepended with the positive token and used in supervised fine-tuning (similarly is prepended with the negative token). This process creates a modified demonstration dataset that is double the size of . At test time, we draw samples from the fine-tuned model conditioned on the positive token.
A.2 Methods that optimize a surrogate reward function
We now describe methods that incorporate feedback by first building a surrogate reward model with pairwise feedback data. To start, we describe the step of training the surrogate reward model.
To train a parameterized surrogate , one can maximize the log-likelihood of the preferences under the Bradley-Terry model [10]
| (1) |
Once the surrogate reward model is trained, both training and inference algorithms can optimize against the reward model rather than query pairwise feedback. While this can be a powerful approach, we will see that it can also lead to over-optimization [18] where models learn to exploit the reward model rather than achieve high true reward. We now describe 4 methods that leverage the surrogate reward model.
Best-of- Sampling.
Best-of- sampling (or re-ranking) [60, 5, 20, 8] is a common inference-time method that aims to improve the generation quality. Given an input , the method returns the response with the highest surrogate reward value among i.i.d. responses drawn from the SFT model. While simple to implement and useful as a baseline, this approach incurs high inference costs.
Expert Iteration.
Expert iteration [2, 57, 67] is a technique that has recently been used to train language models. We adapt this approach in AlpacaFarm as a two-step method. In the first step, we perform best-of- sampling and store the generated samples. In the second step, we fine-tune on these samples with supervised learning. While prior work applies expert iteration for multiple rounds by performing best-of- sampling again for intermediate models, we focus on performing a single round. In Appendix B, we include our preliminary study of multi-round expert iteration.
Proximal Policy Optimization.
Proximal Policy Optimization [PPO; 23, 55] is a popular RL algorithm that has been recently used to develop InstructGPT [44] and ChatGPT [41]. When applied to fine-tune LMs with RLHF, PPO maximizes the following KL-regularized objective w.r.t. model parameters
| (2) |
where is an unlabeled instruction distribution, is fine-tuned from the model, and is a regularization coefficient. Each step of PPO alternates between drawing samples from the current policy and performing gradient updates based on the pool of samples with importance sampling and clipping.
Quark.
Quark is inspired by reward conditioning and has been shown to be effective for controllable generation tasks. Like binary reward conditioning, Quark on train sequences with prepended control tokens. Unlike binary reward conditioning, Quark bins model samples into multiple groups based on the reward value, adds KL and entropy regularization, and repeats the entire process across multiple rounds.
In our preliminary analysis, we find the top-quantile variant reported in [36], i.e. only training on the best reward group, to perform the better than the all-quantiles variant which trains on all groups.
Appendix B Details on methods implementation and hyperparameters
B.1 PPO
We follow an existing PPO implementation for fine-tuning language models,111https://github.com/openai/lm-human-preferences but also introduce modifications. First, off-the-shelf PPO implementations for language model fine-tuning tend to normalize the estimated advantage for each minibatch. We found this led to training instabilities for small minibatch sizes and instead normalize the advantage across the entire batch of rollouts obtained for each PPO step. Second, we initialize the value model from the reward model as opposed to the SFT model, following more recent documented practice [44] (the authors did not release code). Our preliminary experiments showed that initializing from reward worked much better than initializing from SFT for maximizing the surrogate reward.
We tuned hyperparameters to improve training stability and reduce convergence time so that experiments can reliably finish with relatively tight compute budgets. In the end, we settled on a batch size of 512 for each PPO step, which consisted of 2 epochs of gradient steps each performed with a batch of 256 rollouts. We used a peak learning rate of which decayed to 0 throughout training. We clipped the gradient by Euclidean norm with a threshold of 1. We trained for 10 full passes over the unlabeled set, which amounts to 390 PPO steps. Performance typically peaked very early on during training (see Figure 5(c)). We set and both to 1 for generalized advantage estimation [54]. We used a fixed KL regularizer coefficient as opposed to an adaptive one. We tuned the coefficient value for both simulated and human PPO, and settled with 0.02 for human PPO, and 0.002 for simulated PPO. We note that suitable values for the KL regularizer coefficient depend on the early stopping criteria and the scale of surrogate reward values.
B.2 Quark
We re-implement Quark for our needs and make several modifications. First, the original Quark formulation accumulates rollouts during training and stores them in a pool that consistently grows. We found this led to overhead that increased during training (since after each rollout batch is generated, the pool is expanded and rollouts in the pool are re-sorted by their reward values). To operate under a reasonable compute budget, we discard previous rollouts once a new batch of rollouts is generated. In other words, the pool is reset once rollout is performed. This modification made the compute cost constant throughout training and thus more predictable overall. Second, we found that training on rollouts of more bins led to worse efficiency for reward optimization, and thus opted to train only on rollouts of the top-scoring bin (best-quantile variant in the original paper [37]). Preliminary ablations on a simple sentiment task showed that any potential loss in perplexity for the best-quantile variant can be compensated by turning up the KL regularizer. Lastly, we found the entropy penalty used in the original Quark formulation to give no benefit for working with instruction following. Small entropy penalty terms were enough to cause big degradations in text generation quality in terms of fluency.
For the official run with reported results, we used a KL regularizer coefficient of 0.05, a peak learning rate of which decayed to 0 throughout training. Each Quark step had batch size 512 for rollout, and 2 epochs of gradients updates each with batch size 256. We clipped the gradient by Euclidean norm with a threshold of 1. We trained for 10 full passes over the unlabeled set, which amounts to 390 Quark steps.
Appendix C Pairwise preference simulation
C.1 Details about simulated annotators
For all our simulated annotators we used OpenAI API to generate outputs. We first discuss below the overall design choices for all our simulators below, and then discuss our annotator pool below in more detail. For all the actual prompts we used refer to https://github.com/tatsu-lab/alpaca_farm.
Randomized order.
For each annotator, we randomize the ordering between the two outputs to annotate, i.e., we randomly choose which output is the first and which is the second. We found randomization to be important given that the first output is often preferred by simulated annotators.
Prompts with and without inputs.
Following the Alpaca dataset [62] and self-instruct framework [68] some instructions have associated inputs, while others do not. For each annotator, we thus write two corresponding prompts, one for instructions with inputs and one for instructions without inputs. Both prompts are essentially the same but in-context examples differ in the presence of the input.
Batching for GPT4.
When adding in-context examples, prompts can become relatively long, which leads to high-cost and waiting time when using GPT-4 as a simulator. To decrease cost and increase annotation speed, we amortize the cost of in-context examples by providing a batch of instruction-output pairs to annotate at once by GPT-4. For our simulated annotator we use a maximum batch size of 5 but found during development that we could fit batch size up to 20 in the context window without significantly decreasing performance. To improve performance when using batching, we found it useful to provide a few in-context examples in a batched format and to index every component of an annotation (instruction, input, output, …).
Improving parsing for ChatGPT.
Overall we found ChatGPT to be much more sensitive and harder to use as a simulator. In particular, we found it to be more sensitive to the prompt format and to often fail to generate annotations that could be parsed, e.g., by responding “Neither is better, this depends on personal preferences” despite being explicitly instructed to choose a preference. We found two tricks to be effective to make ChatGPT’s more parsable. First, we add a negative bias to tokens such as “Neither” and “Both” and a positive bias to the tokens that we hoped to match. We found the aforementioned biasing of tokens to work well but it can be problematic when using Chain of Thought reasoning. A second trick that we found to be effective is to ask ChatGPT to generate a JSON object that contains a string field with a short explanation (Chain of Thought) and a boolean field that indicates whether the first output was preferred.
Now that we have discussed the overall design choices for our simulated annotators, we discuss in more detail the prompts and parameters for each of our annotators.
AlpacaFarm’s evaluation annotators .
To try to match the bias and variance of human annotators, we use a pool of 13 simulated annotators that were developed at different stages of the project. In particular, we use the following sources of variations:
-
•
Models. Five of the annotators are powered by GPT-4, four by ChatGPT, and four by Davinci003. The difference between different annotators for the same model is mostly the prompt.
-
•
In-context examples. Prompts for the same models use different numbers of in-context examples.
-
•
Prompt format. We use different prompt formats between and for the same model. For example different batch sizes and different formats of outputs (JSON vs raw text).
-
•
Preferences. Two of the GPT4 annotators are explicitly prompted to prefer sequences that are respectively long and short.
-
•
Sampling. For each annotator in the pool, we use a sampling temperature of 1.0 with top also 1.0. The high temperature means that we have variability that arises from sampling.
AlpacaFarm’s training annotators .
Our simulated annotators for training are the same as the evaluation annotators except that we flip the output with 0.25 probability. We implement this by taking a mixture between and an independent Bernoulli random variable with probability 0.5. This means that we only need to label half of the outputs for training, which makes it faster and cheaper.
GPT4.
For the GPT4 annotator we use a prompt with batch size five that corresponds to one of the prompts from our simulated pool of annotators. For we use temperature 0, i.e., deterministic annotations.
C.2 Additional results
We now provide additional results for understanding our pairwise annotators.


Our pool of annotators has low bias and matches human variance.
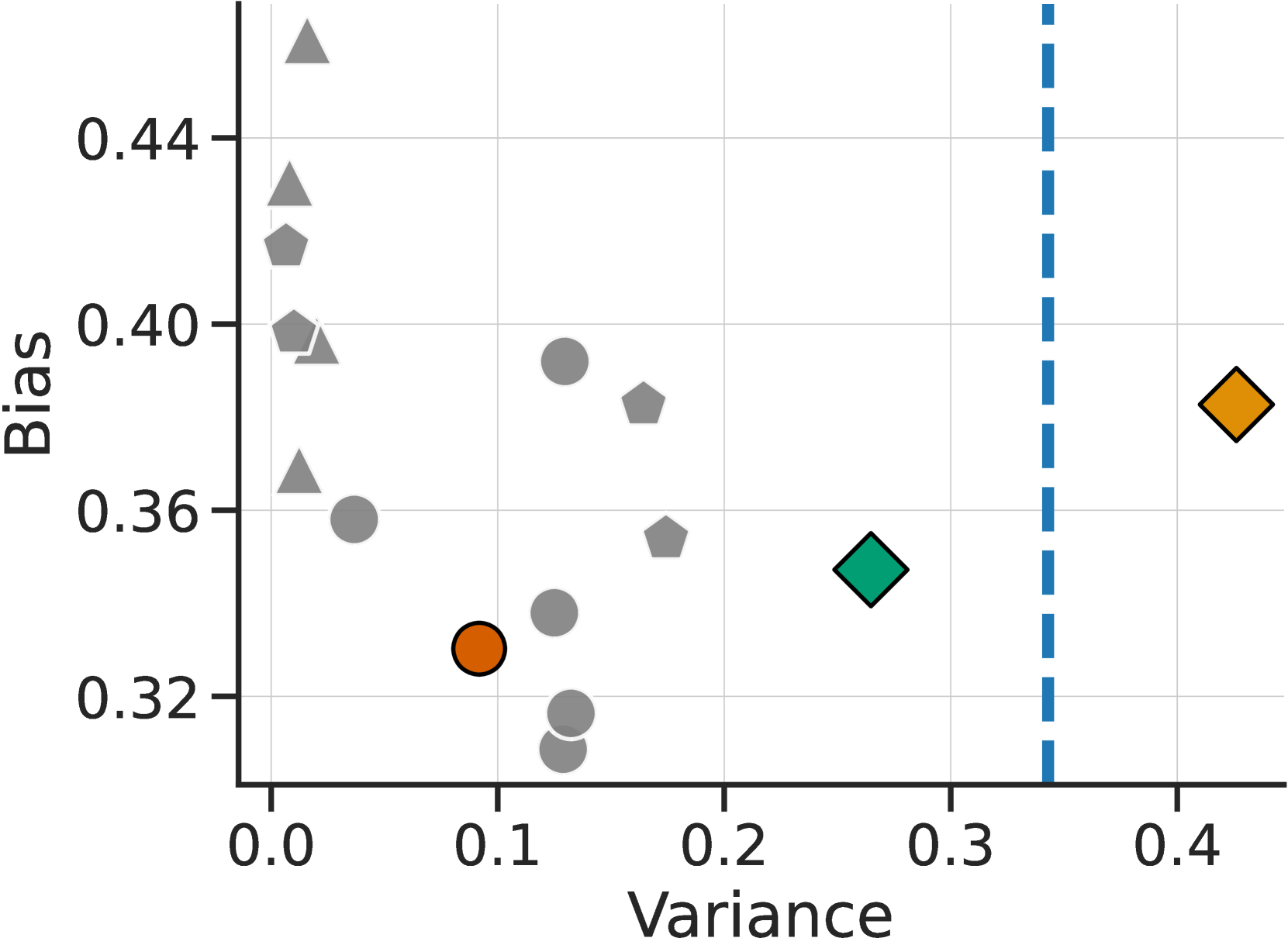
Figure 7 shows the estimated bias (y-axis) and variance (x-axis) of simulated evaluators. We see that single evaluators have a smaller variance (less than 0.2) than humans (blue line, 0.34). This lack of variability makes emulating it with a proxy reward very easy and leads to unrealistic over-optimization properties in the simulator, as seen in Figure 5(c). Using a pool of annotators (green point) for evaluation and additionally adding noise (orange) during training gives an estimated variance significantly closer to humans (blue line 0.35). We hypothesize that this is necessary for the simulator to show a similar over-optimization behavior as humans. Concerning the bias, we find that our simulated annotators for evaluation and training both have low bias values (0.38 and 0.35) on par with one of our best GPT-4 annotators (0.33).
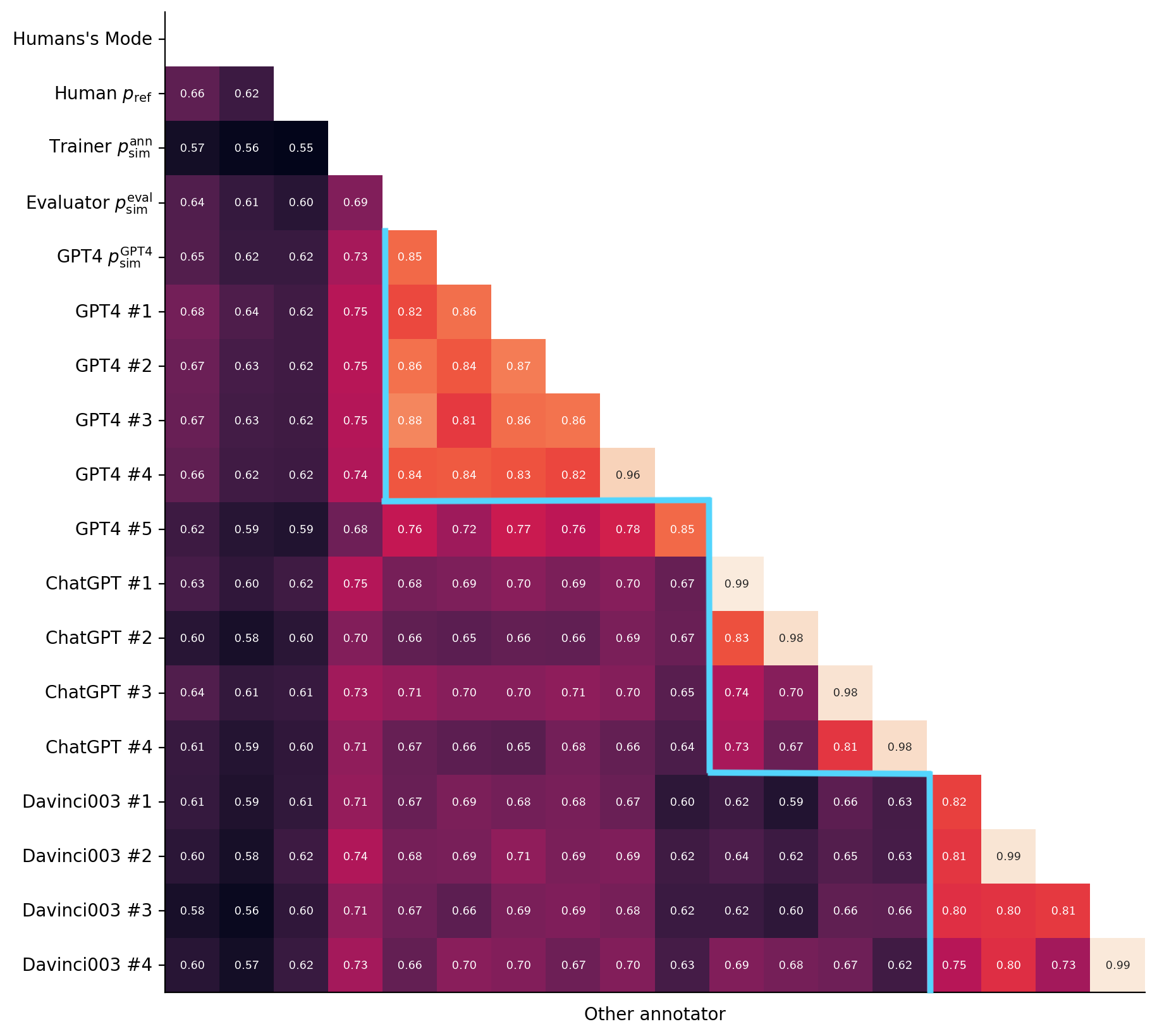
Variability in a pool of annotators mostly comes from the underlying model.
In Figure 8 we show the pairwise agreement between all annotators in our pool and all other annotators including the majority vote of humans (first column) and single humans (second column). The desired high variance corresponds to low values on the diagonal (annotators disagree with themselves) and low bias corresponds to high values in the first column (high agreement with the mode of humans). As in Figure 7, we see that our pool of annotators has low bias and high variance. Figure 8 also shows that the largest source of variability between annotators comes from the underlying model, as illustrated by the clusters that arise from GPT4, ChatGPT and Davinci003 annotators.

Humans and simulated annotators prefer longer outputs that contain lists.
One natural question is whether simulated and human annotators have biases towards different type of outputs, which would cause models in both frameworks to be qualitatively different. We identify two stylistic features, the length and the presence of lists, for which humans have a strong preference and analyze whether simulated annotators match those preferences. We found that humans prefer longer outputs of the time, while our simulated annotators prefer those of the time. Similarly, humans prefer outputs with lists of the time, while our simulated annotators prefer those of the time. This shows that our simulated annotators match well the stylistic preferences of humans, which suggests that models trained in our sandbox are optimizing similar preferences as those trained with human feedback and they will likely exhibit similar behaviors.
Appendix D Details on human data collection
Qualification.
We conducted the qualification of our annotators based on 25 qualification examples. The qualification examples were generated but an OPT 6B model that was studied in the earlier development phase of this project. The five student authors of this paper annotated a shared set of pairwise preferences. From the shared set, we selected 25 questions where the majority of the authors reached an agreement on the correct annotation. We then use these questions as a qualification test and selected the top 16 annotators whose agreement is the highest with the authors. We paid the annotators the same price for the qualification round as we did for the main qualification.
During the annotation process, we also compare each annotator’s preference to that of GPT-4. We identified one annotator whose agreement is around 50% with GPT-4, which is a clear outlier from other annotators. Therefore, we discontinued working with this annotator during the annotation project and removed their annotation.
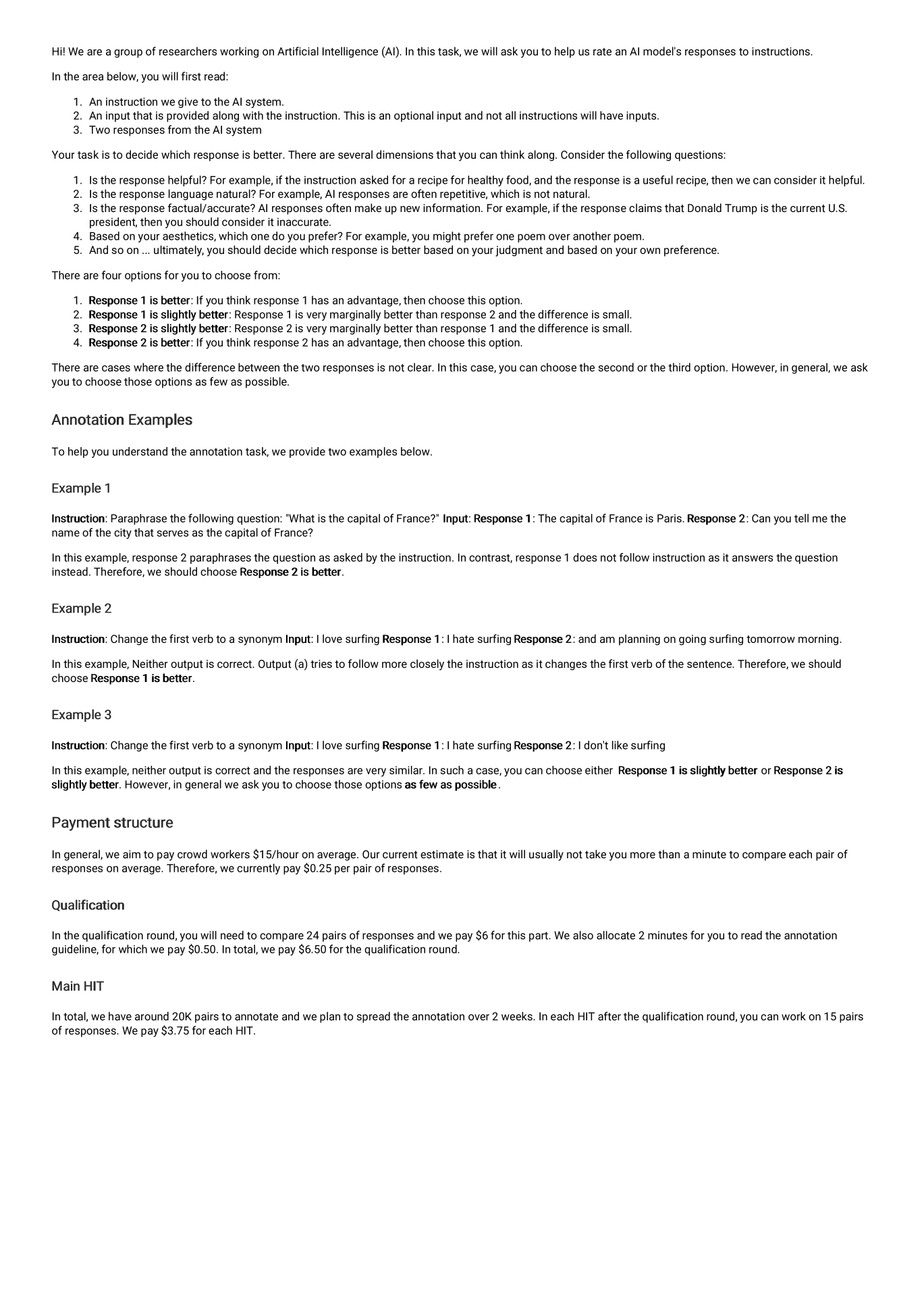
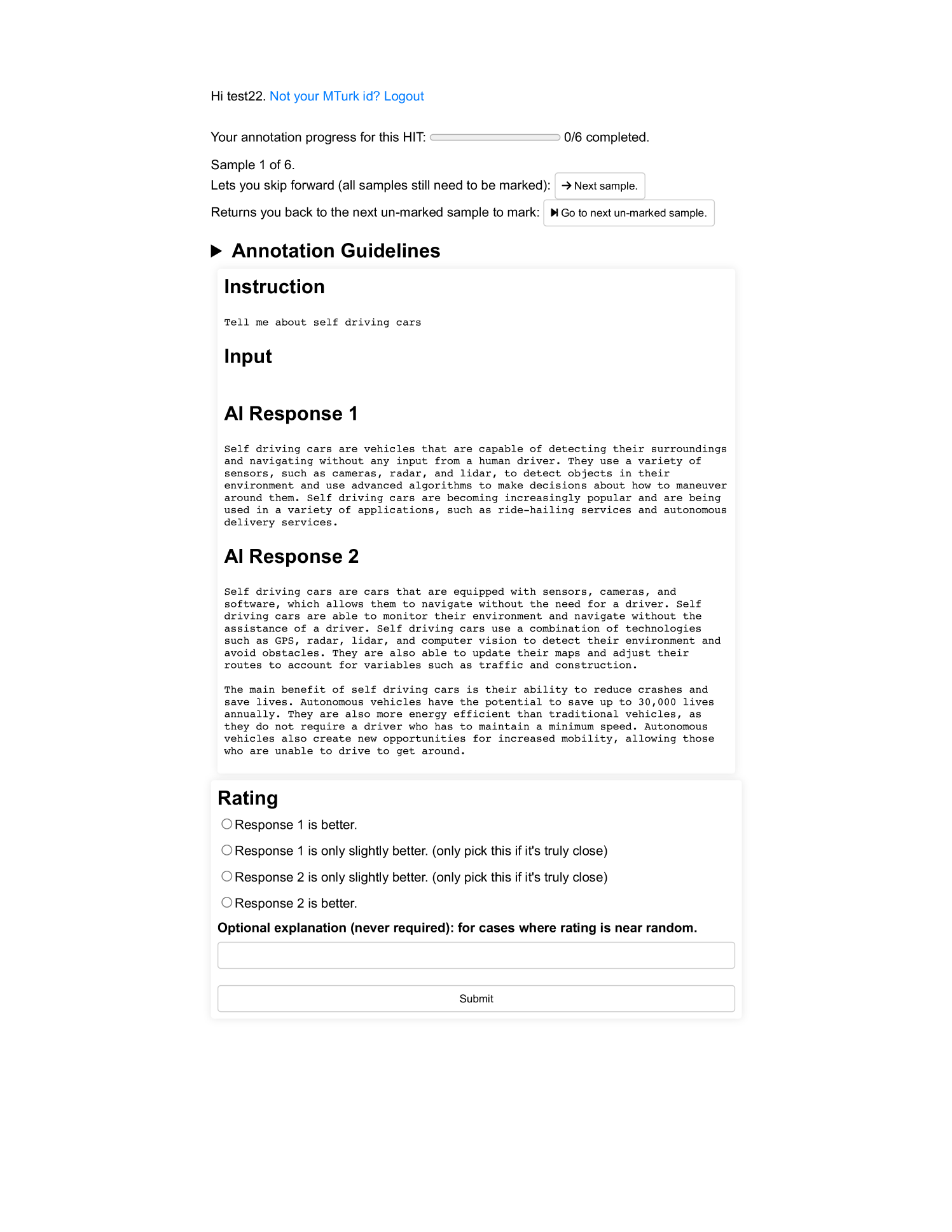
Annotation guideline.
We display our annotation guideline in Figure 10 and annotation interface in Figure 11. In our annotation process, we find that there are pairs that only differ in punctations or have minimal edit distance and we instruct the annotators to select a response as slightly better/worse if the difference between the pairs is marginal. As a result, around 18% of the collected preference selected the slightly better options. In our LPF experiments, we binarize the preference and treated the slightly better options the same as the normal preference labels. However, we release the more fine-grained labels as resources and leave the study to future work.
Appendix E Additional results
E.1 Label noise ablations for simulated annotators
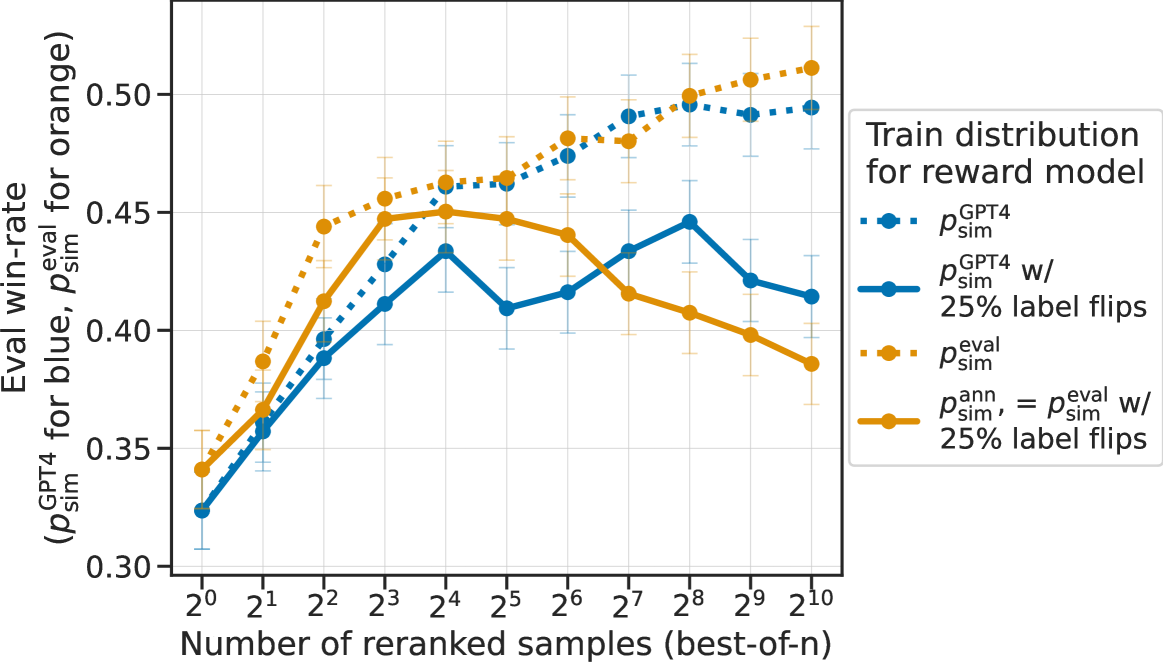
In this section, we ablate the different components of that add variability along two axes: randomizing across different simulated annotators, and adding label noise. To ablate the randomization across different annotators, we compare to the simple GPT-4 prompt with added label noise. To ablate the label noise, we compare to , which is without the label noise. We train reward models on these preference distributions and compare the performance of best-of- sampling.
Figure 12 sbows the results of the ablation, demonstrating clearly that added label noise provides the majority of the overoptimization effect. In particular, the two options that do not add label noise, and , keep increasing win-rates with more samples. This result suggests that modeling intra-annotator variability via label noise may be an important component to understanding learning from human preference data.
E.2 Understanding computational cost
While we have focused primarily on the performance of the final model, the computational cost of these methods is an important consideration. We provide time estimates for training on our specific implementation and compute environment (a single A100 machine). While these timings are specific to our experiments, we believe these insights may be useful in understanding the cost of learning from pairwise feedback.
To begin with, supervised fine-tuning and methods that directly adapt supervised fine-tuning like Binary Reward Conditioning and Binary FeedME are generally fast, taking less than an hour for 10k instructions. Best-of- sampling incurs no training cost but instead suffers a substantial inference time cost. The optimal for best-of- was around 16, which (in principle) translates into an increased cost of 16x for batched inference.
In our experiments, Expert Iteration works best when training on the outputs of best-of- sampling, which involves substantial amounts of compute to perform best-of- sampling on the unlabeled split. Concretely, this sampling process takes around 4 hours on the 20k unlabeled split and the subsequent fine-tuning takes less than an hour. We observe that PPO performance peaks on both human data and in simulation after 40-80 steps, which translates to less than 2 hours of compute time on the full machine.
E.3 Additional analysis of model outputs
In this section, we provide a qualitative analysis of the model outputs. In Table 5, we show three example outputs from SFT 10k, , and . As mentioned in Section 5.2, we find that the model outputs after LPF training often become much longer. In Table 6 and Table 7, we show the average length of model outputs of various systems in the number of characters, which qualitatively illustrates this phenomenon. While longer responses indeed lead to better human preference, we continue to see hallucinations in the output (e.g. in the example question about Berlin) and it is not clear to us whether our LPF models improve on the more critical aspects such as faithfulness, knowledge, etc.
|
What do you think about ChatGPT? |
|---|
|
SFT 10k: I think ChatGPT is a promising technology that has the potential to revolutionize the way we interact with computers. It has the ability to generate natural language text quickly and accurately, which can be used for many different applications. I think it’s an exciting technology that we’ll continue to see more and more uses for in the future. |
|
: I think ChatGPT is a fascinating development in natural language processing. It is an artificial intelligence system that is able to generate human-like text, allowing it to converse with humans on a variety of topics. It is able to learn from large datasets and improve its performance over time, allowing it to produce text with increasing accuracy and sophistication. I think it has a lot of potential applications, from natural language processing and machine translation, to automated customer service and natural language processing. It is an incredible step forward in AI technology, and I look forward to seeing what new developments come out of it in the future. |
|
: I think ChatGPT is a really cool technology that can generate natural language text based on an input. It allows for users to quickly generate text responses without needing to write code or create a custom natural language processor. It also is very good at understanding context and can generate text based on context and prompts. I think it has a lot of potential applications, such as automated customer service, natural language processing, and text generation. I think it’s pretty amazing how quickly the technology is advancing and it’s really cool to see what’s possible with AI and machine learning. I’m really excited to see what the future holds for ChatGPT and other AI technologies. |
|
Who made Berlin? |
|
SFT 10k: The city of Berlin was made by the German people. |
|
: The city of Berlin was made by various people over the course of its history. It was first established as a medieval trading post in the 12th century, and subsequently built up by a variety of different rulers. The city was heavily damaged during the Thirty Years’ War, but was rebuilt and expanded by the Hohenzollern dynasty in the 17th and 18th centuries. During the 19th century, Berlin became the capital of the German Empire, and was significantly expanded and modernized under the leadership of Mayor Otto von Bismarck. The city was also divided into East and West sectors following World War II, with each sector being ruled by separate Cold War-era governments. |
|
: The city of Berlin was made by various people over the centuries. The earliest known inhabitants of the area were the Tubal and Jabal tribes, who arrived in the region around 2300 BC. These tribes were later replaced by Celtic tribes, who founded the city of Berlin in the 1st century BC. The city was then conquered by the Romans in the 1st century AD and was renamed as ’Berlinium’. During the late Middle Ages, Berlin became an important city in the Holy Roman Empire and was ruled by various princes and electors. In the 17th century, Berlin gained its current shape under the rule of Prince-Elector Frederick William I, who established the city’s defensive ring of bastions and set up the first permanent settlements outside the city walls. In the 18th and 19th centuries, Berlin experienced a cultural and economic boom, becoming the capital of the Kingdom of Prussia in 1701 and the seat of the German Empire in 1871. The city was also the site of many historical events, including the foundation of the Weimar Republic in 1919 and the fall of the Berlin Wall in 1989. Today, Berlin is a bustling city with a population of over 3.7 million people, making it the third-largest city in Germany. |
|
How many black holes are known to exist at the time? |
|
SFT 10k: Nearly 100 million black holes are known to exist at the time. |
|
: At the time, there are believed to be several million black holes in the universe. This number is constantly increasing as astronomers discover more and more black holes through observation and study. Most black holes are found at the centers of many different galaxies, and are thought to be formed when the most massive stars in the galaxy run out of nuclear fuel and explode in a supernova. The resulting core of the star is so densely packed that nothing, not even light, can escape its powerful gravitational pull, giving it the name "black hole". |
|
: At the time of this writing, there are over 1000 known black holes in the universe. |
| Model | Number of characters |
|---|---|
| GPT-4 | 504.4 |
| ChatGPT | 333.4 |
| Davinci001 | 286.3 |
| SFT 52K | 383.2 |
| SFT 10K | 277.5 |
| LLaMA 7B | 950.5 |
| PPO 200 steps | 495.6 |
| PPO 80 steps | 623.7 |
| PPO 40 steps | 683.1 |
| Best-of-128 | 680.0 |
| Best-of-16 | 565.2 |
| Best-of-4 | 478.7 |
| ExpIter-128 | 524.7 |
| ExpIter-16 | 458.3 |
| ExpIter-4 | 422.1 |
| FeedMe | 371.4 |
| Model | Number of characters |
|---|---|
| GPT-4 | 504.4 |
| ChatGPT | 333.4 |
| Davinci001 | 286.3 |
| SFT 52K | 383.2 |
| SFT 10K | 277.5 |
| LLaMA 7B | 950.5 |
| PPO 80 steps | 863.4 |
| PPO 20 steps | 637.7 |
| Best-of-128 | 704.7 |
| Best-of-16 | 570.5 |
| Best-of-4 | 483.3 |
| ExpIter-128 | 527.5 |
| ExpIter-16 | 458.3 |
| ExpIter-4 | 407.4 |