用于车辆轨迹预测的卷积社会池
摘要
预测周围车辆的运动对于在复杂交通中部署的自动驾驶车辆来说是一项关键能力。 场景中所有车辆的运动受到交通环境的控制,即相邻车辆的运动和相对空间配置。 在本文中,我们提出了一种 LSTM 编码器-解码器模型,该模型使用卷积社交池作为社交池层的改进,以稳健地学习车辆运动中的相互依赖性。 此外,我们的模型根据机动类别输出未来轨迹的多模态预测分布。 我们使用公开的 NGSIM US-101 和 I-80 数据集评估我们的模型。 我们的结果表明,在模型的预测分布下,预测误差的 RMS 值和真实未来轨迹的负对数似然性方面比现有技术有所改进。 我们还对模型对各种交通场景的预测分布进行了定性分析。
1简介
为了安全有效地通过由人类驾驶员组成的复杂交通,自动驾驶车辆需要具有采取主动的能力,例如决定何时变道、超越另一辆车或减速以允许其他车辆并道。 这要求自动驾驶车辆具有一定的能力来推理周围车辆的未来运动。 这可以从现有的战术路径规划算法[24,17,22]中看出,该算法依赖于对周围车辆未来轨迹的可靠估计。
预测周围车辆的未来运动是一个具有挑战性的问题,因为涉及大量潜在变量,例如场景中所有驾驶员的最终目标以及不同驾驶员的驾驶风格的变化。 由于驾驶员做出的决定,车辆轨迹在较长时间范围内往往是高度非线性的。 此外,驾驶员行为本质上往往是多模式的,驾驶员可以在相同的交通情况下做出多个决定之一。 最后,车辆之间的相互作用往往会影响它们的运动。 场景中所有车辆的大量可能配置使得建模变得困难。
尽管存在这些挑战,但仍然可以利用车辆运动的结构:
-
•
车辆运动可以分为机动,这可以解释未来运动的多模态性质。 例如,一辆以更快的速度接近领先车辆的车辆会刹车并减速,或者改变车道超车。
-
•
高速公路上有明确的车道结构和运动方向。 这可以用来模拟车辆之间的交互
继长短期记忆(LSTM)网络在序列学习和生成任务[1,7,3]中建模非线性时间依赖性方面取得成功之后,我们提出了一种基于 LSTM 编码器-解码器的模型用于高速公路交通情况下的车辆运动预测。 特别是,我们的模型具有以下特点:
-
1.
卷积社会池: 我们提出了一种新颖的社交池层作为[1]中提出的替代方案。 我们将卷积层和最大池化层(而非全连接层)应用于 LSTM 状态的 social-tensors 中,这些状态编码了相邻车辆过去的运动。
-
2.
基于机动的解码器: 我们的 LSTM 解码器生成六个机动类别未来运动的概率分布,并为每个机动类别分配一个概率。 这解释了车辆运动的多模态性质。
2相关研究
Lefevre 等人 [16]对车辆运动预测模型进行了广泛的调查,其中模型分为基于物理的模型、基于机动的模型和交互感知模型。 接近我们的方法的是基于机动的模型和交互感知模型。
基于机动的模型:
将车辆运动分类为语义上可解释的机动类别已在高级驾驶员辅助系统和自然驾驶研究中得到广泛解决。 特别令人感兴趣的是使用已识别的机动来更好地预测未来轨迹的工作[8,21,23,14,20,6]。 这些方法通常涉及用于对机动进行分类的机动识别模块和机动特定轨迹预测模块。 机动识别模块通常是使用车辆过去的位置和运动状态以及上下文线索作为特征的分类器。 基于启发式的分类器 [8]、贝叶斯网络 [21]、隐马尔可夫模型 [14, 6]、随机森林分类器 [ 20]和循环神经网络已被用于机动识别。 轨迹预测模块根据车辆的机动类别输出其未来位置。 多项式拟合[8]、机动特定运动模型[21]、高斯过程[23, 14]和高斯混合模型 [6]已用于轨迹预测。
交互感知模型:
用于运动预测的交互感知模型考虑了车辆间交互对车辆运动的影响。 可以找到两种不同的方法来整合车辆间的交互。 第一组方法[6, 2]使用基于车辆相对配置的手工成本函数,并根据这些成本函数对未来运动做出最佳预测。 基于成本函数的方法不依赖于训练数据,并且可以推广到新的流量配置。 然而,它们可能会受到手工成本函数设计得如何的限制。 整合车辆间交互的第二种方法是从真实交通的轨迹数据中隐式地学习它。 然而,由于流量配置变化很大,这种方法需要大量数据集来进行泛化。 这种方法已在先前的工作中用于两辆车接近交叉路口[9]的情况以及高速公路[20]上的横向运动预测。 我们在本文中使用数据驱动的方法进行车辆间交互,因为它不受手工制作的成本函数设计的限制,而且还由于真实高速公路交通的大型数据集的可用性[4 ,5]。
用于运动预测的循环网络: 由于运动预测可以被视为序列分类或序列生成任务,因此最近提出了许多基于循环神经网络(RNN)的方法用于机动分类和轨迹预测。 Khosroshahi 等人 [10] 和 Phillips 等人 [19] 使用 LSTM 对车辆操纵进行分类交叉点。 Kim 等人 [11]提出了一种 LSTM,可以以 0.5 s、1 s 和 2 s 的间隔预测未来车辆在占用网格中的位置。 与这种方法相反,我们的模型输出车辆未来位置的连续多模态概率分布,预测范围为 5 秒。李 等。 [15]提出了一种将条件变分自动编码器(CVAE)与 RNN 编码器-解码器相结合的模型,用于轨迹预测。 虽然这允许通过对 CVAE 进行采样来进行多模态预测,但该模型只能提供预测分布的样本,而不是分布本身的估计。 在他们的开创性工作中,Alahi 等人 [1]提出了社交 LSTM,它通过以下方式联合建模和预测密集人群中行人的运动:使用社会统筹层。 我们通过使用卷积社交池改进了这种方法。 我们还将高速公路的车道结构纳入我们的社交池层。 最后,Kuefler 等人 [13]使用基于门控循环单元(GRU)的策略,使用行为克隆和生成对抗性模仿学习范例来生成加速度和偏航车辆运动的自行车模型的速率值。 我们将轨迹预测结果与[13]中报告的结果进行比较。
3问题表述
我们将运动预测公式化为根据每个时刻 的轨迹历史及其周围车辆的轨迹历史来估计车辆未来位置的概率分布。
3.1 参考框架
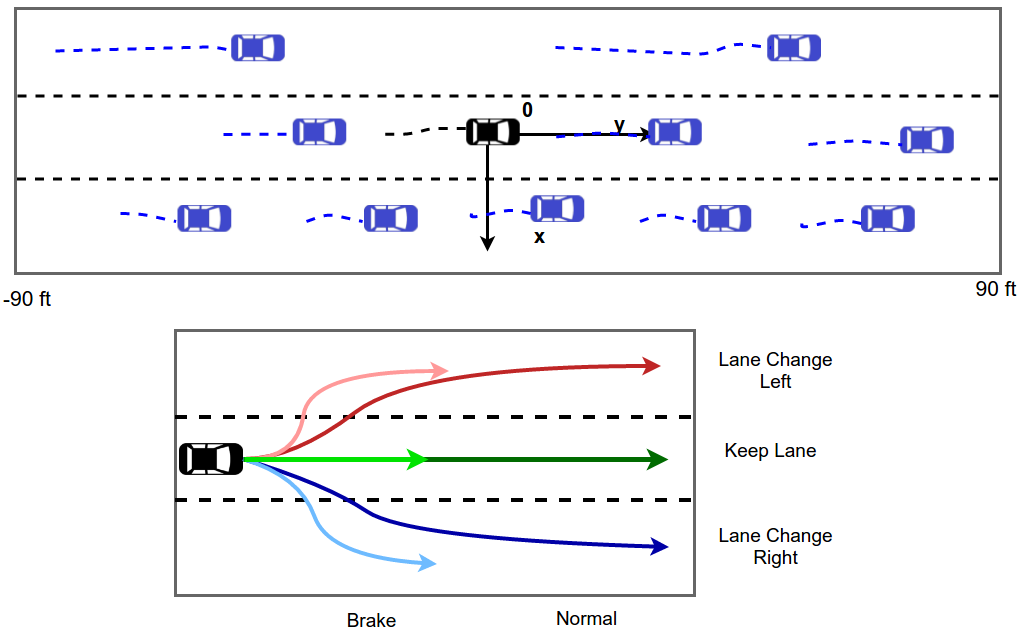
我们使用固定参考系,原点固定在时间 预测的车辆上,如图 2 所示。 y 轴 指向高速公路的运动方向,x 轴 是与其垂直的方向。 这使得我们的模型独立于车辆轨迹的获取方式,特别是可以应用于自动驾驶车辆上的车载传感器的情况。 这也使得该模型不受道路曲率的影响,只要有车载车道估计算法,就可以应用于高速公路上的任何地方。
3.2 输入和输出
我们模型的输入是轨迹历史记录
| (1) |
其中:
| (2) |
是预测车辆和纵向方向 英尺内的所有车辆在 时刻的 和 坐标且在被预测车辆的两个相邻车道内,如图2所示。
模型的输出是概率分布
| (3) |
在哪里,
| (4) |
是预测车辆的未来坐标
3.3概率运动预测
我们的模型估计条件分布。 为了让模型产生多模态分布,我们将其扩展为机动 ,给出:
| (5) |
其中:
| (6) |
是未来每个时间步的二元高斯分布的参数,对应于未来位置的均值和方差。
3.4机动类别
我们考虑三个横向和两个纵向机动类别,如图2所示。 横向操纵包括左右变道和车道保持操纵。 由于变道涉及准备和稳定,因此我们将车辆定义为处于变道状态 4 秒。 实际的交叉。 纵向操纵分为正常驾驶和制动。 如果车辆在预测范围内的平均速度小于预测时速度的 0.8 倍,我们将其定义为正在执行制动操作。 我们以这种方式定义我们的操纵,因为这些操纵类别是由车辆通过转向灯和刹车灯相互传达的,这将作为未来工作的提示。
4模型
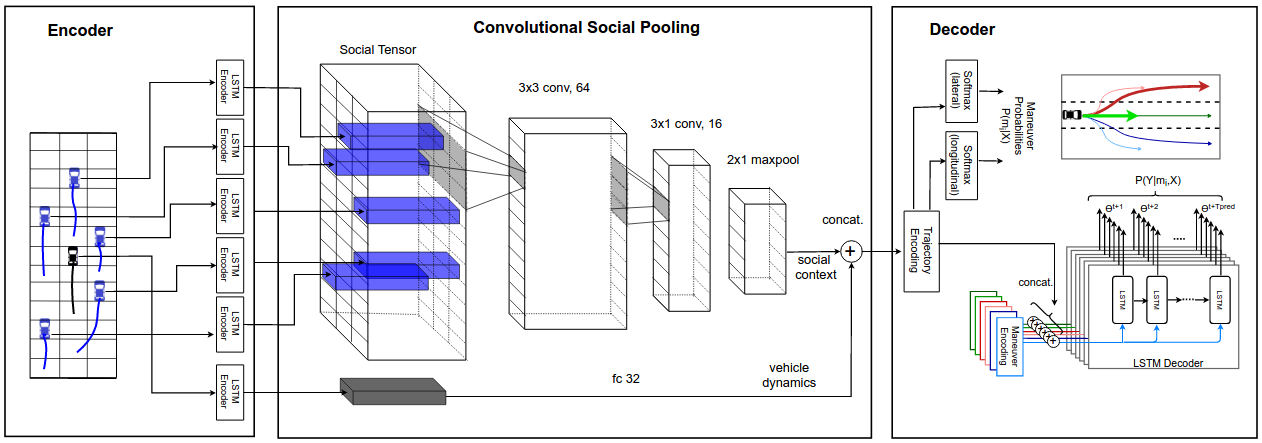
图3显示了我们提出的模型。 它由 LSTM 编码器、卷积社交池层和基于策略的 LSTM 解码器组成。
4.1LSTM编码器
我们使用 LSTM 编码器来学习车辆运动的动力学。 对于每个时刻,最新 轨迹历史帧的片段都会通过 LSTM 编码器传递给正在预测的车辆及其周围的所有车辆。 每辆车的 LSTM 状态在过去的 帧中逐帧更新。 每辆车的最终 LSTM 状态预计会对该车辆的运动状态进行编码。 每辆车使用的 LSTM 具有共享权重。 这允许所有车辆的 LSTM 状态组件之间直接对应。
4.2 卷积社交池
虽然 LSTM 编码器捕获车辆运动动态,但它无法捕获场景中所有车辆运动的相互依赖性。 [1] 中提出的社会池化通过将被预测智能体周围的所有智能体的 LSTM 状态池化为社会张量来解决这个问题。 这是通过围绕被预测的智能体定义一个空间网格并根据场景中智能体的空间配置使用 LSTM 状态填充网格来完成的。 图3显示了社会张量的示例。 除了被预测的智能体的 LSTM 状态之外,使用此社交张量作为模型的输入已被证明可以提高未来运动预测的准确性[1, 15]。 这是有道理的,因为模型现在可以访问周围代理的运动状态及其空间配置。
然而,之前的所有社交池 [1, 15] 实例都将全连接层应用于社交张量。 这是低效的,因为它破坏了社会张量的空间结构。 空间上彼此相邻的单元变得等同于全连接层中彼此远离的单元。 这可能会导致测试集的泛化问题,特别是当代理可以处于各种不同的空间配置时。 例如,假设训练集在社交张量的空间位置 处没有 LSTM 状态的单个实例。 当测试集中遇到这样的实例时,模型将无法泛化。 特别是,即使在空间网格位置 和 处存在 LSTM 状态的训练实例,这也将成立,尽管由于空间局部性,这些实例显然是有帮助的。
作为补救措施,我们建议在社交张量上使用卷积层和池化层,称为卷积社交池。 卷积层的等方差有望帮助学习社会张量的空间网格内的局部有用特征,并且最大池层有望增加局部平移不变性,这两者都有助于解决上述问题。 4 节进一步探讨了这种现象。
我们通过基于车道定义网格来设置社交张量。 空间网格围绕被预测的车辆定义,其中每一列对应一个车道,行之间的距离为 15 英尺,大约等于一辆车的长度。 社会张量是通过用周围的汽车位置填充该网格来形成的。 然后,我们将两个卷积层和一个池化层应用于社交张量,如图 3 所示,以获得社交上下文编码。 此外,预测车辆的 LSTM 状态通过全连接层以获得车辆动力学编码。 将两个编码连接起来形成完整的轨迹编码,然后将其传递给解码器。
|
|
CV |
|
|
V-LSTM | S-LSTM | CS-LSTM | CS-LSTM(M) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE (m) | 1 | 0.73 | 0.66 | 0.69 | 0.68 | 0.65 | 0.61 | 0.62 | ||||||||
| 2 | 1.78 | 1.56 | 1.51 | 1.65 | 1.31 | 1.27 | 1.29 | |||||||||
| 3 | 3.13 | 2.75 | 2.55 | 2.91 | 2.16 | 2.09 | 2.13 | |||||||||
| 4 | 4.78 | 4.24 | 3.65 | 4.46 | 3.25 | 3.10 | 3.20 | |||||||||
| 5 | 6.68 | 5.99 | 4.71 | 6.27 | 4.55 | 4.37 | 4.52 | |||||||||
| NLL | 1 | 3.72 | 2.02 | - | 1.17 | 1.01 | 0.89 | 0.58 | ||||||||
| 2 | 5.37 | 3.63 | - | 2.85 | 2.49 | 2.43 | 2.14 | |||||||||
| 3 | 6.40 | 4.62 | - | 3.80 | 3.36 | 3.30 | 3.03 | |||||||||
| 4 | 7.16 | 5.35 | - | 4.48 | 4.01 | 3.97 | 3.68 | |||||||||
| 5 | 7.76 | 5.93 | - | 4.99 | 4.54 | 4.51 | 4.22 |
4.3 基于机动的LSTM解码器
4.4 培训和实施细节
我们对模型进行端到端的训练。 理想情况下,我们希望最小化负对数似然
| (7) |
来自方程的项。 5 在所有训练数据点上。 然而,每个训练实例仅提供实际执行的一种机动类别的实现。 因此我们最小化负对数似然
| (8) |
相反,在所有训练实例上。
我们使用 Adam [12] 训练模型,学习率为 0.001。 编码器 LSTM 具有 64 维状态,而解码器具有 128 维状态。 卷积社交池层的大小如图3所示。 用于获取车辆动力学编码的全连接层的大小为32。 我们对所有层使用 =0.1 的leaky-ReLU 激活。 该模型是使用 PyTorch [18] 实现的。
5实验评估
5.1数据集
我们使用公开的 NGSIM US-101 [4] 和 I-80 [5] 数据集进行实验。 每个数据集包含在 45 分钟的时间跨度内以 10 Hz 捕获的真实高速公路交通轨迹。 每个数据集由 15 分钟的轻度、中度和拥堵交通状况片段组成。 该数据集提供了投影到本地坐标系的车辆坐标,如 3.1 节中所定义。 我们将完整的数据集分为训练集和测试集。 测试集包含 US-101 和 I-80 数据集 3 个子集中每个子集的四分之一轨迹。 我们将轨迹分成 8 秒的片段,其中使用 3 秒的轨迹历史和 5 秒的预测范围。 这些 8 s 片段以 10 Hz 的数据集采样率进行采样。 然而,我们在将每个片段输入 LSTM 之前将其下采样 2 倍,以降低模型复杂性。
5.2评估指标
我们按照 5 秒的预测范围内预测轨迹相对于真实未来轨迹的均方误差 (RMSE) 的根来报告结果,如 [13] 中所做的那样。 对于生成二元高斯分布的 LSTM 模型,高斯分量的均值用于 RMSE 计算。 对于生成多模态预测分布的模型,我们使用概率最高的模态来计算 RMSE。
虽然 RMSE 为模型的预测准确性提供了切实的衡量标准,但它在评估多模态预测时存在局限性。 RMSE 偏向于对模式进行平均的模型。 特别是,这个平均值可能并不代表一个好的预测。 例如,想要超越另一辆车的驾驶员可以通过切换到紧邻的左侧或紧邻的右侧车道,同时加速来实现。 这两种模式的平均值是在保持车道的同时加速。
为了解决这个限制,我们还报告了模型生成的预测分布下真实轨迹的负对数似然(NLL)。 虽然 NLL 值不能直接解释为物理量,但它们使我们能够比较单模态和多模态预测分布。
5.3比较型号
我们比较以下基线和系统设置:
基线:
-
•
恒速(CV):我们使用恒速卡尔曼滤波器作为最简单的基线
-
•
C-VGMM + VIM: 我们使用基于机动的变分高斯混合模型和[6]中描述的基于马尔可夫随机场的车辆交互模块作为我们的第二个基线。 我们修改模型以使用本工作中描述的机动类别,以便进行公平的比较
-
•
GAIL-GRU:我们考虑[13]中描述的生成对抗性模仿学习模型。 由于两篇作品中使用了相同的数据集,因此我们使用作者在原始文章中报告的结果。 需要注意的是,GAIL-GRU 轨迹是通过一次运行一辆车的策略生成的,而周围的所有车辆都根据 NGSIM 数据集的真实情况移动。 因此,该模型可以获取预测范围内相邻车辆的真实轨迹。
系统设置:
-
•
Vanilla LSTM (V-LSTM):这仅使用编码器 LSTM 中预测车辆的轨迹历史记录,并通过 LSTM 解码器生成单峰输出分布
-
•
具有完全连接的社交池的 LSTM (S-LSTM):这使用 [1] 中描述的完全连接的社交池并生成单峰输出分布
-
•
带有卷积社交池的 LSTM (CS-LSTM):它使用卷积社交池并生成单峰输出分布
-
•
具有卷积社交池和操作的 LSTM (CS-LSTM(M)):这是本文描述的完整模型,包括生成多模态预测分布的基于操作的解码器
5.4结果
表 1 显示了所比较模型的 RMSE 和 NLL 值。 S-LSTM、CS-LSTM 和 CS-LSTM(M) 在 RMSE 和 NLL 值方面优于基线[6, 13],显示了所提出模型的有效性。
我们注意到,与其他模型相比,普通 LSTM 和 CV 模型产生更高的 RMSE 值。 其他每个模型都使用一些有关邻近车辆运动的信息。 这表明车辆间交互是运动预测的有用线索,与[1,15,6]中报告的结果一致。
我们还注意到,CS-LSTM 在 RMSE 和 NLL 值方面都优于 S-LSTM。 这表明,与完全连接的社交池层相比,卷积社交池可以更好地模拟车辆运动的相互依赖性。 我们将在下一节进一步分析这一点。
最后,我们注意到与 CS-LSTM 相比,CS-LSTM(M) 导致更高的 RMSE 值。 这可能部分是由于错误分类的操作造成的,因为 CS-LSTM(M) 的 RMSE 值是使用与概率最高的操作相对应的轨迹来计算的。 然而我们注意到,与 CS-LSTM 相比,CS-LSTM(M) 的 NLL 值显着降低。 因此,与 CS-LSTM 生成的预测分布相比,CS-LSTM(M) 生成的预测分布更好地拟合真实轨迹。 这表明了任务的多模式性质。
5.5 全连接与卷积社交池
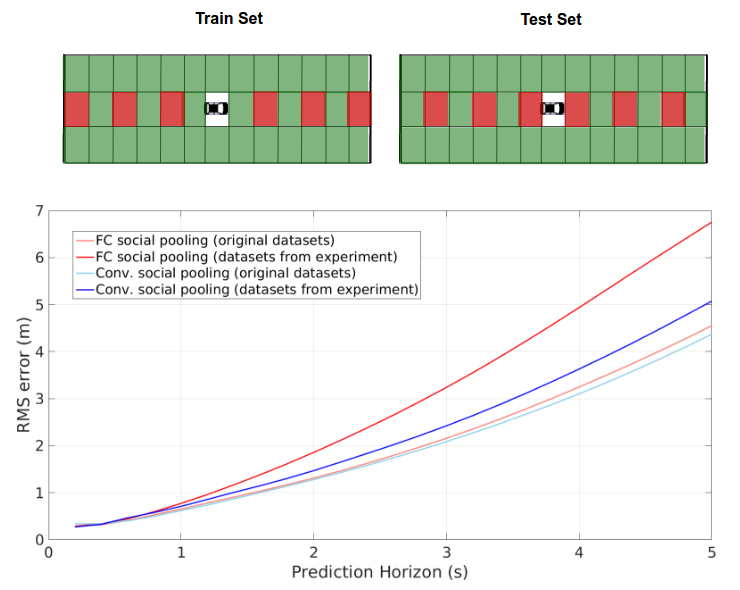
我们在 4.2 节中推测,如 [1] 中描述的完全连接的社交池将很难推广到测试集,即使场景中代理的空间模式存在轻微差异,如下所示:收集在社会张量中,而卷积社会池可以解决这个问题。 5.4 节中减少的预测误差似乎表明这是真的。 然而,为了进一步分析这一点,我们进行了以下实验。 我们从训练集中删除了与自我车道中车辆的奇数网格位置对应的所有实例,并从测试集中删除了与偶数网格位置对应的所有实例,如图4所示。 因此,我们的训练和测试集在社会张量的空间配置方面具有零重叠。 然而,我们有很多空间相似但不完全相同的配置。 我们针对完全连接的社交池和卷积社交池模型绘制了这个新训练和测试集的预测误差的 RMS 值。 我们看到完全连接的社交池模型的性能急剧下降,几乎达到 5.4 节中所示的普通 LSTM 的程度。 相比之下,卷积社交池的性能下降不太严重。 这表明,与使用完全连接的层相比,使用卷积层和池化层来聚合社交上下文是一种更加稳健的方法。
5.6预测的定性分析
在本节中,我们定性分析模型所做的预测,以深入了解其在各种流量配置中的行为。
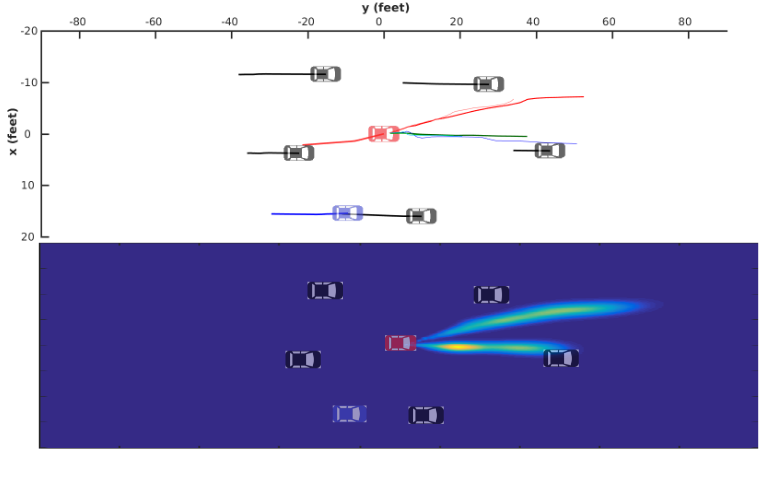
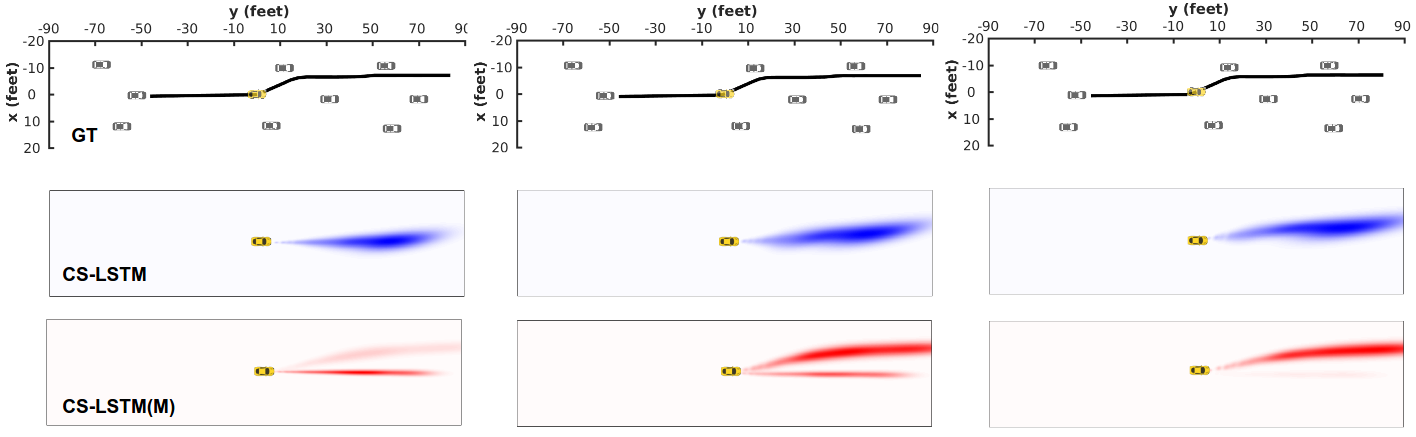
单模态与多模态预测: 图5显示了CS-LSTM生成的单峰预测分布和CS-LSTM(M)生成的多峰分布的比较。 该图显示了从左到右变道操作期间的三个连续帧。 最上面一行显示了轨迹历史和真实的未来轨迹。 中间行显示由 CS-LSTM 生成的预测分布,底行显示由 CS-LSTM(M) 生成的预测分布。 我们可以清楚地观察到 CS-LSTM(M) 的预测分布中的两种模式。 与车道变换相对应的模式在进一步的操纵中变得越来越突出,而与保持车道操纵相对应的模式逐渐消失。 我们进一步注意到,对于所有三种情况,与车道变换相对应的模式与真实的未来轨迹非常匹配。 然而,CS-LSTM 生成的单峰分布显示了两种模式的平均值,并且还具有较大的方差。 这说明了为什么与 CS-LSTM(M) 相比,CS-LSTM 实现了更低的 RMSE 值,同时导致更高的 NLL 值。
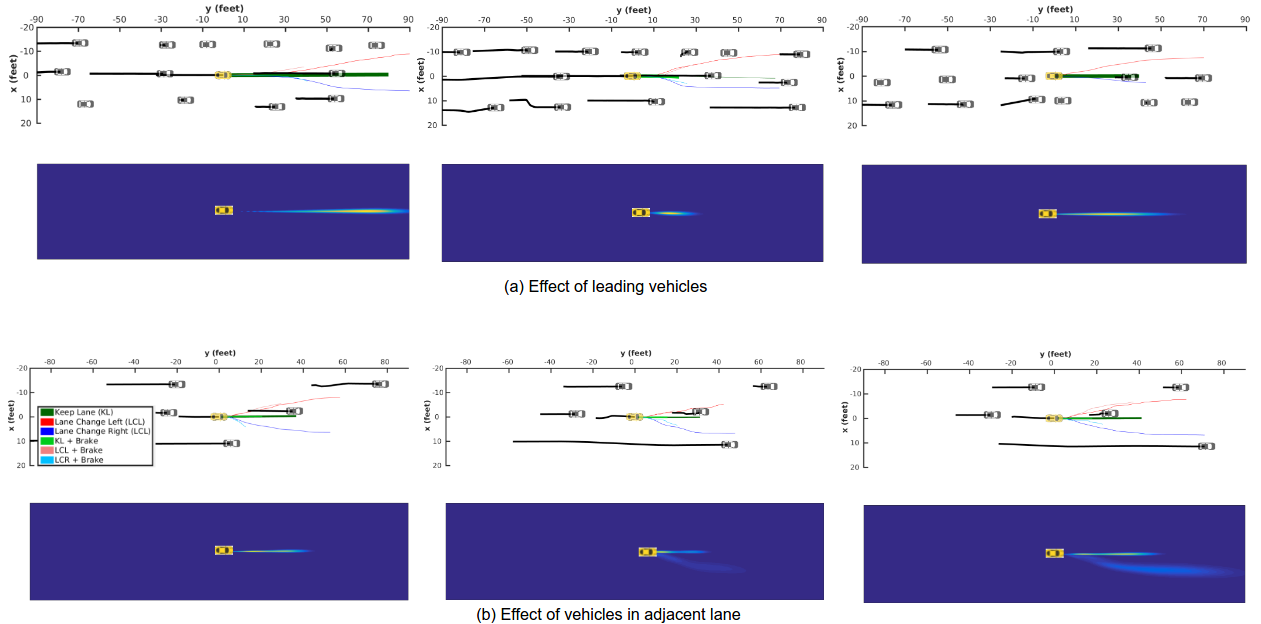
周围车辆对预测的影响: 图6显示了六种不同的流量场景。 每个图都显示了过去 3 秒内的轨迹历史记录以及每个机动类别在接下来 5 秒内的平均预测轨迹。 预测轨迹图的厚度与分配给每个机动类别的概率成正比。 此外,每张图都显示了完整预测分布的热图。
图 6(a) 显示了领先车辆对模型预测的影响。 第一个示例(左上)显示了自由流动交通的示例,其中预测车辆和领先车辆以大致相同的速度移动。 在第二个示例(中上)中,我们从轨迹历史记录中注意到,与预测车辆相比,领先车辆正在减速。 我们看到模型预测车辆会制动,尽管当前的运动表明情况并非如此。 相反,在第三个示例(右上)中,我们看到被预测的车辆几乎静止,而领先的车辆开始移动。 该模型预测车辆会加速,正如在走走停停的交通中所预期的那样。
图 6(b) 显示了相邻车道上的车辆对模型预测的影响。 这三个示例显示了相同的场景,时间间隔为 0.5 秒。我们注意到,被预测的车辆位于拥堵车道上,其领先车辆正在减速。 我们还注意到邻近的左侧车道很拥挤。 另一方面,相邻的右侧车道的行驶速度要快得多。 基于此,该模型为预测车辆停留在车道上并制动的概率分配了很高的概率,正如预期的那样。 然而,它也为通过移动到右车道的超车分配了很小的概率。 我们可以观察到,当相邻车辆移动得更远时,模型会为超车分配更大的概率,从而清理车道。
6 结论和未来的工作
我们提出了一种基于 LSTM 编码器-解码器的车辆轨迹预测模型,用于推理相邻车辆运动的相互依赖性。 我们的模型使用改进的社交池层,该层使用卷积连接,而不是完全连接的层,可以更稳健地建模并更好地概括场景中交互代理的各种空间配置。 我们将其称为卷积社交池。 我们提出的模型在两个大型公开可用的车辆轨迹数据集上优于所报道的最新技术。 我们的模型根据机动类别输出车辆未来运动的多模态分布。 我们对预测分布进行了定性分析。
当前方法的一个局限性是它纯粹依赖车辆轨迹来推断机动类别和未来轨迹。 使用视觉和基于地图的提示可以捕获许多补充信息。 这些可用于提高机动分类的准确性,从而提高未来运动预测的准确性。 未来的工作将侧重于将这些线索纳入模型中
7致谢
我们要感谢 Ishan Gupta 和匿名审稿人提供的有用意见。 我们还衷心感谢行业赞助商的持续支持。
参考
- [1] A. Alahi, K. Goel, V. Ramanathan, A. Robicquet, L. Fei-Fei, and S. Savarese. Social lstm: Human trajectory prediction in crowded spaces. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pages 961–971, 2016.
- [2] M. Bahram, C. Hubmann, A. Lawitzky, M. Aeberhard, and D. Wollherr. A combined model-and learning-based framework for interaction-aware maneuver prediction. IEEE Transactions on Intelligent Transportation Systems, 17(6):1538–1550, 2016.
- [3] K. Cho, B. Van Merriënboer, C. Gulcehre, D. Bahdanau, F. Bougares, H. Schwenk, and Y. Bengio. Learning phrase representations using rnn encoder-decoder for statistical machine translation. arXiv preprint arXiv:1406.1078, 2014.
- [4] J. Colyar and J. Halkias. Us highway 101 dataset. Federal Highway Administration (FHWA), Tech. Rep. FHWA-HRT-07-030, 2007.
- [5] J. Colyar and J. Halkias. Us highway i-80 dataset. Federal Highway Administration (FHWA), Tech. Rep. FHWA-HRT-07-030, 2007.
- [6] N. Deo, A. Rangesh, and M. M. Trivedi. How would surround vehicles move? a unified framework for maneuver classification and motion prediction. arXiv preprint arXiv:1801.06523, 2018.
- [7] A. Graves. Generating sequences with recurrent neural networks. arXiv preprint arXiv:1308.0850, 2013.
- [8] A. Houenou, P. Bonnifait, V. Cherfaoui, and W. Yao. Vehicle trajectory prediction based on motion model and maneuver recognition. In Intelligent Robots and Systems (IROS), 2013 IEEE/RSJ International Conference on, pages 4363–4369. IEEE, 2013.
- [9] E. Käfer, C. Hermes, C. Wöhler, H. Ritter, and F. Kummert. Recognition of situation classes at road intersections. In Robotics and Automation (ICRA), 2010 IEEE International Conference on, pages 3960–3965. IEEE, 2010.
- [10] A. Khosroshahi, E. Ohn-Bar, and M. M. Trivedi. Surround vehicles trajectory analysis with recurrent neural networks. In Intelligent Transportation Systems (ITSC), 2016 IEEE 19th International Conference on, pages 2267–2272. IEEE, 2016.
- [11] B. Kim, C. M. Kang, S. H. Lee, H. Chae, J. Kim, C. C. Chung, and J. W. Choi. Probabilistic vehicle trajectory prediction over occupancy grid map via recurrent neural network. arXiv preprint arXiv:1704.07049, 2017.
- [12] D. P. Kingma and J. Ba. Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980, 2014.
- [13] A. Kuefler, J. Morton, T. Wheeler, and M. Kochenderfer. Imitating driver behavior with generative adversarial networks. In Intelligent Vehicles Symposium (IV), 2017 IEEE, pages 204–211. IEEE, 2017.
- [14] C. Laugier, I. E. Paromtchik, M. Perrollaz, M. Yong, J.-D. Yoder, C. Tay, K. Mekhnacha, and A. Nègre. Probabilistic analysis of dynamic scenes and collision risks assessment to improve driving safety. IEEE Intelligent Transportation Systems Magazine, 3(4):4–19, 2011.
- [15] N. Lee, W. Choi, P. Vernaza, C. B. Choy, P. H. Torr, and M. Chandraker. Desire: Distant future prediction in dynamic scenes with interacting agents. 2017.
- [16] S. Lefèvre, D. Vasquez, and C. Laugier. A survey on motion prediction and risk assessment for intelligent vehicles. Robomech Journal, 1(1):1, 2014.
- [17] J. Nilsson, J. Silvlin, M. Brannstrom, E. Coelingh, and J. Fredriksson. If, when, and how to perform lane change maneuvers on highways. IEEE Intelligent Transportation Systems Magazine, 8(4):68–78, 2016.
- [18] A. Paszke, S. Gross, S. Chintala, G. Chanan, E. Yang, Z. DeVito, Z. Lin, A. Desmaison, L. Antiga, and A. Lerer. Automatic differentiation in pytorch. 2017.
- [19] D. J. Phillips, T. A. Wheeler, and M. J. Kochenderfer. Generalizable intention prediction of human drivers at intersections. In Intelligent Vehicles Symposium (IV), 2017 IEEE, pages 1665–1670. IEEE, 2017.
- [20] J. Schlechtriemen, F. Wirthmueller, A. Wedel, G. Breuel, and K.-D. Kuhnert. When will it change the lane? a probabilistic regression approach for rarely occurring events. In Intelligent Vehicles Symposium (IV), 2015 IEEE, pages 1373–1379. IEEE, 2015.
- [21] M. Schreier, V. Willert, and J. Adamy. Bayesian, maneuver-based, long-term trajectory prediction and criticality assessment for driver assistance systems. In Intelligent Transportation Systems (ITSC), 2014 IEEE 17th International Conference on, pages 334–341. IEEE, 2014.
- [22] S. Sivaraman and M. M. Trivedi. Dynamic probabilistic drivability maps for lane change and merge driver assistance. IEEE Transactions on Intelligent Transportation Systems, 15(5):2063–2073, 2014.
- [23] Q. Tran and J. Firl. Online maneuver recognition and multimodal trajectory prediction for intersection assistance using non-parametric regression. In Intelligent Vehicles Symposium Proceedings, 2014 IEEE, pages 918–923. IEEE, 2014.
- [24] S. Ulbrich and M. Maurer. Towards tactical lane change behavior planning for automated vehicles. In Intelligent Transportation Systems (ITSC), 2015 IEEE 18th International Conference on, pages 989–995. IEEE, 2015.