打赏本站
微信
 支付宝
支付宝

支付宝
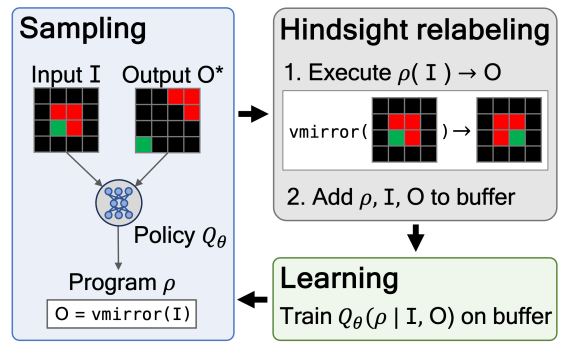
大型语言模型越来越多地解决人们普遍认为需要人类推理能力的任务。然而,这些模型在抽象与推理语料库(ARC)等通用智能基准上的表现仍然很差。在本文中,我们将 ARC 作为示例编程问题来处理,并介绍了一种新颖且可扩展的语言模型自我改进方法,称为代码迭代 (CodeIt) ...
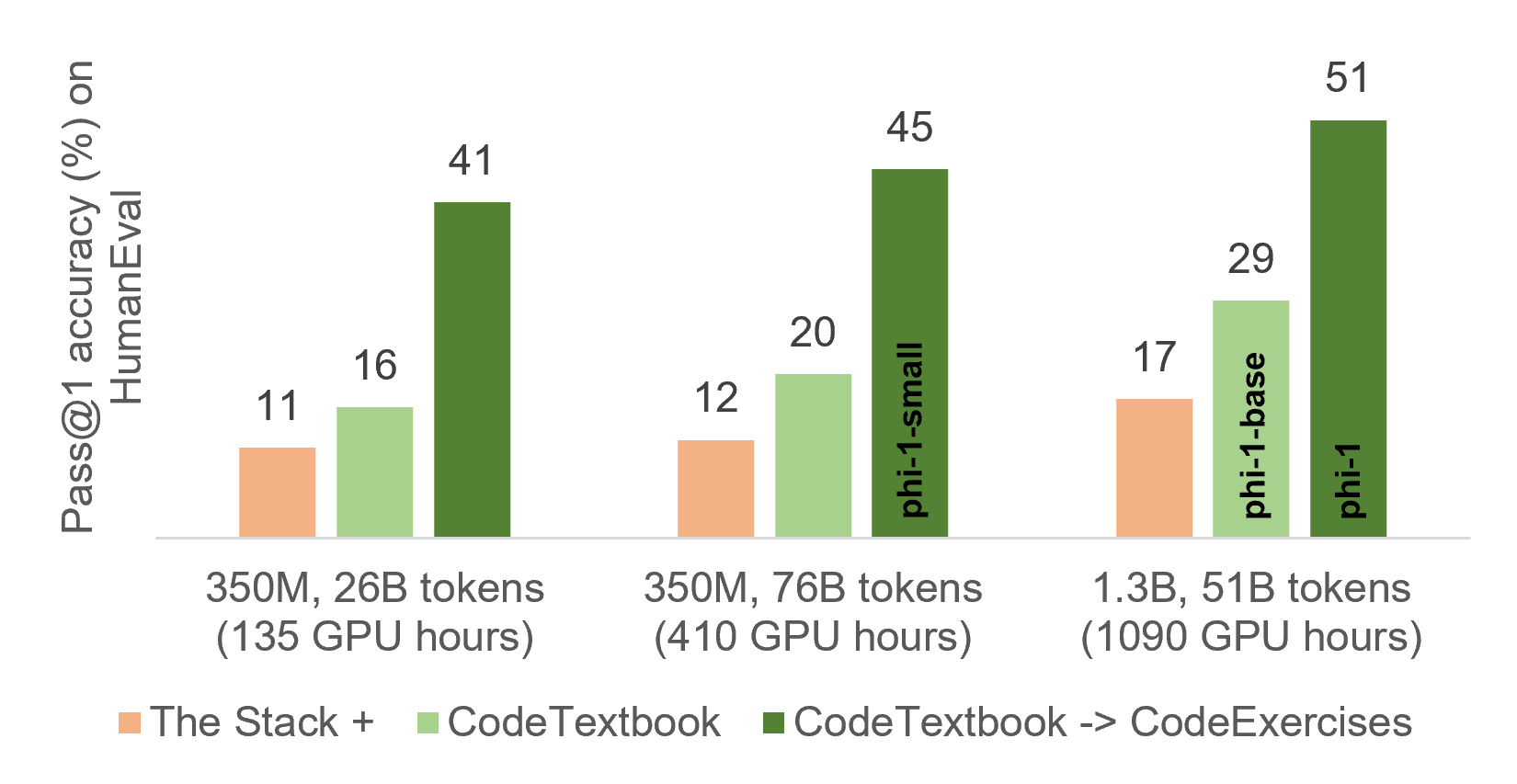
我们引入了 phi-1,一种新的大型代码语言模型,其尺寸比竞争模型小得多:phi-1 是一个基于 Transformer 的模型,具有 1.3B 参数,在 8 个 A100 上训练了 4 天,使用了``来自网络的教科书质量”数据(6B Token )以及使用 GPT-3.5 综合生成的教科书和练习(1B Token ) ...
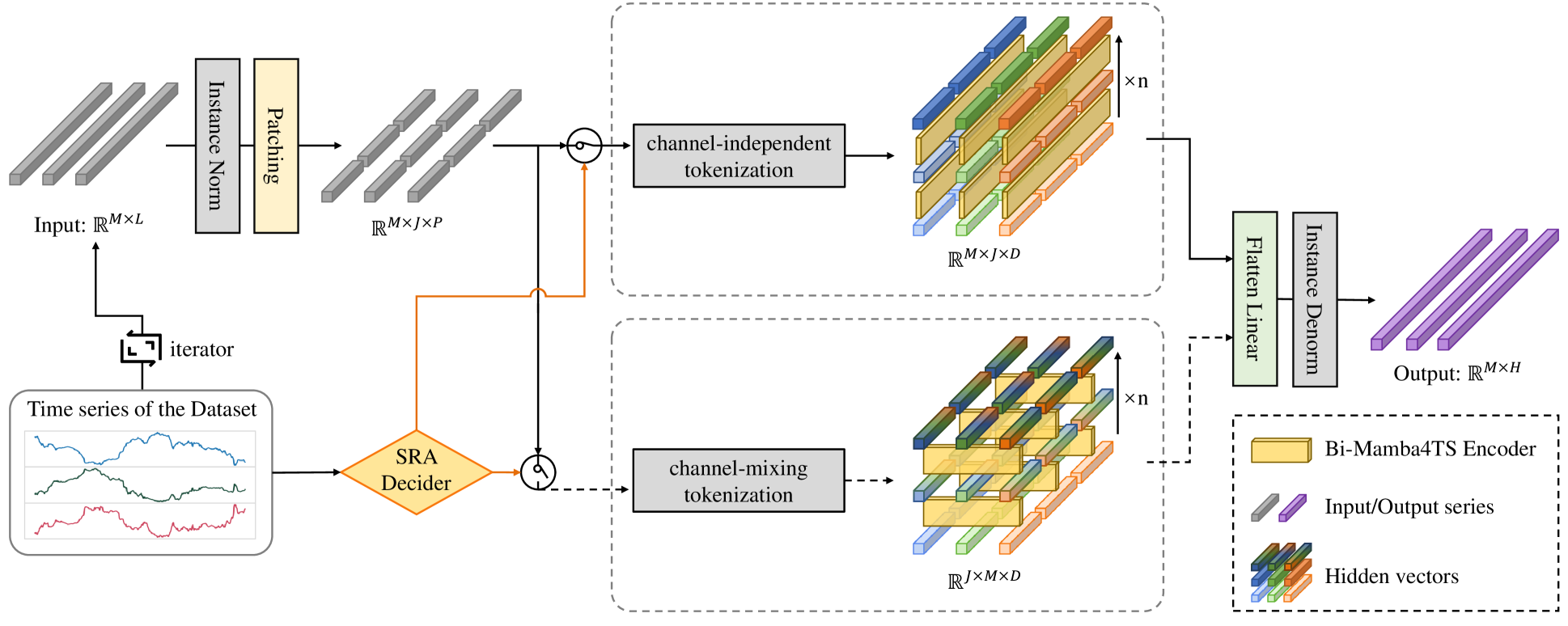
长期时间序列预测 (LTSF) 提供对未来趋势和模式的更长期洞察。近年来,深度学习模型尤其是 Transformer 在 LTSF 任务中取得了先进的性能。然而,Transformers 的二次复杂度提出了平衡计算效率和预测性能的挑战 ...
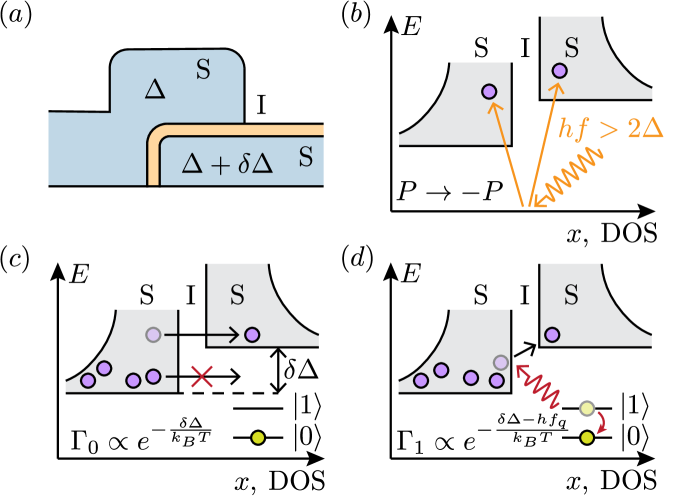
通常在超导量子位中观察到的准粒子密度超出平衡状态下的预期值多个数量级。这种不平衡的准粒子密度是否仍然具有与声子浴平衡的能量分布?在这里,我们通过测量约瑟夫森结两侧超导间隙差异的跨量子位中电荷奇偶校验切换的热激活来肯定地回答这个问题。然后,我们演示如何利用器件的间隙不对称性来操纵其奇偶校验 ...
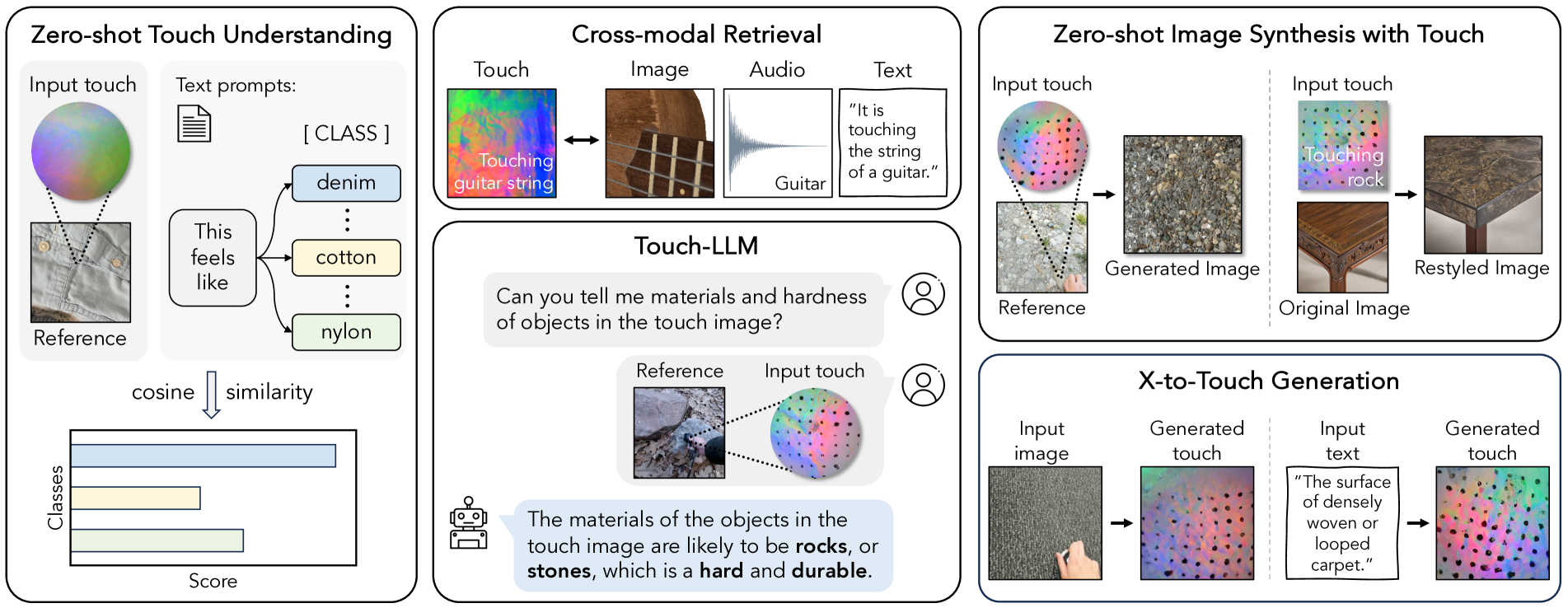
将触摸与其他方式联系起来的能力对人类和计算系统具有巨大的影响。然而,由于昂贵的数据收集过程和非标准化的传感器输出,触摸多模态学习仍然具有挑战性。我们推出 UniTouch,这是一种基于视觉的触摸传感器的统一触觉模型,可连接到多种模式,包括视觉、语言和声音 ...
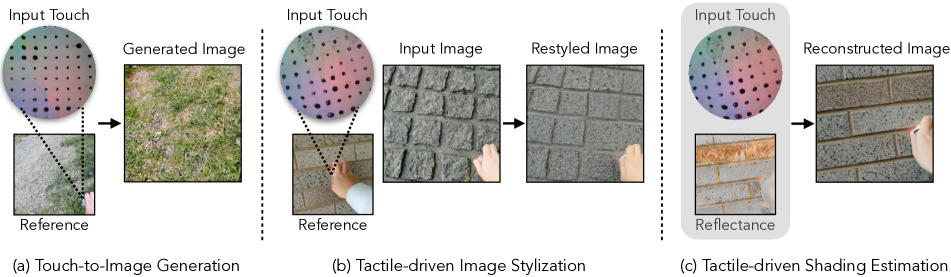
一项新兴的工作试图通过触摸产生可信的图像。然而,现有方法仅解决视觉触觉合成问题的狭窄方面,并且明显落后于其他领域的跨模态合成方法的质量。我们利用潜在扩散的最新进展,创建了一个从触觉信号合成图像的模型(反之亦然),并将其应用于许多视觉触觉合成任务 ...
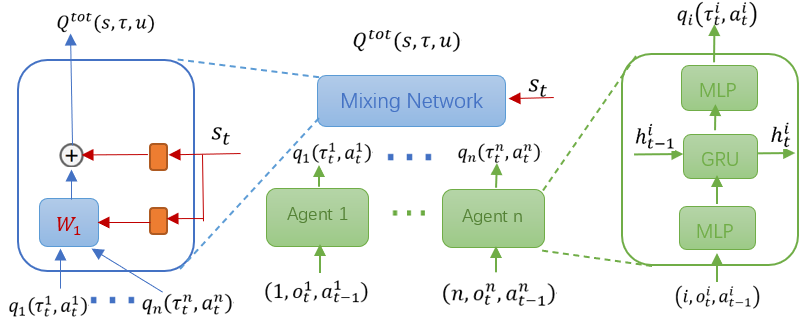
深度强化学习方法在许多具有挑战性的协作多智能体任务中表现出了出色的性能。两个主要有前途的研究方向是多智能体价值函数分解和多智能体策略梯度。在本文中,我们提出了一种新的分解多智能体软演员评论家(mSAC)方法,它有效地结合了上述两种方法的优点 ...
我们如何才能赋予机器人精确操纵物体的能力,同时也能根据抽象概念来推理物体?最近的操纵工作表明,端到端网络可以学习需要精确空间推理的灵巧技能,但这些方法通常无法泛化到新目标或快速学习跨任务的可转移概念。与此同时,通过大规模互联网数据的训练,在学习视觉和语言的通用语义表示方面取得了巨大进展,但这些表示缺乏细粒度操作所需的空间理解。为此,我们提出了一个结合了两全其美的框架:具有语义和空间路径的双流架构, ...
