打赏本站
微信
 支付宝
支付宝

支付宝
四旋翼飞行器是灵活的平台。在人类专家的帮助下,它们可以在杂乱的环境中执行极高速的飞行。然而,高速完全自主飞行仍然是一个重大挑战 ...
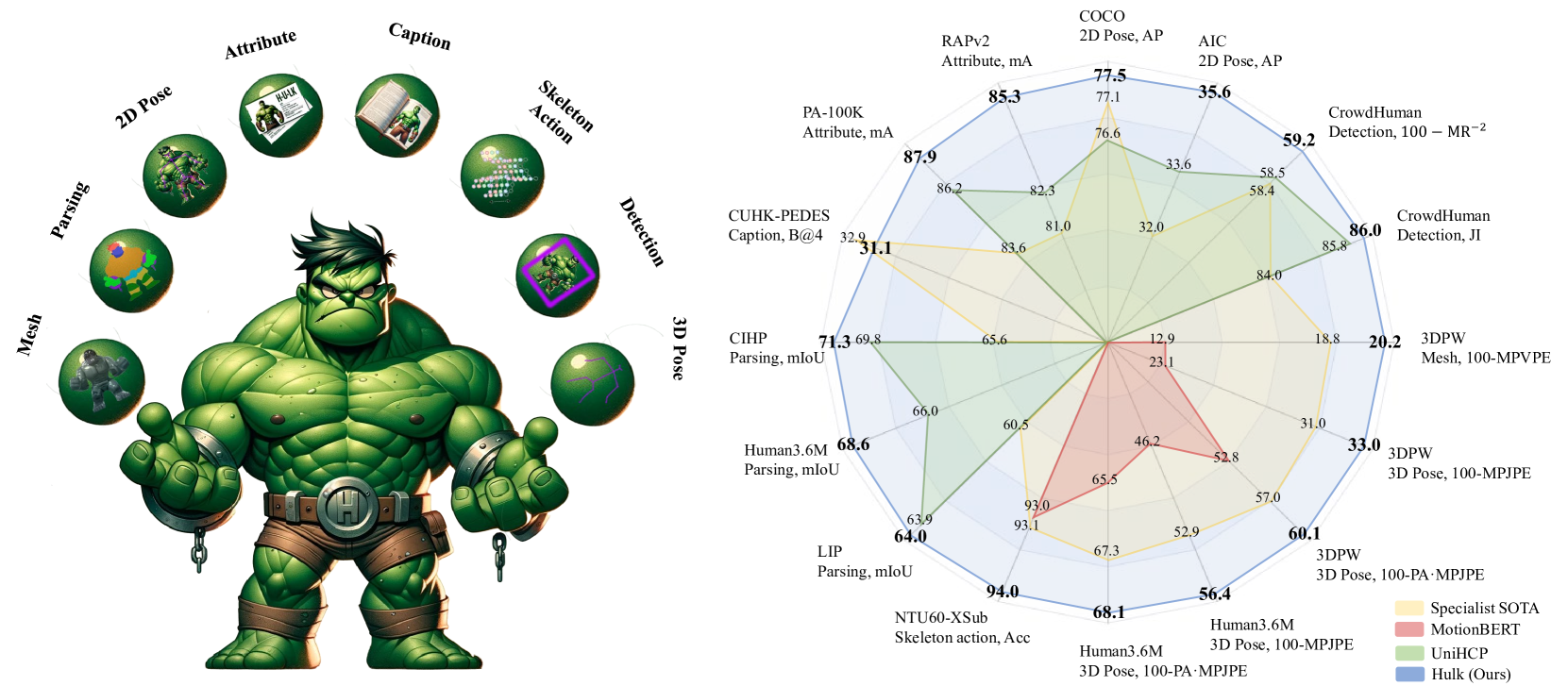
以人为中心的感知任务,例如行人检测、基于骨架的动作识别和姿势估计,具有广泛的工业应用,例如元宇宙和运动分析 ...
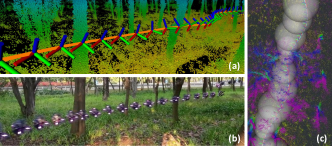
近年来,随着空中机器人自主化程度的不断提高,无人机自主竞赛越来越受到关注。在专业的飞行员比赛中,熟练的操作者总是以咄咄逼人的姿态控制无人机敏捷避障,以最快的速度到达目的地。像精英飞行员一样的自主飞行需要在 SE(3) 中进行规划,其非平凡性和复杂性目前阻碍了我们社区中令人信服的解决方案 ...

MiniGPT-4和LLaVA等大型视觉语言模型(LVLM)已经展示了理解图像的能力,并在各种视觉任务中取得了出色的性能。尽管由于大量的训练数据集,它们识别常见对象的能力很强,但它们缺乏特定的领域知识,并且对对象内的局部细节的理解较弱,这阻碍了它们在工业异常检测(IAD)任务中的有效性。另一方面,大多数现有的IAD方法仅提供异常分数,并且需要手动设置阈值来区分正常样本和异常样本,这限制了其实际实施 ...
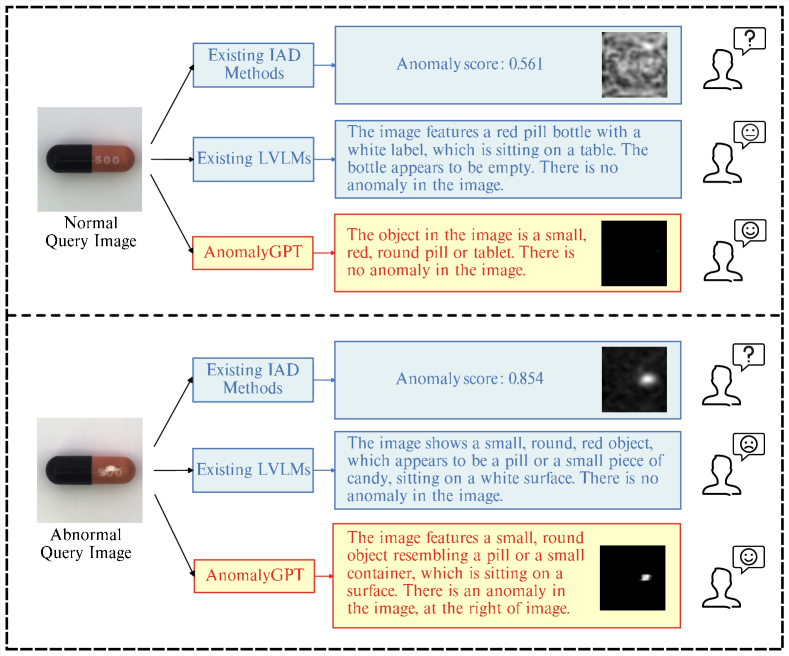
现有的工业异常检测(IAD)方法可以预测异常检测和定位的异常分数。然而,他们很难执行多轮对话和异常区域的详细描述,例如 ...

近年来深度学习的快速发展为工业图像异常检测(IAD)奠定了里程碑。在本文中,我们从神经网络架构、监督级别、损失函数、指标和数据集的角度对基于深度学习的图像异常检测技术进行了全面的回顾。此外,我们从工业制造中提取新的设置,并在我们提出的新设置下回顾当前的 IAD 方法 ...

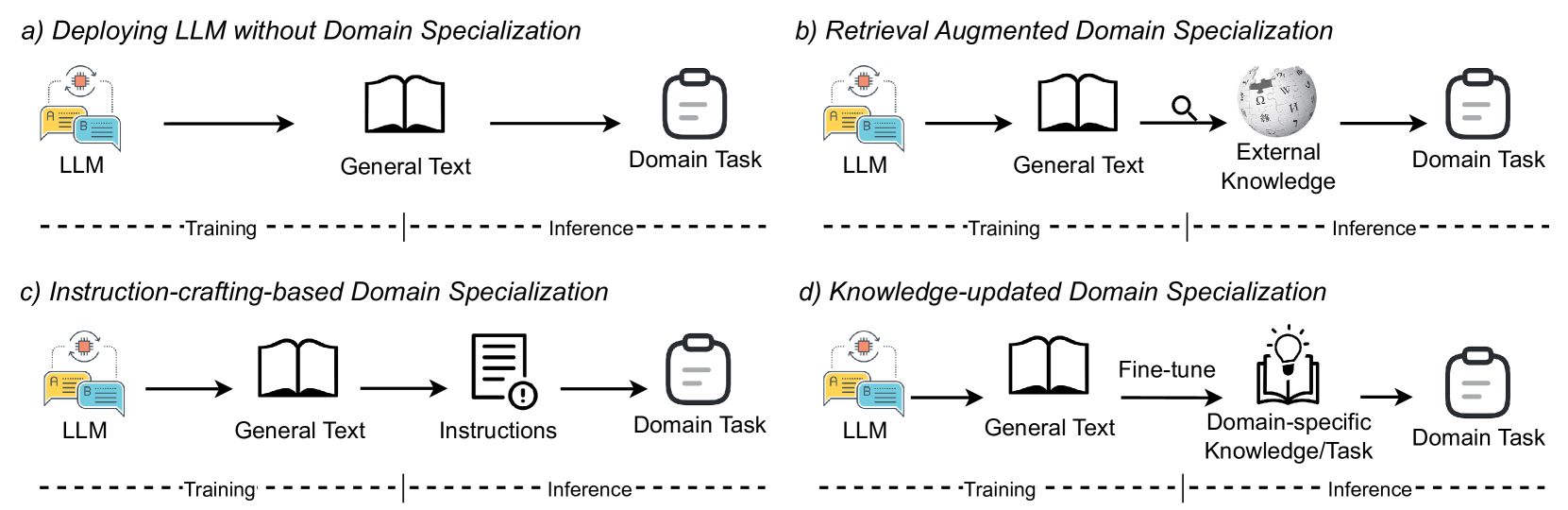
大型语言模型 (LLM) 极大地推进了自然语言处理 (NLP) 领域的发展,为广泛的应用提供了非常有用、与任务无关的基础。然而,直接应用 LLM 来解决特定领域的复杂问题会遇到许多障碍,这些障碍是由领域数据的异构性、领域知识的复杂性、领域目标的唯一性以及约束的多样性造成的 ...
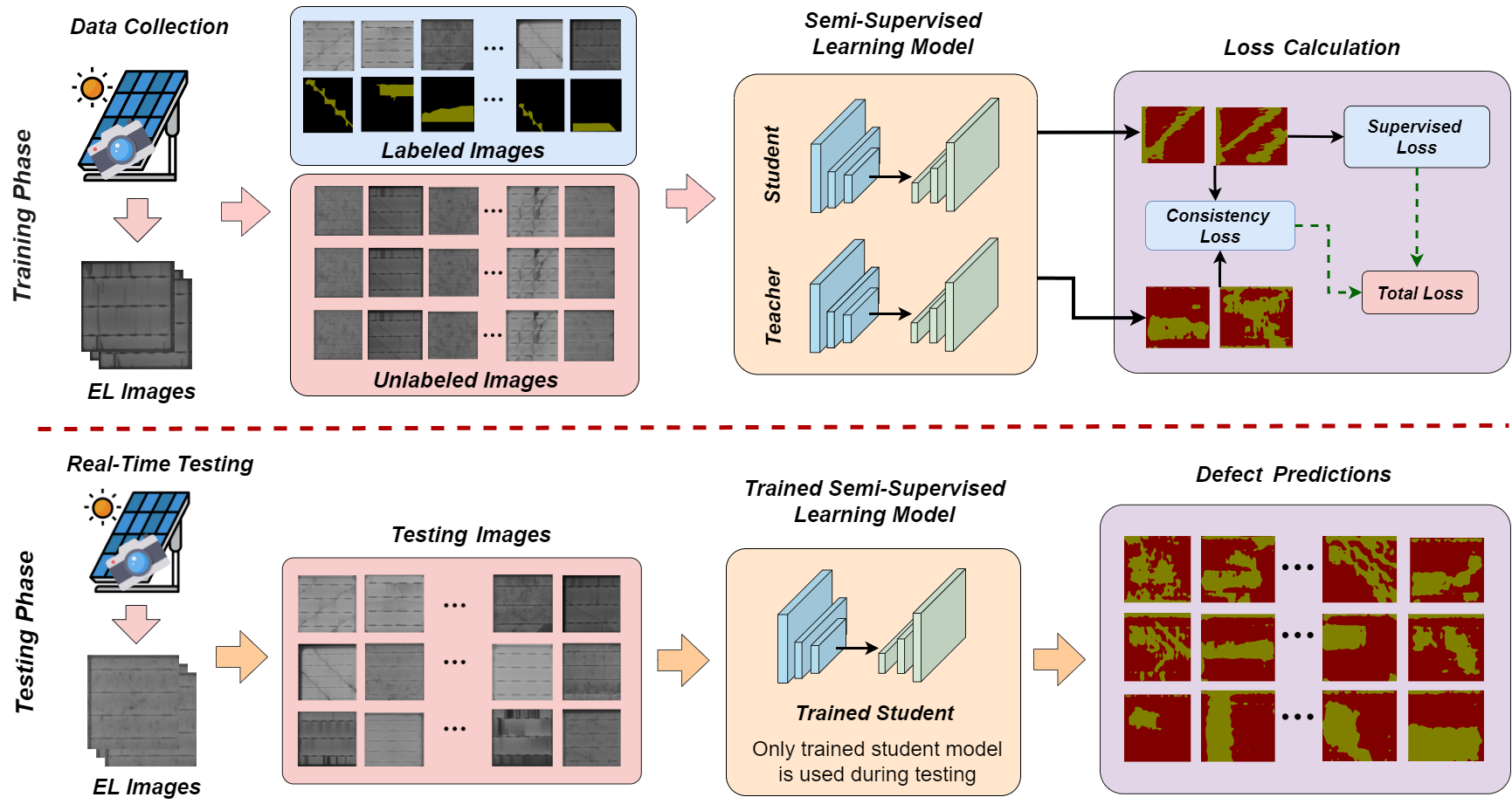
光伏 (PV) 系统使我们能够利用所有丰富的太阳能,但它们需要定期维护才能实现高效率并防止退化。使用电致发光 (EL) 成像的传统手动健康检查成本高昂且在逻辑上具有挑战性,因此自动化缺陷检测至关重要。当前的自动化方法需要大量的专家手动标记,这既耗时又昂贵,而且容易出错 ...